You might also like
- điệnDocument21 pagesđiệnViệt Anh Nguyễn HuyNo ratings yet
- Bài 5Document5 pagesBài 5nguyễn namNo ratings yet
- Chương 4 Hệ TDD xoay chiều v2Document88 pagesChương 4 Hệ TDD xoay chiều v2Huy Quoc NguyenNo ratings yet
- Tài liệu KTĐ cực bá vjp proDocument5 pagesTài liệu KTĐ cực bá vjp proDung TrầnNo ratings yet
- Do An Truyen Dong Dien Tinh Toan Va Dieu Chinh Toc Do Dong Co Khong Dong Bo Ba PhaDocument44 pagesDo An Truyen Dong Dien Tinh Toan Va Dieu Chinh Toc Do Dong Co Khong Dong Bo Ba Phaviet nguyenNo ratings yet
- L01 BT02 NguyenThaiAn 2210169Document16 pagesL01 BT02 NguyenThaiAn 2210169tonynguyen0417No ratings yet
- Tailieuxanh Giai Tich Mach Do Quoc Tuan GTM Chuong 2 1 Mach Xac Lap Dieu Hoa Cuuduongthancong Com 9579 6257 1175Document21 pagesTailieuxanh Giai Tich Mach Do Quoc Tuan GTM Chuong 2 1 Mach Xac Lap Dieu Hoa Cuuduongthancong Com 9579 6257 1175Thang dducNo ratings yet
- Tailieuxanh Chuong 7 PPTX 1375Document35 pagesTailieuxanh Chuong 7 PPTX 1375NguyênChấnLụcNo ratings yet
- Phần02Document11 pagesPhần02Hào ĐinhNo ratings yet
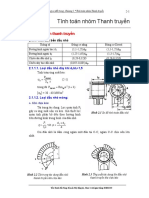
- Ch2-Tinh Toan Nhom Thanh TruyenDocument9 pagesCh2-Tinh Toan Nhom Thanh TruyenLong PhanNo ratings yet
- Bao Cao Cuoi Ky Mo PhongDocument19 pagesBao Cao Cuoi Ky Mo PhongNhân Hồ Thức100% (1)
- DC DCDocument176 pagesDC DCĐINH ANH TÙNGNo ratings yet
- Tomtat VRQuayDocument9 pagesTomtat VRQuaythanh19752009No ratings yet
- 51 - Nguyễn Anh Thư - 20181775Document41 pages51 - Nguyễn Anh Thư - 20181775Thư NguyễnNo ratings yet
- Thi vấn đáp HTĐĐCDocument23 pagesThi vấn đáp HTĐĐCTrần Đức ThắngNo ratings yet
- Chi Tiết MáyDocument20 pagesChi Tiết MáyNgọc TùngNo ratings yet
- Thiết kế bộ biến tần truyền thông ba pha điều khiển động cơ (download tai tailieutuoi.com)Document10 pagesThiết kế bộ biến tần truyền thông ba pha điều khiển động cơ (download tai tailieutuoi.com)Duy VũNo ratings yet
- Thay Vu Tuan Anh.công Thức Vật LýDocument15 pagesThay Vu Tuan Anh.công Thức Vật Lýbwh17188No ratings yet
- PTVP - Laplace - - Hàm truyền (chương 2 Mô hình toán học của hệ thống ĐKTĐ)Document82 pagesPTVP - Laplace - - Hàm truyền (chương 2 Mô hình toán học của hệ thống ĐKTĐ)22a3101d0024No ratings yet
- Chuong 4Document25 pagesChuong 4api-3742225No ratings yet
- Phuong Phap Giai Va Cac Bai Toan Co Vat Ran 8394Document9 pagesPhuong Phap Giai Va Cac Bai Toan Co Vat Ran 8394truyen_qnNo ratings yet
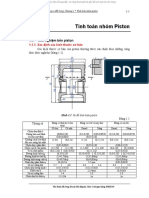
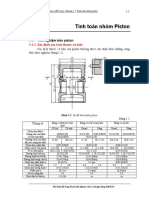
- ch1 Tinh Toan Nhom Piston 3378Document7 pagesch1 Tinh Toan Nhom Piston 3378Kiều TháiNo ratings yet
- PistonDocument9 pagesPistonnghia1998 thoivanNo ratings yet
- Chuong 3-Truyen Dong Dien - 2020Document48 pagesChuong 3-Truyen Dong Dien - 2020Lê UyênNo ratings yet
- - Độ trơn của điều chỉnh tốc độDocument38 pages- Độ trơn của điều chỉnh tốc độnam nguyenNo ratings yet
- NhápDocument3 pagesNhápTùng Nông VănNo ratings yet
- Nguyễn Ngọc Đức 20028571 BTT PDFDocument17 pagesNguyễn Ngọc Đức 20028571 BTT PDFĐức Nguyễn NgọcNo ratings yet
- Bai Tap Dao Dong&songDocument20 pagesBai Tap Dao Dong&songAlex TrầnNo ratings yet
- DATDDDocument9 pagesDATDDThị Mỹ Duyên PhạmNo ratings yet
- btl thầy thanhDocument21 pagesbtl thầy thanhLong Vũ DuyNo ratings yet
- Tìm hiểu về vòng ngắn mạch chống rungDocument6 pagesTìm hiểu về vòng ngắn mạch chống rungAnh Trịnh TuấnNo ratings yet
- Báo Cáo Chuyên Đề: Ngành: Công Nghệ Ktđk&Tđh CHUYÊN NGÀNH: Tự động hóa và Điều khiển TBĐCN HỌC PHẦN: Truyền động điện 2Document17 pagesBáo Cáo Chuyên Đề: Ngành: Công Nghệ Ktđk&Tđh CHUYÊN NGÀNH: Tự động hóa và Điều khiển TBĐCN HỌC PHẦN: Truyền động điện 2SƠnNo ratings yet
- Pbl2 Thuyết MinhDocument47 pagesPbl2 Thuyết MinhUPSIDE-DOWNNo ratings yet
- Bao Cao Thi Nghiem Truyen Dong Dien Phan Ly ThuyetDocument8 pagesBao Cao Thi Nghiem Truyen Dong Dien Phan Ly ThuyetĐặng Cao MẫnNo ratings yet
- Thanh HoaDocument8 pagesThanh HoaPhúc Hải NguyễnNo ratings yet
- HƯỚNG DẪN BÀI TẬP LỚN PHẦN 3.2Document3 pagesHƯỚNG DẪN BÀI TẬP LỚN PHẦN 3.2Thành NguyễnNo ratings yet
- CH3 Transient Stability - Part 2 Equal Area CriterionDocument31 pagesCH3 Transient Stability - Part 2 Equal Area CriterionNguyễn Đình TuấnNo ratings yet
- De Cuong 12 HK1 2324Document23 pagesDe Cuong 12 HK1 2324Lee SatoNo ratings yet
- 84ce7 45420Document7 pages84ce7 45420lehoanghienlongNo ratings yet
- Đặc Tính Cơ Của Động Cơ Không Đồng Bộ (ĐK)Document13 pagesĐặc Tính Cơ Của Động Cơ Không Đồng Bộ (ĐK)sunhuynh0% (1)
- BÀI GIẢNG - Ổn Định Hệ Thống Điện (TS. Lê Vân)Document79 pagesBÀI GIẢNG - Ổn Định Hệ Thống Điện (TS. Lê Vân)Văn TàiNo ratings yet
- ĐO ÁP SUẤTDocument6 pagesĐO ÁP SUẤTTRÂN MAI NGỌCNo ratings yet
- Đ Án TkeDocument37 pagesĐ Án TkeQuang MInh BùiNo ratings yet
- Quà Tặng Cuộc Sống PHY002Document2 pagesQuà Tặng Cuộc Sống PHY002lmaoggvn1234567890No ratings yet
- Tính toán băng tải động cơDocument6 pagesTính toán băng tải động cơNguyễn Huy ToànNo ratings yet
- Nguyen Ngoc Duc 20028571 BTC2Document14 pagesNguyen Ngoc Duc 20028571 BTC2Đức Nguyễn NgọcNo ratings yet
- HanhViCoNHiet VIIDocument52 pagesHanhViCoNHiet VIISơnNo ratings yet
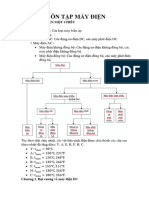
- ÔN TẬP MÁY ĐIỆNDocument11 pagesÔN TẬP MÁY ĐIỆN22142124No ratings yet
- 17902.Công Thức Vật Lý 12 Cả Năm (Dhung Yếu Đang)Document4 pages17902.Công Thức Vật Lý 12 Cả Năm (Dhung Yếu Đang)hunghayho2007No ratings yet
- May Dien Hung 4886Document90 pagesMay Dien Hung 4886Trưởng TrầnNo ratings yet
- AE - I. Cac Khai Niem Co BanDocument90 pagesAE - I. Cac Khai Niem Co Bantuangola12No ratings yet
- Chuong 3Document53 pagesChuong 3le thanhNo ratings yet
- Nguyễn Trọng Hiếu-421H0360Document12 pagesNguyễn Trọng Hiếu-421H0360Nguyễn Trọng HiếuNo ratings yet
- Bai 1 - Dieu Khien He Phi TuyenDocument23 pagesBai 1 - Dieu Khien He Phi TuyenTamtamTuNo ratings yet
- Te4870-Khidongluchoccoban 3.8mDocument278 pagesTe4870-Khidongluchoccoban 3.8mnguyen thanhNo ratings yet
- Bai 2Document5 pagesBai 2Phan Xuân TiếnNo ratings yet
- 4. CON LẮC THUẬN NGHỊCH PDFDocument6 pages4. CON LẮC THUẬN NGHỊCH PDFHoàng Long BùiNo ratings yet
- Chapter 3. Transient Stability - Part 1Document24 pagesChapter 3. Transient Stability - Part 1Nguyễn Đình TuấnNo ratings yet
- Chuong 1 - 02-2022 SVDocument8 pagesChuong 1 - 02-2022 SVNguyễn Đình TuấnNo ratings yet
- File BT 2Document28 pagesFile BT 2Nguyễn Đình TuấnNo ratings yet
- CH3 Transient Stability - Part 2 Equal Area CriterionDocument31 pagesCH3 Transient Stability - Part 2 Equal Area CriterionNguyễn Đình TuấnNo ratings yet
- Ổn Định Tỉnh: Steady-state stability (small disturbance)Document27 pagesỔn Định Tỉnh: Steady-state stability (small disturbance)Nguyễn Đình TuấnNo ratings yet