You might also like
- CAT C32 RNY Series Maintenance Interval ScheduleDocument3 pagesCAT C32 RNY Series Maintenance Interval Scheduleharikrishnanpd3327No ratings yet
- Jones Vectors and MatricesDocument3 pagesJones Vectors and MatricesfawazmoussellyNo ratings yet
- Fundamentals of solid structureDocument24 pagesFundamentals of solid structuredapp_706085No ratings yet
- A10v RexrothDocument3 pagesA10v RexrothHidroil Neuquen Srl100% (1)
- Shop Manual Engine 12V 140e PDFDocument601 pagesShop Manual Engine 12V 140e PDFHarry Wart Wart100% (3)
- 76 Going To The Hairdresser CanDocument13 pages76 Going To The Hairdresser CanOlga AmyNo ratings yet
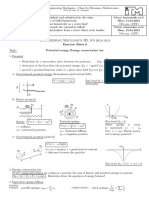
- EMIII Sheet 04 - StudlsgDocument11 pagesEMIII Sheet 04 - Studlsgdapp_706085No ratings yet
- Orbital Elements Analysis Using MATLABDocument14 pagesOrbital Elements Analysis Using MATLABmanjunathNo ratings yet
- Velocity AnalysisDocument12 pagesVelocity Analysisniaz kilamNo ratings yet
- Problems m2 PDFDocument7 pagesProblems m2 PDFparesh kumar sahooNo ratings yet
- EM PracticalsDocument22 pagesEM PracticalsRam PanditNo ratings yet
- InorgChem I L03Document54 pagesInorgChem I L03유지인No ratings yet
- N - Body Problem: L1 A3-401 - Newton's Law of GravitationDocument22 pagesN - Body Problem: L1 A3-401 - Newton's Law of Gravitationudayang5330No ratings yet
- Symmetry and Point Group Theory 260912Document45 pagesSymmetry and Point Group Theory 260912Suhada Sutajy100% (1)
- Planar Kinematics of A Rigid BodyDocument13 pagesPlanar Kinematics of A Rigid BodyMagicWand2No ratings yet
- Atomic Units: Appendix ADocument14 pagesAtomic Units: Appendix AnamitaNo ratings yet
- Lecture 14 B8 BDocument20 pagesLecture 14 B8 BInformative ChannelNo ratings yet
- Rotational Mechanics (NEET)Document45 pagesRotational Mechanics (NEET)Ram JiNo ratings yet
- The Two-Body Problem: Orbital MechanicsDocument23 pagesThe Two-Body Problem: Orbital MechanicsBellatrixMacabreNo ratings yet
- Plane Motion: Analysis of A Rigid Body in Translation, RotationDocument51 pagesPlane Motion: Analysis of A Rigid Body in Translation, RotationDaniela ParNo ratings yet
- Three-Dimensional Kinematics of Rigid Bodies: Hiroki OkuboDocument2 pagesThree-Dimensional Kinematics of Rigid Bodies: Hiroki OkuboViraj GaonkarNo ratings yet
- Homework2 2010 PDFDocument2 pagesHomework2 2010 PDFanaklembah@ScribdNo ratings yet
- The Two-Body Problem: Orbital MechanicsDocument31 pagesThe Two-Body Problem: Orbital MechanicsBellatrixMacabreNo ratings yet
- Lecture L16 - Central Force Motion: Orbits: Energy IntegralDocument8 pagesLecture L16 - Central Force Motion: Orbits: Energy IntegralKRITANTNo ratings yet
- Central Force Motion SolutionDocument15 pagesCentral Force Motion SolutionSaroj ShahNo ratings yet
- D Dynamics: Lecture Notes 05: Kinematics of The Rigid Body Rigid BodyDocument15 pagesD Dynamics: Lecture Notes 05: Kinematics of The Rigid Body Rigid BodyKish ShenoyNo ratings yet
- Symmetry and Point Groups: A. Symmetry Is Present in Nature and in Human CultureDocument17 pagesSymmetry and Point Groups: A. Symmetry Is Present in Nature and in Human CulturewwhyttaNo ratings yet
- Planar Kinematics of A Rigid Body: Ir. Dr. Mohd Noor Arib Bin MD RejabDocument23 pagesPlanar Kinematics of A Rigid Body: Ir. Dr. Mohd Noor Arib Bin MD RejabYipNo ratings yet
- Engineering Mechanics Homework TipsDocument7 pagesEngineering Mechanics Homework Tipsdapp_706085No ratings yet
- Partition Function: Discrete or Continuous States: Kristine Mae R. Carnicer Phys 251: Statistical Mechanics Assign #2Document3 pagesPartition Function: Discrete or Continuous States: Kristine Mae R. Carnicer Phys 251: Statistical Mechanics Assign #2Kristine Rodriguez-CarnicerNo ratings yet
- MAE462 Orbital Mechanics 3D Coordinate System Transformation NotesDocument31 pagesMAE462 Orbital Mechanics 3D Coordinate System Transformation NotesRyan KarnsNo ratings yet
- LectureNote6 Kinematic AnalysisDocument24 pagesLectureNote6 Kinematic Analysisabdullahgocer1997No ratings yet
- Pix4D Yaw Pitch Roll Omega To Phi Kappa Angles and ConversionDocument4 pagesPix4D Yaw Pitch Roll Omega To Phi Kappa Angles and ConversionRajnish MalikNo ratings yet
- ch4 PDFDocument123 pagesch4 PDFPaula MartínezNo ratings yet
- Navigation Equations in the ECEF FrameDocument17 pagesNavigation Equations in the ECEF FrameAhmad D. HunzaiNo ratings yet
- 1997 AL App MathDocument7 pages1997 AL App MathDaniel TamNo ratings yet
- Mechanics Solutions 1Document3 pagesMechanics Solutions 1Argh AaarghNo ratings yet
- Ncert Solutions Class 11 Physics Chapter 7 System of Particles and Rotational Motion 0Document43 pagesNcert Solutions Class 11 Physics Chapter 7 System of Particles and Rotational Motion 0Aelina VermaNo ratings yet
- NCERT 15may Chapter 14 OscillationsDocument26 pagesNCERT 15may Chapter 14 OscillationshaikukkkNo ratings yet
- Conical Swing of A Pendulum and Centripetal ForcesDocument7 pagesConical Swing of A Pendulum and Centripetal ForcesAlves OaNo ratings yet
- Rigid Body Dynamics - Chap 16Document60 pagesRigid Body Dynamics - Chap 16Na2ryNo ratings yet
- H3D 021Document3 pagesH3D 0217202aminNo ratings yet
- Class 7, Thursday, September 22, 2016: Circular MotionDocument13 pagesClass 7, Thursday, September 22, 2016: Circular MotionWanjiku MwangiNo ratings yet
- Lecture Notes - DynamicsDocument29 pagesLecture Notes - DynamicsFELIX KEUYANo ratings yet
- ps5 2023Document2 pagesps5 2023Kalua BhaiNo ratings yet
- Relativistic KinematicsDocument8 pagesRelativistic KinematicsArafat FaniNo ratings yet
- Planar kinematics of rigid bodiesDocument29 pagesPlanar kinematics of rigid bodiesDivnesh Lingam100% (1)
- Pfall2018a - EXtraDocument9 pagesPfall2018a - EXtraIjaz Talib0% (1)
- MechanicsDocument105 pagesMechanicsBeesam Ramesh KumarNo ratings yet
- Orbital Position As A Function of TimeDocument48 pagesOrbital Position As A Function of TimeBellatrixMacabreNo ratings yet
- Ends em 2021Document2 pagesEnds em 2021Hriday MittalNo ratings yet
- ProblemsDocument19 pagesProblemsManu SharmaNo ratings yet
- Ph.D. Qualifying Examination Department of Physics and Astronomy Wayne State UniversityDocument7 pagesPh.D. Qualifying Examination Department of Physics and Astronomy Wayne State UniversityjonsNo ratings yet
- Ph.D. Qualifying Examination Department of Physics and Astronomy Wayne State UniversityDocument7 pagesPh.D. Qualifying Examination Department of Physics and Astronomy Wayne State UniversityjonsNo ratings yet
- 2d Kinematics of RbodyDocument22 pages2d Kinematics of RbodyNurul AsyilahNo ratings yet
- Class 11 - Physics - Systems of Particles and Rotational MotionDocument53 pagesClass 11 - Physics - Systems of Particles and Rotational Motioni eat kneecapsNo ratings yet
- Converting Orbital Elements and Propagating OrbitDocument50 pagesConverting Orbital Elements and Propagating OrbitmanoNo ratings yet
- LEC. (1) - Kinematics of Rigid Bodies-Definitions-Translation-Rotational Motion-ExamplesDocument7 pagesLEC. (1) - Kinematics of Rigid Bodies-Definitions-Translation-Rotational Motion-ExamplesfadyNo ratings yet
- Lecture Notes 19: Lorentz Transformation of Electromagnetic Fields (Slight Return)Document18 pagesLecture Notes 19: Lorentz Transformation of Electromagnetic Fields (Slight Return)Najrul IslamNo ratings yet
- Group Theory Explains Molecular SymmetryDocument204 pagesGroup Theory Explains Molecular SymmetryDhieka NopiharguNo ratings yet
- NCERT Solutions For Class 11 Physics Chapter 14 OscillationsDocument24 pagesNCERT Solutions For Class 11 Physics Chapter 14 Oscillationsaniruddha deshpandeNo ratings yet
- Chemistry 21b Spectroscopy - Lecture # 5: Rotation of Polyatomic MoleculesDocument9 pagesChemistry 21b Spectroscopy - Lecture # 5: Rotation of Polyatomic MoleculesMddl2aNo ratings yet
- Kinematics of Particles:: Space Curvilinear MotionDocument14 pagesKinematics of Particles:: Space Curvilinear MotionLady MendozaNo ratings yet
- Engineering Mechanics Homework TipsDocument7 pagesEngineering Mechanics Homework Tipsdapp_706085No ratings yet
- EMIII Sheet 06 - StudlsgDocument9 pagesEMIII Sheet 06 - Studlsgdapp_706085No ratings yet
- EMIII Sheet 08 - StudlsgDocument8 pagesEMIII Sheet 08 - Studlsgdapp_706085No ratings yet
- KSRI Hiwi2019Document1 pageKSRI Hiwi2019dapp_706085No ratings yet
- (9783110544442 - Rigid Body Dynamics) The Creators of Rigid Body DynamicsDocument7 pages(9783110544442 - Rigid Body Dynamics) The Creators of Rigid Body Dynamicsdapp_706085No ratings yet
- Combustion Part 03Document5 pagesCombustion Part 03dapp_706085No ratings yet
- Mechanical Design 1.2Document135 pagesMechanical Design 1.2dapp_706085No ratings yet
- 19J032 Internship - Proposal - Hydrogen - N45Document1 page19J032 Internship - Proposal - Hydrogen - N45dapp_706085No ratings yet
- Some Fundamental Definitions and Phenomena: Chemical EnergyDocument17 pagesSome Fundamental Definitions and Phenomena: Chemical Energydapp_706085No ratings yet
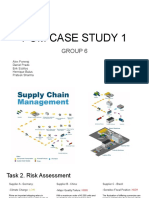
- Pom Case Study 1: Group 6Document20 pagesPom Case Study 1: Group 6dapp_706085No ratings yet
- Lecture Notes MSE I Chapter II 19102 GVVDocument17 pagesLecture Notes MSE I Chapter II 19102 GVVdapp_706085No ratings yet
- POM Case Study 1Document3 pagesPOM Case Study 1dapp_706085No ratings yet
- Ignition Processes: 11.1 Simplified Semenov Analysis of Thermal ExplosionsDocument3 pagesIgnition Processes: 11.1 Simplified Semenov Analysis of Thermal Explosionsdapp_706085No ratings yet
- Chemical Kinetics: 5.1 Rate Laws and Reaction OrdersDocument25 pagesChemical Kinetics: 5.1 Rate Laws and Reaction Ordersdapp_706085No ratings yet
- Measurement and Control SystemsDocument170 pagesMeasurement and Control Systemsdapp_706085No ratings yet
- 1 Linear Algebra: 1 K 1 1 K K 1 KDocument3 pages1 Linear Algebra: 1 K 1 1 K K 1 Kdapp_706085No ratings yet
- Ergo PresentDocument7 pagesErgo PresentFan ZNo ratings yet
- R55 R-Series 60 HZ FinalDocument2 pagesR55 R-Series 60 HZ FinalCelso Fernandes BentoNo ratings yet
- Syllabus: For Probability and StatisticsDocument2 pagesSyllabus: For Probability and Statisticsshubham raj laxmiNo ratings yet
- Heat EnginesDocument4 pagesHeat EnginesZaib RehmanNo ratings yet
- Laguna Kosmetik MC1 PlusDocument2 pagesLaguna Kosmetik MC1 PlusLaguna Karaoke TarakanNo ratings yet
- 4 6023697383601211598 PDFDocument232 pages4 6023697383601211598 PDFmahshid kianiNo ratings yet
- Kinematic Structure of Machine ToolsDocument23 pagesKinematic Structure of Machine ToolswagoheNo ratings yet
- Acknowledgement Master Thesis SampleDocument7 pagesAcknowledgement Master Thesis Samplebk3q07k5100% (2)
- Faren Buildcon Plasto ReadyDocument1 pageFaren Buildcon Plasto ReadyFaren TradersNo ratings yet
- Corrosion MonitoringDocument80 pagesCorrosion Monitoring이선엽86% (7)
- New Business Quarter: Mintmade DesignsDocument15 pagesNew Business Quarter: Mintmade DesignsKaleigh ForrestNo ratings yet
- 12 Gold 4 - C3 EdexcelDocument13 pages12 Gold 4 - C3 EdexcelShwan HasanNo ratings yet
- Activity 3 GlobalizationDocument3 pagesActivity 3 GlobalizationLuis VillalobosNo ratings yet
- American Hospital Supply Corporation Case Study-Surojit SahaDocument6 pagesAmerican Hospital Supply Corporation Case Study-Surojit Sahasurojitsaha15094No ratings yet
- 3014 LED PLW3014CA Series: Product DatasheetDocument14 pages3014 LED PLW3014CA Series: Product DatasheetfaberjetNo ratings yet
- Muet Paper 3 (Reading) Trial 2019Document13 pagesMuet Paper 3 (Reading) Trial 2019PRAKASH100% (1)
- 3x Anglais Ecran-4Document4 pages3x Anglais Ecran-4EMRE KAAN USTANo ratings yet
- Everything an Employee Experiences at WorkDocument1 pageEverything an Employee Experiences at WorkAnushka Seth BBA2021MCNo ratings yet
- 11 Mindfuck Tactics Used by Abusers and Cult LeadersDocument3 pages11 Mindfuck Tactics Used by Abusers and Cult LeadersIgnotum Umbra100% (1)
- EQUIPMENT DATA SHEET Self Propelled Skidding SystemsDocument15 pagesEQUIPMENT DATA SHEET Self Propelled Skidding Systemsmathew1965No ratings yet
- Grade 9 q3 Module 1 EditedDocument15 pagesGrade 9 q3 Module 1 EditedOnil PagutayaoNo ratings yet
- Ceng-280 Microprocessors: Programming Project 2Document6 pagesCeng-280 Microprocessors: Programming Project 2kwstas vrotzisNo ratings yet
- Coursebook Analysis Jeremy Harmer How To Teach English Pearson 2007Document1 pageCoursebook Analysis Jeremy Harmer How To Teach English Pearson 2007Jamie Leigh McGeorgeNo ratings yet
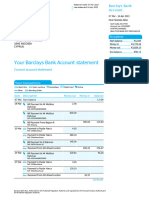
- Barclays Bank UPDATEDocument32 pagesBarclays Bank UPDATEAbdul wahidNo ratings yet
- GLA University - Student's No Dues DetailsDocument2 pagesGLA University - Student's No Dues DetailsRishi JakarNo ratings yet
- Science: Quarter 4 - Module 6: Cycling of Materials in The EcosystemDocument20 pagesScience: Quarter 4 - Module 6: Cycling of Materials in The EcosystemCamille Sabal100% (1)