You might also like
- Analitik Geometri Ders NotlariDocument99 pagesAnalitik Geometri Ders NotlariHilalAldemir50% (2)
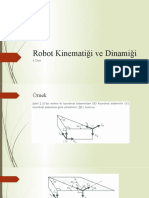
- Robot Kinematiği Ve Dinamiği Ders 6 07.04.2021Document9 pagesRobot Kinematiği Ve Dinamiği Ders 6 07.04.2021Alper AktaşNo ratings yet
- 7-Vektör Devre Kapalılık DenklemleriDocument10 pages7-Vektör Devre Kapalılık Denklemleriomertiryakimakine100% (1)
- Hafta 1Document30 pagesHafta 1vieraNo ratings yet
- Robot Tekniği - Endüstriyel Robotlar (2.hafta)Document19 pagesRobot Tekniği - Endüstriyel Robotlar (2.hafta)Mehmet Akif ErsoyNo ratings yet
- Makinateorisi 1Document53 pagesMakinateorisi 1ÇağrıNo ratings yet
- Robot Kinematigi 2Document67 pagesRobot Kinematigi 2Mehmet ÖzdenNo ratings yet
- ROBOT KOL TASARıMıDocument137 pagesROBOT KOL TASARıMıAhmet TaşNo ratings yet
- Robot Kinematigi 3Document39 pagesRobot Kinematigi 3Mehmet ÖzdenNo ratings yet
- Robotiğe Giriş FinalDocument2 pagesRobotiğe Giriş Finalismail demirciNo ratings yet
- Pekleşme KurallarıDocument20 pagesPekleşme KurallarıDenemeNo ratings yet
- CNC Eği̇ti̇mi̇ Ders NotlariDocument36 pagesCNC Eği̇ti̇mi̇ Ders NotlariNurican ErtuğrulNo ratings yet
- BiyokütleDocument169 pagesBiyokütleTuğçe YalçınNo ratings yet
- MekTit - Ders Notu - K2-1-Çok Serbestlik-Giriş - 9 SlaytDocument15 pagesMekTit - Ders Notu - K2-1-Çok Serbestlik-Giriş - 9 SlaytTaha SavacıNo ratings yet
- 2.1.1 DengelemeDocument44 pages2.1.1 DengelemeErciyes ÇeteciNo ratings yet
- Hasar Analizi 07 Sürünme HasarıDocument26 pagesHasar Analizi 07 Sürünme HasarıSerhat İpşirNo ratings yet
- Bölüm 2 Gerilme Ve Şekil Değiştirme Eksenel YüklemeDocument129 pagesBölüm 2 Gerilme Ve Şekil Değiştirme Eksenel YüklemeEmin KorkmazNo ratings yet
- Sayısal Analiz Bölüm-2 PDFDocument83 pagesSayısal Analiz Bölüm-2 PDFvoviniNo ratings yet
- Foto TemelleriDocument41 pagesFoto Temellerierolbuyuktas92No ratings yet
- Benzerlik Ve Model TeorisiDocument11 pagesBenzerlik Ve Model TeorisiHasan Murat SolmazNo ratings yet
- 3 - Sayisal Analizde Hata KavramiDocument35 pages3 - Sayisal Analizde Hata KavramiUmut EsenNo ratings yet
- iMALAT mÜHENDİSLİĞİ PDFDocument77 pagesiMALAT mÜHENDİSLİĞİ PDFandemirNo ratings yet
- 8051 Ve CDocument47 pages8051 Ve Ccafcaf890% (1)
- Yol AplikasyonuDocument56 pagesYol AplikasyonuofinanNo ratings yet
- Mukavemet-I. Yrd - Doç.dr. Akın AtaşDocument67 pagesMukavemet-I. Yrd - Doç.dr. Akın AtaşHazar AytulunNo ratings yet
- Malzemelerin Mekanik DavranışlarıDocument172 pagesMalzemelerin Mekanik DavranışlarıSalih BalcıNo ratings yet
- Makdin Vize1Document1 pageMakdin Vize1Muhittin SimsekNo ratings yet
- Elektrik Elektronik Ölçme KitabıDocument52 pagesElektrik Elektronik Ölçme Kitabıosman karaNo ratings yet
- Tobbeturocketry Roket Takimi On Tasarim RaporuDocument72 pagesTobbeturocketry Roket Takimi On Tasarim RaporuArşimet EğinNo ratings yet
- 3B Bilgisayar GrafikleriDocument11 pages3B Bilgisayar Grafiklerisahinerdem27100% (1)
- Uçuş Benzetimi ÖTR Raporu Gereksinimleri Euf6bDocument4 pagesUçuş Benzetimi ÖTR Raporu Gereksinimleri Euf6bSezer UğurluNo ratings yet
- MKN307-H2-Serbestlik DerecesiDocument24 pagesMKN307-H2-Serbestlik DerecesiErtan ŞahinNo ratings yet
- Sınıf Matematik Tam İsabet Soru BankasıDocument280 pagesSınıf Matematik Tam İsabet Soru BankasıÇözüm YayınlarıNo ratings yet
- Analitik Geometri Ders NotlariDocument99 pagesAnalitik Geometri Ders NotlariFurkan GümüşNo ratings yet
- İstanbul Teknik Üniversitesi Fen Bilimleri Enstitüsü: MAYIS 2002Document96 pagesİstanbul Teknik Üniversitesi Fen Bilimleri Enstitüsü: MAYIS 2002Yusuf Emre KılınçNo ratings yet
- Fixmevki 2Document67 pagesFixmevki 2Taylan BayarNo ratings yet
- Catia v5 Surface ModellingDocument199 pagesCatia v5 Surface Modellingnlk2wsNo ratings yet
- 2019 Ara ÇözDocument16 pages2019 Ara Çözkasim_arkin2707No ratings yet
- Ustun. Datum Donusumleri. Yildiz Teknik Universitesi-YLDocument97 pagesUstun. Datum Donusumleri. Yildiz Teknik Universitesi-YLhüseyin burak göktaşNo ratings yet
- SHGM Taninan Okul Mufredat Karsilastirma FormuDocument111 pagesSHGM Taninan Okul Mufredat Karsilastirma FormukeoxxNo ratings yet
- Dinamik Ders Notlari HazirlayanlarDocument76 pagesDinamik Ders Notlari Hazirlayanlaromernurullah2002No ratings yet
- Analitik Çözümlü 12345678910111213Document13 pagesAnalitik Çözümlü 12345678910111213Zero SakebiNo ratings yet
- Olcme Uyg YonergesiDocument26 pagesOlcme Uyg YonergesiGüneş AYDINNo ratings yet
- Analitik GeometriDocument9 pagesAnalitik GeometriZero SakebiNo ratings yet
- Gülsen Acar GüldamlasıDocument172 pagesGülsen Acar GüldamlasıEsma DeliceNo ratings yet
- Endüstrđyel Kaynak Robotlarinda Kullanilan Kaynak Parametrelerđnđn Kaynak Kalđtesđne Ve Nüfuzđyetđne Etkđsđnđn AraştirilmasiDocument116 pagesEndüstrđyel Kaynak Robotlarinda Kullanilan Kaynak Parametrelerđnđn Kaynak Kalđtesđne Ve Nüfuzđyetđne Etkđsđnđn AraştirilmasiLOLLNo ratings yet
- Robotik Kitabi PDFDocument580 pagesRobotik Kitabi PDFCüneytNo ratings yet
- FİZİK I, Liseler İçin, MEGSB Komisyon, İstanbul 1989Document234 pagesFİZİK I, Liseler İçin, MEGSB Komisyon, İstanbul 1989Gezen GezginNo ratings yet
- Endaze Çizimi Sorumluluk Sınavı (Eylül-2022)Document3 pagesEndaze Çizimi Sorumluluk Sınavı (Eylül-2022)honer827No ratings yet
- yokAcikBilim 345049Document87 pagesyokAcikBilim 345049denizturnafidanNo ratings yet
- Lojik Uygulamalar2Document130 pagesLojik Uygulamalar2Ates YakbeniNo ratings yet
- T.C Balikesir Üniversitesi Mühendislik Mimarlik Fakültesi MakinemühendisliğiDocument95 pagesT.C Balikesir Üniversitesi Mühendislik Mimarlik Fakültesi MakinemühendisliğiMehmetGörkemDemirNo ratings yet
- Balanssizlik Ve Rulman Arizasi Saha OrneDocument13 pagesBalanssizlik Ve Rulman Arizasi Saha OrnedaywalkeryNo ratings yet
- Hafta 1-2 Elektronik II Giris v3Document33 pagesHafta 1-2 Elektronik II Giris v3malatyabordoNo ratings yet
- AutocadDocument8 pagesAutocadHassan afghanNo ratings yet
- Betonarme Ii - Biro YöntemiDocument33 pagesBetonarme Ii - Biro YöntemiAdem Yılmaz100% (1)
- Sınıf Kimya Soru Bankası - OrnekDocument20 pagesSınıf Kimya Soru Bankası - OrnekZeynep Nida DuranNo ratings yet
- Çelik Yapılar I - Ders 6 - Eleman Tasarımı 2Document14 pagesÇelik Yapılar I - Ders 6 - Eleman Tasarımı 2İÜ İnşaat Mühendisliği BölümüNo ratings yet