You might also like
- Iveco Nef Engines F4ae Thru F4he Wshop ManualDocument788 pagesIveco Nef Engines F4ae Thru F4he Wshop ManualDarrell Nickels100% (19)
- ME 305 Part 6 Differential Formulation of Fluid FlowDocument10 pagesME 305 Part 6 Differential Formulation of Fluid FlowLuigi LentiniNo ratings yet
- AC DC Electric MotorsDocument64 pagesAC DC Electric MotorsHamza Ahmad100% (2)
- Caterpillar D3 LGP PDFDocument20 pagesCaterpillar D3 LGP PDFruby100% (4)
- Vibration Week 1 & 2Document13 pagesVibration Week 1 & 2SYEDOUNMUHAMMAD ZAIDINo ratings yet
- Motion of a Fluid ElementDocument10 pagesMotion of a Fluid ElementMahesh LohanoNo ratings yet
- Vib 2022 W01 1Document14 pagesVib 2022 W01 1hamza saleemNo ratings yet
- DOM Lecture 2Document15 pagesDOM Lecture 2Shovan KarmakarNo ratings yet
- Shaft Design and Associated TechnologyDocument17 pagesShaft Design and Associated Technologyarmas lamasyaNo ratings yet
- Principios Básicos ActuadoresDocument108 pagesPrincipios Básicos ActuadoresJonathan TerrónNo ratings yet
- Ch.02 Modeling of Vibratory SystemsDocument15 pagesCh.02 Modeling of Vibratory SystemsNguyen Dinh TuanNo ratings yet
- Flywheel Effect or Polar Moment of Inertia - Engineers EdgeDocument2 pagesFlywheel Effect or Polar Moment of Inertia - Engineers Edgestallone21No ratings yet
- Bond GraphDocument15 pagesBond GraphtafazulijazNo ratings yet
- Mire VibrationDocument362 pagesMire VibrationMuket AgmasNo ratings yet
- University of Gondar School of Technology Department of Mechanical EngineeringDocument184 pagesUniversity of Gondar School of Technology Department of Mechanical EngineeringMuket AgmasNo ratings yet
- Mechanical Vibrations Slides PDFDocument474 pagesMechanical Vibrations Slides PDFAravind DrogbaNo ratings yet
- Lecture 6-8 MechanicalDocument13 pagesLecture 6-8 MechanicalOsama SiddiquiNo ratings yet
- Lecture 6-8 MechanicalDocument13 pagesLecture 6-8 MechanicalOsama Siddiqui100% (1)
- Lecture 6-8 MechanicalDocument13 pagesLecture 6-8 MechanicalOsama SiddiquiNo ratings yet
- VibrationDocument44 pagesVibrationgunadevanNo ratings yet
- 3.1 Chapter Three - Torsion1Document12 pages3.1 Chapter Three - Torsion1Haibat Sultan StationeryNo ratings yet
- MATLAB For Automobile and Mechanical EngineeringDocument303 pagesMATLAB For Automobile and Mechanical EngineeringnikhilNo ratings yet
- Composite Materials Design GuideDocument33 pagesComposite Materials Design GuideTayyab AttariNo ratings yet
- Chapter 2: Modeling Mechanical Systems: Applying Newton's 2 Law (F Ma) Fundamental CharacteristicsDocument29 pagesChapter 2: Modeling Mechanical Systems: Applying Newton's 2 Law (F Ma) Fundamental CharacteristicsMohammad BilalNo ratings yet
- Dynamics 19 LectureDocument47 pagesDynamics 19 LecturePedro CarmonaNo ratings yet
- Session03 - Mechanical VibrationDocument7 pagesSession03 - Mechanical Vibrationعبدالرحمن منصورNo ratings yet
- SpringsDocument36 pagesSpringsFortune FireNo ratings yet
- Ch.02 Modeling of Vibratory SystemsDocument17 pagesCh.02 Modeling of Vibratory SystemsanleNo ratings yet
- PhysicsDocument28 pagesPhysicsDominika RossudowskiNo ratings yet
- SPE Webinar Capillary Rheometry Catherine April 2021Document51 pagesSPE Webinar Capillary Rheometry Catherine April 2021Kashif MuhammadNo ratings yet
- Electromagnetic Force Couplingin - ANSYS PDFDocument48 pagesElectromagnetic Force Couplingin - ANSYS PDFrahulbqaNo ratings yet
- Bond Graph - WikipediaDocument16 pagesBond Graph - WikipediaRanjit KumarNo ratings yet
- Mechanical Engineering Course Guide: Brakes and Clutches TheoryDocument63 pagesMechanical Engineering Course Guide: Brakes and Clutches Theory222Gaurav AherNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 course roadmap modeling analysis and designDocument5 pagesME451 course roadmap modeling analysis and designVu NghiaNo ratings yet
- IJE Template 2021Document5 pagesIJE Template 2021svsNo ratings yet
- Numerical Methods To Calculate Gear Transmission Noise: Hellinger, H. Ch. Raffel, and Ph. RainerDocument9 pagesNumerical Methods To Calculate Gear Transmission Noise: Hellinger, H. Ch. Raffel, and Ph. RainerFiras BejarNo ratings yet
- Janos Batorfi - transmission systemsDocument3 pagesJanos Batorfi - transmission systemsMogaNo ratings yet
- Calculation of Loads - Basic Bearing KnowledgeDocument17 pagesCalculation of Loads - Basic Bearing KnowledgekaustavNo ratings yet
- Analysis and Performance of Automobile Engine Components Considering Thermal and Structural EffectsDocument12 pagesAnalysis and Performance of Automobile Engine Components Considering Thermal and Structural EffectsGPrasanna KumarNo ratings yet
- Electricalnotes Wordpress Com 2011 04 24 PCV Cable Current RatingDocument11 pagesElectricalnotes Wordpress Com 2011 04 24 PCV Cable Current RatingArie Amri MartaNo ratings yet
- FEA of Tube Cap in FemapDocument93 pagesFEA of Tube Cap in FemapXabier ZarrandicoecheaNo ratings yet
- Three-Axis Active Control Magnetic Bearing With Asymmetric Structure For High-Temperature MachinesDocument1 pageThree-Axis Active Control Magnetic Bearing With Asymmetric Structure For High-Temperature Machinesxiaoqi dengNo ratings yet
- Bike SuspensionDocument5 pagesBike SuspensionAnirudh PanickerNo ratings yet
- Mechanisms Terminology ModuleDocument55 pagesMechanisms Terminology Modulemani88kctNo ratings yet
- VSEA Webinar FinalDocument49 pagesVSEA Webinar FinalJitendra ItankarNo ratings yet
- Lecture 1Document18 pagesLecture 1Mahendra ChilakalaNo ratings yet
- All Engphys FormulasDocument5 pagesAll Engphys FormulasCres Dan Jr. BangoyNo ratings yet
- Lecture 1 SD Introduction 2023Document52 pagesLecture 1 SD Introduction 2023Uttam KarkeeNo ratings yet
- DMFWDocument1 pageDMFWAndre PNo ratings yet
- Dynamic Analysis of Towers: Dr. K. Muthumani & Dr. N.GopalakrishnanDocument154 pagesDynamic Analysis of Towers: Dr. K. Muthumani & Dr. N.GopalakrishnanSube OhNo ratings yet
- Mechanical Vibrations PDFDocument223 pagesMechanical Vibrations PDFmark mutimushiNo ratings yet
- RM 2019 1 Pag 04 HongDocument4 pagesRM 2019 1 Pag 04 HongLê TrungNo ratings yet
- Classical Mechanics: For Other Uses, SeeDocument7 pagesClassical Mechanics: For Other Uses, SeeJordan MosesNo ratings yet
- Really Print Lecture 6-2Document2 pagesReally Print Lecture 6-2Nicholas NicholasNo ratings yet
- 19 Lecture PPTDocument47 pages19 Lecture PPTFrederick DugayNo ratings yet
- ME3026 Dynamics Chap1 2 Merged - RemovedDocument44 pagesME3026 Dynamics Chap1 2 Merged - RemovedNguyễn Nam AnhNo ratings yet
- 19 LectureDocument47 pages19 LectureMOHD FIRDAUS BIN JAAFAR / UPMNo ratings yet
- Rotordynamics 1: bending critical speeds and rotor balancingDocument14 pagesRotordynamics 1: bending critical speeds and rotor balancingMarco NeveNo ratings yet
- Vibration Lec1Document3 pagesVibration Lec1عبدالرحمن منصورNo ratings yet
- Session03 - Mechanical VibrationDocument7 pagesSession03 - Mechanical Vibrationعبدالرحمن منصورNo ratings yet
- Session01 - Introduction To Mechanical VibrationDocument4 pagesSession01 - Introduction To Mechanical Vibrationعبدالرحمن منصورNo ratings yet
- 2017 Assignment01 Vibration-ShubraDocument5 pages2017 Assignment01 Vibration-Shubraعبدالرحمن منصورNo ratings yet
- Gas Turbine Efficiency Improvement with RegenerationDocument7 pagesGas Turbine Efficiency Improvement with Regenerationعبدالرحمن منصورNo ratings yet
- Turbo MachineDocument9 pagesTurbo Machineعبدالرحمن منصورNo ratings yet
- Session06 - Part II-Actuator-MotorsDocument8 pagesSession06 - Part II-Actuator-Motorsعبدالرحمن منصورNo ratings yet
- Directional Control Valves: ObjectivesDocument11 pagesDirectional Control Valves: Objectivesعبدالرحمن منصورNo ratings yet
- Lec.1 Gas Turbine CyclesDocument31 pagesLec.1 Gas Turbine Cyclesعبدالرحمن منصورNo ratings yet
- Session01 - Introduction To Fluid PowerDocument6 pagesSession01 - Introduction To Fluid Powerعبدالرحمن منصورNo ratings yet
- Session02 - Basic Physical PrinciplesDocument5 pagesSession02 - Basic Physical Principlesعبدالرحمن منصورNo ratings yet
- Fluid Power Symbols and StandardsDocument6 pagesFluid Power Symbols and Standardsعبدالرحمن منصورNo ratings yet
- Carburetion Catalog 2002Document305 pagesCarburetion Catalog 2002LukidjNo ratings yet
- Machine Harness Connector and Component Locations: 12H, 140H, and 160H Electrical System Motor Grader (NA Version)Document2 pagesMachine Harness Connector and Component Locations: 12H, 140H, and 160H Electrical System Motor Grader (NA Version)Davy GonzalezNo ratings yet
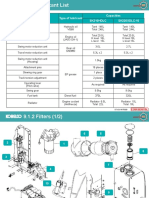
- Components Type of Lubricant Capacities SK210HDLC SK220XDLC-10Document4 pagesComponents Type of Lubricant Capacities SK210HDLC SK220XDLC-10ashish gautamNo ratings yet
- Cambelt and Water Pump Change MultiplaDocument12 pagesCambelt and Water Pump Change Multiplaa1037699No ratings yet
- BSA M20 Maintenance ManualDocument55 pagesBSA M20 Maintenance ManualAlok Balsekar100% (1)
- OptimusDocument56 pagesOptimusAnpolNo ratings yet
- Toyota 7FG 7FD 7FGK 7FDK Forklift Trucks Repair Manual PDFDocument111 pagesToyota 7FG 7FD 7FGK 7FDK Forklift Trucks Repair Manual PDFdolientes plazaamericas100% (2)
- Kubota Front LoaderDocument43 pagesKubota Front Loadersaten lalNo ratings yet
- Dynamic force analysis of four-bar linkageDocument2 pagesDynamic force analysis of four-bar linkageshanmugampsgNo ratings yet
- Zico Descarga Dump ValveDocument12 pagesZico Descarga Dump ValveJanusNo ratings yet
- Opel Corsa C Fault CodesDocument98 pagesOpel Corsa C Fault Codesnick_pourmi137100% (2)
- ACT1000 User ManualDocument45 pagesACT1000 User ManualivanNo ratings yet
- Work Experience in Maintenance ManagementDocument2 pagesWork Experience in Maintenance ManagementSélcio PaulinaNo ratings yet
- Gardner DenverDocument35 pagesGardner DenverAndres Felipe Garcia ReinaNo ratings yet
- Ag010ksvajh - Ag010ksvajhaa Exploded Parts ViewDocument15 pagesAg010ksvajh - Ag010ksvajhaa Exploded Parts ViewKarthikeyan VisvakNo ratings yet
- Automotive Sensors & Actuators - PreconferenceDocument68 pagesAutomotive Sensors & Actuators - PreconferenceSiddharth Narayanan ChidambareswaranNo ratings yet
- Final Pre-Board (Mathematics, Power Plant & Machine Design)Document2 pagesFinal Pre-Board (Mathematics, Power Plant & Machine Design)Dominic LibradillaNo ratings yet
- Francis Turbine: Abbas Bilal Sami Hussein Name: Subject: Third Power Plant Class /branch: D.Laith Ayad SupervisorDocument6 pagesFrancis Turbine: Abbas Bilal Sami Hussein Name: Subject: Third Power Plant Class /branch: D.Laith Ayad Supervisorabbas bilalNo ratings yet
- Cat 793D PDFDocument32 pagesCat 793D PDFmark towerNo ratings yet
- OBD II Diagnostic Trouble Code GuideDocument71 pagesOBD II Diagnostic Trouble Code GuideEdgardo RivasNo ratings yet
- FlowMasterII PumpDocument3 pagesFlowMasterII Pumpsugiyono81No ratings yet
- Manuel Volvo B17 B19 B21 B23 1975-85Document108 pagesManuel Volvo B17 B19 B21 B23 1975-85monodNo ratings yet
- ME 7 - Activity 5Document5 pagesME 7 - Activity 5Rygen Faye Del RosarioNo ratings yet
- HDP 172Document4 pagesHDP 172Nahid RahmaniNo ratings yet
- GLO-SP62P PMDocument31 pagesGLO-SP62P PMalexchateu-1No ratings yet
- MAHLE Product Catalog Cat 3116 Dijelovi MotoraDocument18 pagesMAHLE Product Catalog Cat 3116 Dijelovi MotoraMile BelojicaNo ratings yet
- Friction SpinningDocument2 pagesFriction SpinningShailendra MishraNo ratings yet
- HT Cable Catalog Polycab - Part23 PDFDocument1 pageHT Cable Catalog Polycab - Part23 PDFnvinodn06No ratings yet
- Saeco Incanto Sup021yrDocument4 pagesSaeco Incanto Sup021yrAndrzej Borowy100% (1)