You might also like
- Лабораторна Робота5 - MS Office 2007Document12 pagesЛабораторна Робота5 - MS Office 2007berengovith1997100% (1)
- Лаб 1Document14 pagesЛаб 1Ваня Вараниця100% (1)
- 6.Теорема Вієта. Розв'Язування ВправDocument13 pages6.Теорема Вієта. Розв'Язування ВправrostisNo ratings yet
- ТЕМА 7. ЛЕКЦІЯ-ПРЕЗЕНТАЦІЯDocument19 pagesТЕМА 7. ЛЕКЦІЯ-ПРЕЗЕНТАЦІЯАнастасія Сорока100% (1)
- Математика 2Document14 pagesМатематика 2Максим100% (1)
- Olimpiada 10 KlasDocument13 pagesOlimpiada 10 KlasСергей Чернецький0% (1)
- Попередня обробка експериментальних даних. Критерії відсіювання завідомо помилкових даних.Document21 pagesПопередня обробка експериментальних даних. Критерії відсіювання завідомо помилкових даних.wisssskasssNo ratings yet
- KVG PR6Document22 pagesKVG PR6Юля ЛимановаNo ratings yet
- контрольна з алгебриDocument1 pageконтрольна з алгебриPlaton BroNo ratings yet
- Розкриття дужокDocument1 pageРозкриття дужокMurat MuratNo ratings yet
- Лекція №1 - Теорія множинDocument54 pagesЛекція №1 - Теорія множинgonervpNo ratings yet
- ІТуПД Лб10 ExcelDocument32 pagesІТуПД Лб10 ExcelдашаNo ratings yet
- 5 Matematyka Tarasenkova 2022Document303 pages5 Matematyka Tarasenkova 2022habababaNo ratings yet
- магістерська PDFDocument42 pagesмагістерська PDFNatalya FuchkevichNo ratings yet
- Final TestsDocument8 pagesFinal TestsВлад Осипчук100% (1)
- Оліярчук Т І КБ 48 ЛБ3Document31 pagesОліярчук Т І КБ 48 ЛБ3DEN PLAYNo ratings yet
- 87 Корені многочленів. Теорема БезуDocument21 pages87 Корені многочленів. Теорема БезуArtemNo ratings yet
- 11 клас Інформаційна безпека ТестDocument7 pages11 клас Інформаційна безпека ТестАнастасия Щука100% (1)
- Алгебра 7 клас. Контрольна робота №4Document2 pagesАлгебра 7 клас. Контрольна робота №4Mary Rastishka100% (1)
- Лаб№2Document19 pagesЛаб№2Богдан ОкуневичNo ratings yet
- Група 2 20.03, 27.03.pdfDocument4 pagesГрупа 2 20.03, 27.03.pdfГалушко МикитаNo ratings yet
- Лаб№3Document23 pagesЛаб№3Богдан ОкуневичNo ratings yet
- Лаб1Document8 pagesЛаб1Kto YaNo ratings yet
- Matematichniy DovidnikDocument51 pagesMatematichniy DovidnikZlata OsypovaNo ratings yet
- =ТЕМА № 4 Складні дробові нерівностіDocument33 pages=ТЕМА № 4 Складні дробові нерівностіВиктор ГаркушаNo ratings yet
- КП ЧМ 2Document13 pagesКП ЧМ 2Tanya PastushokNo ratings yet
- =ТЕМА № 3 Метод інтервалів розкриття нерівностейDocument17 pages=ТЕМА № 3 Метод інтервалів розкриття нерівностейВиктор ГаркушаNo ratings yet
- ПИТАННЯ до ІСПИТУ.в.1Document7 pagesПИТАННЯ до ІСПИТУ.в.1Мария ФоменкоNo ratings yet
- PZ15_Gribanov_CM_LAB06_07Document6 pagesPZ15_Gribanov_CM_LAB06_07van.a.gribanovNo ratings yet
- Spravka SymDocument9 pagesSpravka Symmarkotav20No ratings yet
- 293418Document6 pages293418for.homework21.08No ratings yet
- MatsakDocument72 pagesMatsakhello worldNo ratings yet
- SPRAVKA MatlabDocument12 pagesSPRAVKA Matlabmarkotav20No ratings yet
- Лек 2 МОDocument17 pagesЛек 2 МОjk gjNo ratings yet
- Розділ 7. Наближення ФункційDocument42 pagesРозділ 7. Наближення ФункційІгор ПоліщукNo ratings yet
- Урок 1 Екстремуми функції. Необхідна і достатня умови екстремумуDocument6 pagesУрок 1 Екстремуми функції. Необхідна і достатня умови екстремумуmorttrom11No ratings yet
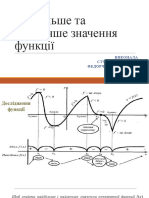
- Найбільше Та Найменше Значення ФункціїDocument19 pagesНайбільше Та Найменше Значення ФункціїValia FedorchukNo ratings yet
- ТЕМА 2Document30 pagesТЕМА 2paveloksenenk2005No ratings yet
- Розв'язання алгебраїчних рівняньDocument30 pagesРозв'язання алгебраїчних рівняньmuhamed24235No ratings yet
- Група 17 13.03, 16.03, 17.03 PDFDocument8 pagesГрупа 17 13.03, 16.03, 17.03 PDFLiza BaranovaNo ratings yet
- ООП ЛР 01 Написання програм з вкладеними циклами та розгалуженнями, використанням математичних функційDocument5 pagesООП ЛР 01 Написання програм з вкладеними циклами та розгалуженнями, використанням математичних функційАндрей ГирченкоNo ratings yet
- 231238Document8 pages231238Андрій ПанасюкNo ratings yet
- PR 4Document10 pagesPR 4SoshO PetrenkoNo ratings yet
- PR 2Document6 pagesPR 2SoshO PetrenkoNo ratings yet
- метод інтервалівDocument4 pagesметод інтервалівНаталія ГерасимчукNo ratings yet
- V 13Document4 pagesV 13savagladkiy0001No ratings yet
- Ділення многочленівDocument30 pagesДілення многочленівТатьяна ПлисNo ratings yet
- Lab 3Document6 pagesLab 3Max SlobodianNo ratings yet
- Лаб№4Document18 pagesЛаб№4Богдан ОкуневичNo ratings yet
- 4 ПРАКТИЧНЕ ЗАНЯТТЯ-1Document17 pages4 ПРАКТИЧНЕ ЗАНЯТТЯ-1bogdan20001000No ratings yet
- тімо 7Document16 pagesтімо 7hasLFaDNo ratings yet
- лаб3Document21 pagesлаб3FORADYNo ratings yet
- Тема 2 НЕЛІНІЙНЕDocument12 pagesТема 2 НЕЛІНІЙНЕIryna IgorivnaNo ratings yet
- 01 Approximation LagrangDocument4 pages01 Approximation Lagranganimepars1falNo ratings yet
- БеланьDocument16 pagesБеланьАнастасия ГуцалоNo ratings yet
- Рівняння з параметрамиDocument52 pagesРівняння з параметрамиbazaprosto82No ratings yet
- ЗАВДАННЯ НА ЛІТОDocument8 pagesЗАВДАННЯ НА ЛІТОdddaddd1222No ratings yet
- теорія ймовірностіDocument11 pagesтеорія ймовірностіТетяна ПотаповаNo ratings yet
- параметриDocument40 pagesпараметриTan ZayNo ratings yet
- АСД 6 завдання борисенко 100%Document7 pagesАСД 6 завдання борисенко 100%Даниил БорисенкоNo ratings yet