You might also like
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- Lecture 4 - Introduction To Global Positioning SystemDocument40 pagesLecture 4 - Introduction To Global Positioning SystembuhlyunbarterNo ratings yet
- Outline: Combining GPS & Cellular Network Measurements For PositioningDocument9 pagesOutline: Combining GPS & Cellular Network Measurements For PositioningMuhammad Niyas N SNo ratings yet
- 8 Data CaptureDocument65 pages8 Data Capturemd abdullahNo ratings yet
- Avleen GPS 2Document27 pagesAvleen GPS 2saabi singhNo ratings yet
- Seminar On GPS: By, PruthwinDocument24 pagesSeminar On GPS: By, PruthwinPruthwinNo ratings yet
- Global Positioning System (GPS) : A Operators Guide To Use GPS Effectively As A Survey ToolDocument25 pagesGlobal Positioning System (GPS) : A Operators Guide To Use GPS Effectively As A Survey ToolTheyen NaidooNo ratings yet
- Principle of Functioning of DGPS & ETSDocument64 pagesPrinciple of Functioning of DGPS & ETSseshukvs100% (1)
- Global Positioning System: Introduction ToDocument58 pagesGlobal Positioning System: Introduction ToYasir Malik0% (1)
- Mod 5 SurveyingDocument281 pagesMod 5 SurveyingAa AaNo ratings yet
- Pasang SurutDocument32 pagesPasang SurutRomi OktavianusNo ratings yet
- Chap 2 GPSDocument41 pagesChap 2 GPSLayani KatinNo ratings yet
- GNSS/GPS BasicsDocument25 pagesGNSS/GPS BasicsSharfari MatNo ratings yet
- Amdl Intro To GPSDocument29 pagesAmdl Intro To GPSgaurang1111No ratings yet
- 480 PresentationDocument29 pages480 PresentationMariamNo ratings yet
- Navigation Systems and Their ImplementationDocument29 pagesNavigation Systems and Their ImplementationJustin RajaNo ratings yet
- GPS (Global Positioning System) & DGPS (Differential Global Positioning System)Document103 pagesGPS (Global Positioning System) & DGPS (Differential Global Positioning System)NoCopyrightTunesNo ratings yet
- Seminar On GPS: Part I Working of GPS/DGPS Part II Programming of GPSDocument43 pagesSeminar On GPS: Part I Working of GPS/DGPS Part II Programming of GPSNitesh KumarNo ratings yet
- Surveying Lecture Modified SurveyDocument27 pagesSurveying Lecture Modified SurveyManish S. SugandhiNo ratings yet
- Chapter 10 GPSDocument24 pagesChapter 10 GPSAnil BasnetNo ratings yet
- GPSDocument35 pagesGPSak721No ratings yet
- GPS Training2Document41 pagesGPS Training2Pitchaimuthu Mari PandiNo ratings yet
- MODULE 7 - Satellite Navigation Systems GPS GLONASS DGPSDocument64 pagesMODULE 7 - Satellite Navigation Systems GPS GLONASS DGPSgavin.vedder1980No ratings yet
- Dgps Survey For BWDBDocument34 pagesDgps Survey For BWDBShafiqul HasanNo ratings yet
- Introduction To Global Positioning Systems (GPS)Document28 pagesIntroduction To Global Positioning Systems (GPS)sanu81No ratings yet
- Samuel Dekyem: Ee 651Ws: Introduction To Spread Spectrum Instructor: Professor YaoDocument35 pagesSamuel Dekyem: Ee 651Ws: Introduction To Spread Spectrum Instructor: Professor Yaosamuel dekyemNo ratings yet
- Satellite Navigation (GPS)Document28 pagesSatellite Navigation (GPS)NAJA MOHAMEDNo ratings yet
- 480 GPS Tech PresentaationDocument12 pages480 GPS Tech PresentaationMurmuration AviationNo ratings yet
- Global Positioning System (GPS)Document41 pagesGlobal Positioning System (GPS)Isabella LagboNo ratings yet
- Shashwat Shriparv InfinitysoftDocument50 pagesShashwat Shriparv Infinitysoftshashwat2010No ratings yet
- Dr. Ahmed Said Eltrass: Global Positioning System (GPS)Document52 pagesDr. Ahmed Said Eltrass: Global Positioning System (GPS)Mina MounirNo ratings yet
- Global Positioning SystemDocument66 pagesGlobal Positioning SystemRamdas DevidasNo ratings yet
- DGPS 28oct, 2010 EdusatDocument28 pagesDGPS 28oct, 2010 EdusatsgrrscNo ratings yet
- GPS Basics v.1.6Document81 pagesGPS Basics v.1.6sorbisorbi100% (1)
- Global Positioning SystemsDocument34 pagesGlobal Positioning Systemsthupten tsundue100% (1)
- By: Sir Umair Rasheed: The University of LahoreDocument41 pagesBy: Sir Umair Rasheed: The University of LahoreSuman AgarwalNo ratings yet
- CE-321 Gps - Slides - EtcDocument129 pagesCE-321 Gps - Slides - EtcShubham BansalNo ratings yet
- INS-GPS PressDocument33 pagesINS-GPS PresstommihadityaNo ratings yet
- Introduction To Global Positioning SystemsDocument32 pagesIntroduction To Global Positioning SystemsMahamiNo ratings yet
- A Report On Global Positioning SystemDocument18 pagesA Report On Global Positioning SystemRahul WaliaNo ratings yet
- CVL111 LM2 5Document20 pagesCVL111 LM2 5GoggiNo ratings yet
- Unit 1.B. Space Based Positioning System: By. Piyush BhandariDocument17 pagesUnit 1.B. Space Based Positioning System: By. Piyush BhandariP K JainNo ratings yet
- Principles of Differential GPS, Surveying Methods and Integration With GISDocument26 pagesPrinciples of Differential GPS, Surveying Methods and Integration With GISSaurabh Suman100% (1)
- GSM (Global System For Mobile Communication) : Unit IIIDocument40 pagesGSM (Global System For Mobile Communication) : Unit IIIMerlin Linda GNo ratings yet
- GPS by Akash AdwaniDocument40 pagesGPS by Akash Adwanisolalasolala7No ratings yet
- Global Positioning System: Presented By: CGDocument21 pagesGlobal Positioning System: Presented By: CGskyrunmanNo ratings yet
- Lesson 8 - Gps Surveysr - SepeDocument16 pagesLesson 8 - Gps Surveysr - SepemassamicoNo ratings yet
- SIG05a GNSSDocument27 pagesSIG05a GNSSAbdul HelmiNo ratings yet
- Satellite Data and CommunicationDocument33 pagesSatellite Data and CommunicationkentmultanNo ratings yet
- DIS 11-12 W04 Lecture PDFDocument67 pagesDIS 11-12 W04 Lecture PDFEvangelista Mao0% (1)
- What Is It? - How Does It Work? - Errors and Accuracy - Ways To Maximize Accuracy - System ComponentsDocument43 pagesWhat Is It? - How Does It Work? - Errors and Accuracy - Ways To Maximize Accuracy - System ComponentsghasemighasemiNo ratings yet
- Lecture - 3 - Working Principle of GPSDocument67 pagesLecture - 3 - Working Principle of GPSdiptosarkarNo ratings yet
- Global Positioning SystemDocument117 pagesGlobal Positioning SystemSaurabh SumanNo ratings yet
- Global Navigation Satellite SystemDocument21 pagesGlobal Navigation Satellite SystemMike MSBNo ratings yet
- Gps SurveyingDocument34 pagesGps SurveyingsathyaNo ratings yet
- GPS FinalDocument44 pagesGPS Finalmdmoiz121No ratings yet
- Global Positioning: Technologies and PerformanceFrom EverandGlobal Positioning: Technologies and PerformanceRating: 5 out of 5 stars5/5 (1)
- Global Positioning Systems, Inertial Navigation, and IntegrationFrom EverandGlobal Positioning Systems, Inertial Navigation, and IntegrationRating: 1 out of 5 stars1/5 (1)
- Satellite Television: Analogue and Digital Reception TechniquesFrom EverandSatellite Television: Analogue and Digital Reception TechniquesRating: 2.5 out of 5 stars2.5/5 (3)
- فرجDocument66 pagesفرجMiDa AlaribyNo ratings yet
- 05 System Vulnerability 0909Document42 pages05 System Vulnerability 0909MiDa AlaribyNo ratings yet
- Summary Table pre-EXAMDocument10 pagesSummary Table pre-EXAMMiDa AlaribyNo ratings yet
- 07 Glonass Modernisation 0909Document12 pages07 Glonass Modernisation 0909MiDa AlaribyNo ratings yet
- 04 Augmentation Systems 0909Document29 pages04 Augmentation Systems 0909MiDa AlaribyNo ratings yet
- 03 Satellite Orbits & GPS Ephemerides 0909Document14 pages03 Satellite Orbits & GPS Ephemerides 0909MiDa AlaribyNo ratings yet
- 09 GPS Applications & Markets 1008Document22 pages09 GPS Applications & Markets 1008MiDa AlaribyNo ratings yet
- 06 GPS Modernisation 0909Document17 pages06 GPS Modernisation 0909MiDa AlaribyNo ratings yet
- Scanned Documents 1Document11 pagesScanned Documents 1MiDa AlaribyNo ratings yet
- Tutorial Week 2: 1. What Are The Characteristics of A Mobile Computing Environment?Document5 pagesTutorial Week 2: 1. What Are The Characteristics of A Mobile Computing Environment?saneel kumarNo ratings yet
- RF Absorber TDKDocument19 pagesRF Absorber TDKMOHSENNo ratings yet
- List of Radio Stations in Central LuzonDocument5 pagesList of Radio Stations in Central LuzonKirz SerranoNo ratings yet
- CMAX DM30 43 V53 - Mimo2 PDFDocument3 pagesCMAX DM30 43 V53 - Mimo2 PDFOrLand ChxNo ratings yet
- Radio Aids HomeworkDocument12 pagesRadio Aids HomeworkAnand PanditNo ratings yet
- Cit 655Document180 pagesCit 655Jenni Jenni JNo ratings yet
- Instruction Manual: VHF Marine TransceiverDocument92 pagesInstruction Manual: VHF Marine TransceivertehnicancomNo ratings yet
- FB 20 - EstDocument2 pagesFB 20 - EstLuzPrietoNo ratings yet
- 9A04501 Analog Communications7Document4 pages9A04501 Analog Communications7subbuNo ratings yet
- Radwin 5000 Ant RW-9061-2002Document2 pagesRadwin 5000 Ant RW-9061-2002Nguyen Xuan NhuNo ratings yet
- DVB-T / DVB-H Transmitter Measurements For Acceptance, Commission-Ing and Monitoring Application NoteDocument39 pagesDVB-T / DVB-H Transmitter Measurements For Acceptance, Commission-Ing and Monitoring Application NoteZahira Salsabilla SoemantriNo ratings yet
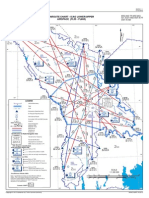
- H H H H: Enroute Chart - Icao Lower/Upper AIRSPACE (FL55 - FL660)Document1 pageH H H H: Enroute Chart - Icao Lower/Upper AIRSPACE (FL55 - FL660)Alexandru SamConstruct MazuruNo ratings yet
- How Does ZigBee Compare With Other Wireless StandardsDocument6 pagesHow Does ZigBee Compare With Other Wireless StandardsChirag MistryNo ratings yet
- IEEE802Document5 pagesIEEE802LoreNo ratings yet
- BLX Wireless Compatibility Frequency Bands Supplement BLX H8 (518-542 MHZ)Document3 pagesBLX Wireless Compatibility Frequency Bands Supplement BLX H8 (518-542 MHZ)JNo ratings yet
- Wireless Site Survey Checklist: Select Download FormatDocument4 pagesWireless Site Survey Checklist: Select Download FormatMichael Martin0% (1)
- Ofdm & QamDocument15 pagesOfdm & Qamnikky234No ratings yet
- Instant Dfs System PDFDocument4 pagesInstant Dfs System PDFMithilesh KumarNo ratings yet
- T007 Jun 7 2021Document217 pagesT007 Jun 7 2021rdpereirNo ratings yet
- Bab 8 Radio Wave PropagationDocument52 pagesBab 8 Radio Wave PropagationPuput oktariantiNo ratings yet
- 5G-Security-and-Privacy-A-Research-Roadmap - CCCDocument12 pages5G-Security-and-Privacy-A-Research-Roadmap - CCCbsrpropNo ratings yet
- GSM-EDGE Repeater Manual Preliminary Version 2Document265 pagesGSM-EDGE Repeater Manual Preliminary Version 2divxns100% (1)
- Radio PDFDocument1 pageRadio PDFluis eduardo corzo enriquezNo ratings yet
- Honeywell Onewireless™ Field Device Access Point Specification Release R320 Ow03-650-320, June 2020Document10 pagesHoneywell Onewireless™ Field Device Access Point Specification Release R320 Ow03-650-320, June 2020Salah HamoNo ratings yet
- Lecture-1 - Wireless + Mobile Communications - Cellular System Design PrinciplesDocument49 pagesLecture-1 - Wireless + Mobile Communications - Cellular System Design Principlesdrillonit2428No ratings yet
- Prop Models MatlabDocument18 pagesProp Models Matlabkoncypike100% (1)
- Radio Frequency - Wikipedia, The Free EncyclopediaDocument3 pagesRadio Frequency - Wikipedia, The Free EncyclopediaAlina MariaNo ratings yet
- Antenna Systems For Vehicle-To-Everything (V2X) Communication at 5 .9 GHZ Considering The Vehicle BodyDocument236 pagesAntenna Systems For Vehicle-To-Everything (V2X) Communication at 5 .9 GHZ Considering The Vehicle BodySaif KamalNo ratings yet
- Huawei ACPDocument18 pagesHuawei ACPmlmb tuhNo ratings yet
- A Switchable-Frequency Slot-Ring Antenna Element For Designing A Reconfigurable ArrayDocument5 pagesA Switchable-Frequency Slot-Ring Antenna Element For Designing A Reconfigurable ArrayloganathanNo ratings yet