You might also like
- Introduction Solid State Drives EME503Document26 pagesIntroduction Solid State Drives EME503Abdalla El DemrdashNo ratings yet
- MODULE 1 - Introduction To Electrical DrivesDocument34 pagesMODULE 1 - Introduction To Electrical DrivesAshraf FauzanNo ratings yet
- Chapter 1 Det50063 - IntroductionDocument12 pagesChapter 1 Det50063 - IntroductionFara FaraNo ratings yet
- Electrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Document83 pagesElectrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Thivya PrasadNo ratings yet
- Introduction To Industrial DrivesDocument70 pagesIntroduction To Industrial Drivesvnyshreyas100% (4)
- PDFDocument32 pagesPDFdinesh kNo ratings yet
- Panimalar Engineering Collge: Department of Mechanical Engineering Ii Year / Iii SemesterDocument32 pagesPanimalar Engineering Collge: Department of Mechanical Engineering Ii Year / Iii SemestersivaNo ratings yet
- See 1306Document153 pagesSee 1306Mogaka LucasNo ratings yet
- Chapter 1 - Electric DriveDocument76 pagesChapter 1 - Electric DriveNajihah YusofNo ratings yet
- EDCDocument178 pagesEDCAjay Kavi100% (1)
- Power Electronics and EDDocument45 pagesPower Electronics and EDtefe yabatuNo ratings yet
- CED CH 1 Introduction v1 03042018 095851AMDocument7 pagesCED CH 1 Introduction v1 03042018 095851AMRizwan AhemadNo ratings yet
- Chapter 1 Intro To Electrical DrivesDocument76 pagesChapter 1 Intro To Electrical DrivesAfiq ZahinNo ratings yet
- Advanced Electrical Machines and Drives: Dr. Muhammad HumzaDocument22 pagesAdvanced Electrical Machines and Drives: Dr. Muhammad HumzaMuhammedNo ratings yet
- EDC Unit-1 PDFDocument32 pagesEDC Unit-1 PDFsivaNo ratings yet
- Bule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesDocument14 pagesBule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesBilisuma DamiteNo ratings yet
- Lecture Notes On Utilization of Electric PDFDocument421 pagesLecture Notes On Utilization of Electric PDFPuneeth PuniNo ratings yet
- Cha 1Document14 pagesCha 1yaredNo ratings yet
- Introduction To Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramDocument21 pagesIntroduction To Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramtoshaliNo ratings yet
- Chapter 1 - ADocument23 pagesChapter 1 - AAHMAD ASRI ABD SAMATNo ratings yet
- Electric Drives Unit-1 Lecture Session-1Document21 pagesElectric Drives Unit-1 Lecture Session-1Melam SurendraNo ratings yet
- DRIVES PPT45 - 16255 - EE424 - 2015 - 1 - 2 - 1 - Week 1Document12 pagesDRIVES PPT45 - 16255 - EE424 - 2015 - 1 - 2 - 1 - Week 1Prema Kumar NavuriNo ratings yet
- Electric Drive Systems: What Is A Drive System?Document10 pagesElectric Drive Systems: What Is A Drive System?Emirhan AlmaNo ratings yet
- Types of DriveDocument13 pagesTypes of DrivecoolrajeeeNo ratings yet
- Final PDF EditedDocument6 pagesFinal PDF EditedFirdous NaazNo ratings yet
- SSD Unit 1Document24 pagesSSD Unit 1Shashank SinghNo ratings yet
- Introduction To Electric DrivesDocument75 pagesIntroduction To Electric DrivesVikas PooniaNo ratings yet
- Chapter 3: Electric Drives and Converters Feeding Electric MotorsDocument11 pagesChapter 3: Electric Drives and Converters Feeding Electric MotorsSelemon AssefaNo ratings yet
- Solid State Drives - 02 - by WWW - Learnengineering.inDocument141 pagesSolid State Drives - 02 - by WWW - Learnengineering.inRAJESHNo ratings yet
- 1.1 IntroductionDocument15 pages1.1 IntroductionAlphaBravoNo ratings yet
- N.B.K.R. Institute of Science & Technology (Autonomous) Affiliated To JNTUA, AnantapuramuDocument42 pagesN.B.K.R. Institute of Science & Technology (Autonomous) Affiliated To JNTUA, AnantapuramuMunvar AliNo ratings yet
- Choice (Or) Selection of Electrical Drives: Unit - I - Electric Drives Lecture-2Document3 pagesChoice (Or) Selection of Electrical Drives: Unit - I - Electric Drives Lecture-2Anup NaskarNo ratings yet
- Solid State Drives Digital NotesDocument195 pagesSolid State Drives Digital NotesShanmukh VegiNo ratings yet
- 1 - Part - One - LecturesDocument74 pages1 - Part - One - Lecturesrida.hamza.muhammadNo ratings yet
- Industrial Drives & Applications: Module - 1Document19 pagesIndustrial Drives & Applications: Module - 1NiharikaNo ratings yet
- Lecture No 2Document25 pagesLecture No 2Walid salamaNo ratings yet
- Aed Unit3Document68 pagesAed Unit3Anser Pasha100% (1)
- 1.introduction To Electrical DrivesDocument22 pages1.introduction To Electrical DrivesSimbarashe ChitsungeNo ratings yet
- Module1 PDFDocument19 pagesModule1 PDFSetya ArdhiNo ratings yet
- Chapter 1 - 2160913 - CEDDocument28 pagesChapter 1 - 2160913 - CEDbhagchandt817No ratings yet
- Drives: Electric MotorDocument12 pagesDrives: Electric MotorShubham KumarNo ratings yet
- MJET Engg. CollegeDocument74 pagesMJET Engg. CollegePiyush AgrawalNo ratings yet
- Energy Efficiency in Electrical UtilitiesDocument82 pagesEnergy Efficiency in Electrical Utilitiesmanorajcv100% (1)
- Electric Drives L1 IntroductionDocument21 pagesElectric Drives L1 IntroductionHarshal KanumuriNo ratings yet
- Electrical Drive NOTE 1 Isaac UPDATED 2022Document15 pagesElectrical Drive NOTE 1 Isaac UPDATED 2022Izi KaroNo ratings yet
- Ee 8353 - Unit IDocument141 pagesEe 8353 - Unit IBalamurugan SMNo ratings yet
- Solid State Drives Ee2352 SSD NotesDocument19 pagesSolid State Drives Ee2352 SSD NotesGooge ReviewerNo ratings yet
- Electric MotorDocument40 pagesElectric MotorhmiwukcyNo ratings yet
- Introduction To Generalities of Electric DrivesDocument23 pagesIntroduction To Generalities of Electric DrivesElie KabangaNo ratings yet
- Introduction To Electrical Drives: Figure 1 Conventional Variable Speed Electrical Drive SystemDocument19 pagesIntroduction To Electrical Drives: Figure 1 Conventional Variable Speed Electrical Drive SystemChakradhara TheppavariNo ratings yet
- Introduction To Electrical DrivesDocument18 pagesIntroduction To Electrical DrivesSidali Chaib50% (2)
- M Group: Electrical Drives and Control - EE 1213Document18 pagesM Group: Electrical Drives and Control - EE 1213scribdm100% (3)
- Lecture No 1Document31 pagesLecture No 1Walid salamaNo ratings yet
- Chapter 1Document45 pagesChapter 1tebelayhabitamu12No ratings yet
- Power Electronics: Lecture Notes of Power Electronics CourseFrom EverandPower Electronics: Lecture Notes of Power Electronics CourseNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- 1 LectureDocument16 pages1 Lectureمصطفى حمدىNo ratings yet
- FLupeJFHSye7qXiRR9sn0g Sect3-3Document8 pagesFLupeJFHSye7qXiRR9sn0g Sect3-3مصطفى حمدىNo ratings yet
- Speed Control IM (Edited)Document37 pagesSpeed Control IM (Edited)مصطفى حمدىNo ratings yet
- CH 2 - Local Area NetworksDocument171 pagesCH 2 - Local Area Networksمصطفى حمدىNo ratings yet
- Starting IMDocument32 pagesStarting IMمصطفى حمدىNo ratings yet
- Revision IMDocument22 pagesRevision IMمصطفى حمدىNo ratings yet
- Ets 11Document6 pagesEts 11zytura2019No ratings yet
- Cassien Technical ReportDocument68 pagesCassien Technical ReportNtibagirimpuhwe cassienNo ratings yet
- Pte12n BPT 001 enDocument32 pagesPte12n BPT 001 enRajesh KrishnaNo ratings yet
- Assembly Instruction: Hydraulic Rotary Actuator Size SM4.40 To SM4.300Document10 pagesAssembly Instruction: Hydraulic Rotary Actuator Size SM4.40 To SM4.300Ricardo Vergara VargasNo ratings yet
- Wiring Diagram: Rear Window DefoggerDocument1 pageWiring Diagram: Rear Window DefoggerAlexgavgray GNo ratings yet
- 2014-0062 Circuits ManualDocument67 pages2014-0062 Circuits ManualPeter Werner Reindel LarsenNo ratings yet
- PDM Catalog: Car Name Specs Stats Overall ScoreDocument22 pagesPDM Catalog: Car Name Specs Stats Overall ScoreFasich BaihaqiNo ratings yet
- Civil Demolition Work East of PL3 Rev01Document30 pagesCivil Demolition Work East of PL3 Rev01Venkadesh PeriathambiNo ratings yet
- Komatsu Excavator - PC200LC-8 (2011)Document14 pagesKomatsu Excavator - PC200LC-8 (2011)Ebied YoussefNo ratings yet
- Rotating Electric Machines LAP1 - DC Series Motors Flashcards - QuizletDocument22 pagesRotating Electric Machines LAP1 - DC Series Motors Flashcards - QuizletraniaNo ratings yet
- Qref Q400Document6 pagesQref Q400ReljaNo ratings yet
- FORD INYECCION FIESTA COURIER KA EEC V SFI 60 PINES CTA PDF Jag PDFDocument2 pagesFORD INYECCION FIESTA COURIER KA EEC V SFI 60 PINES CTA PDF Jag PDFjesus lozanoNo ratings yet
- Manual 730EDocument832 pagesManual 730ECELSON HENRIQUE GOMES DE RESENDENo ratings yet
- Bettis™ EHO Electro-Hydraulic Operator: Product Data SheetDocument15 pagesBettis™ EHO Electro-Hydraulic Operator: Product Data SheetCristobal HernandezNo ratings yet
- Lancia K Coupe' 97: Specific Vehicle Alarm Fitting Instructions Rev. 00Document1 pageLancia K Coupe' 97: Specific Vehicle Alarm Fitting Instructions Rev. 00Лешик ЯNo ratings yet
- Part CaterpilarDocument6 pagesPart CaterpilarFrans FerdinanNo ratings yet
- 3233F390 TabelaDocument1 page3233F390 TabelaOFFICE DANACNo ratings yet
- Development of Electric VehicleDocument20 pagesDevelopment of Electric VehicleIJRASETPublicationsNo ratings yet
- Syvecs LTD: BMW E92 M3Document5 pagesSyvecs LTD: BMW E92 M3RajibNo ratings yet
- Powerex Bombas de Vacio Vane Montado en Skid EspecificacionesDocument6 pagesPowerex Bombas de Vacio Vane Montado en Skid EspecificacionesHugovillarruelNo ratings yet
- BT PDFDocument60 pagesBT PDFDonnell FrancisNo ratings yet
- 2tz Fze 1 1Document21 pages2tz Fze 1 1andypress100% (1)
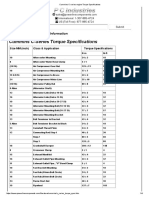
- Cummins C-Series Engine Torque SpecificationsDocument4 pagesCummins C-Series Engine Torque Specificationsheni50% (2)
- Introduction To Astrak - LennartsforsDocument29 pagesIntroduction To Astrak - LennartsforsHoward BellabyNo ratings yet
- Featuring: Technical CatalogDocument25 pagesFeaturing: Technical CatalogLuis Otavio TrindadeNo ratings yet
- Operations Management 18769 PDF PDFDocument278 pagesOperations Management 18769 PDF PDFneckoalNo ratings yet
- GS3369 RT Scissor Lift Repair ManualDocument269 pagesGS3369 RT Scissor Lift Repair ManualMarlin StraubNo ratings yet
- Design of Shafts CouplingsDocument45 pagesDesign of Shafts CouplingsRavi Teja100% (3)
- Waukesha Training Catalog - 2015Document26 pagesWaukesha Training Catalog - 2015ahmed hassan100% (1)
- Camion Articulado D400EDocument16 pagesCamion Articulado D400Edarwin100% (1)