You might also like
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1No ratings yet
- A Dec 200 Service Manual PDFDocument126 pagesA Dec 200 Service Manual PDFoscar100% (1)
- XR Calculation LearnersDocument4 pagesXR Calculation LearnersDaniel ThomasNo ratings yet
- ZAPI AC-2 ManualDocument72 pagesZAPI AC-2 ManualDawid MleczkoNo ratings yet
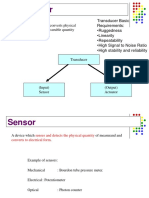
- TransducerDocument70 pagesTransducersmcoolguy68100% (1)
- Zapi Sem-X ManualDocument40 pagesZapi Sem-X Manualkabir babyNo ratings yet
- TLE7 CSS Mod4 Preparing and Interpreting Technical Drawing Version3 2Document42 pagesTLE7 CSS Mod4 Preparing and Interpreting Technical Drawing Version3 2George Garcia83% (12)
- General Physics Lab Report: Faculty of Engineering and TechnologyDocument19 pagesGeneral Physics Lab Report: Faculty of Engineering and TechnologyIzaNo ratings yet
- EKS83 Service Manual SkyAzulDocument30 pagesEKS83 Service Manual SkyAzulM Refai100% (2)
- IST-099-1 - ITM509 - HW - SW - Instructions Rev-29301 PDFDocument173 pagesIST-099-1 - ITM509 - HW - SW - Instructions Rev-29301 PDFVictor LeónNo ratings yet
- Potentiometer 1Document19 pagesPotentiometer 1Kritika GuptaNo ratings yet
- Resistance and Ohm's LawDocument10 pagesResistance and Ohm's Lawm15148870No ratings yet
- EE413 Lecture 4Document24 pagesEE413 Lecture 4Veena MundaNo ratings yet
- Resistive PotentiometerDocument7 pagesResistive PotentiometerSouradeep HalderNo ratings yet
- 2-Unit-I PPTs-02-02-2021 (02-Feb-2021) Material - II - 02-Feb-2021 - Resistive-Sensors-AnalogDocument45 pages2-Unit-I PPTs-02-02-2021 (02-Feb-2021) Material - II - 02-Feb-2021 - Resistive-Sensors-Analognatsu dragneelNo ratings yet
- Electricity - Part 2Document22 pagesElectricity - Part 2Anonymous CommentatorNo ratings yet
- Electrical Circuits Lecture 6,7,8 SummaryDocument5 pagesElectrical Circuits Lecture 6,7,8 SummaryRaghad Al-ShaikhNo ratings yet
- Marathon Session On TransducersDocument141 pagesMarathon Session On TransducersSamarthNo ratings yet
- Resistive Transducers: Instructor: DR Alivelu M ParimiDocument28 pagesResistive Transducers: Instructor: DR Alivelu M ParimiSaketh DahagamNo ratings yet
- Transducers: by A Device Called "Secondary Transducer"Document26 pagesTransducers: by A Device Called "Secondary Transducer"thumatimadhusudhan0% (1)
- CH 3 Sensors and Applications IDocument20 pagesCH 3 Sensors and Applications Idagmawi gebrewoldNo ratings yet
- 'Physics Laws 2nd Term 2017' PDFDocument7 pages'Physics Laws 2nd Term 2017' PDFBasant HanyNo ratings yet
- EE413 Lecture 6Document22 pagesEE413 Lecture 6Veena MundaNo ratings yet
- Semi ConductorsDocument8 pagesSemi Conductorsmadiha76y8No ratings yet
- Sanad ElectricityDocument13 pagesSanad ElectricityAli SalamehNo ratings yet
- Current, Resistance and DC CircuitsDocument40 pagesCurrent, Resistance and DC CircuitsabeeNo ratings yet
- TransducerDocument34 pagesTransducerVicky VishwakarmaNo ratings yet
- 7 - Displacement - Position - Proximity - Sensor IDocument32 pages7 - Displacement - Position - Proximity - Sensor IKARTHIK S SNo ratings yet
- 3.basics of Strain GaugeDocument20 pages3.basics of Strain GaugeRaunaq SinghNo ratings yet
- 3rd Classification of SensorsDocument22 pages3rd Classification of SensorsZubair AhmedNo ratings yet
- Chapter 3Document3 pagesChapter 3Sanat GuptaNo ratings yet
- Displacement, and Proximity Sensor: PositionDocument31 pagesDisplacement, and Proximity Sensor: PositionapuroopmNo ratings yet
- S PDFDocument90 pagesS PDFAmritha V100% (1)
- Module-5 Extra Material (Power Converters)Document69 pagesModule-5 Extra Material (Power Converters)NamiraNo ratings yet
- Eureka - STM129 Final Term ReviewerDocument6 pagesEureka - STM129 Final Term ReviewerAMANIE H IBRAHIMNo ratings yet
- Project Name: Made by Team Leader Nikhil Gupta Team Member Karan Singh Kush Manhotra Himanshu Bhim Prakash Deepak RawatDocument31 pagesProject Name: Made by Team Leader Nikhil Gupta Team Member Karan Singh Kush Manhotra Himanshu Bhim Prakash Deepak Rawatnikhilgupta117No ratings yet
- Physics Tutorial Terms and Formulas For Electricity: 1. ElectrostaticsDocument3 pagesPhysics Tutorial Terms and Formulas For Electricity: 1. ElectrostaticsCheuk Kai ChanNo ratings yet
- Review Atc IVDocument13 pagesReview Atc IVArsenio MalapitNo ratings yet
- Basic Sensors and PrinciplesDocument80 pagesBasic Sensors and Principlesmparanthaman2No ratings yet
- H7128 SISS Lecture NotesDocument22 pagesH7128 SISS Lecture NotesToby KellyNo ratings yet
- LVDTDocument11 pagesLVDTShambhavi VarmaNo ratings yet
- Analog Electrical Devices and MeasurementsDocument21 pagesAnalog Electrical Devices and MeasurementsGabriel MarzinottoNo ratings yet
- Measurement of ResistanceDocument96 pagesMeasurement of ResistancePraveena BNo ratings yet
- Electricity (Theory&Numericals)Document30 pagesElectricity (Theory&Numericals)Anthony LoboNo ratings yet
- Chapter 2 - Direct Current MetersDocument42 pagesChapter 2 - Direct Current MetersANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Chapter 3Document124 pagesChapter 3Endalk SimegnNo ratings yet
- Chapter ThreeDocument50 pagesChapter Threematusala abhaNo ratings yet
- Laboratory Activity No. 7Document5 pagesLaboratory Activity No. 7Ian EbonesNo ratings yet
- Transducers and Data Acquisition SystemsDocument95 pagesTransducers and Data Acquisition SystemsBrijesh B NaikNo ratings yet
- Loading Effects and Two-Port Networks Week 5 - 6Document31 pagesLoading Effects and Two-Port Networks Week 5 - 6منتصر الجعبريNo ratings yet
- 6545464Document7 pages6545464Justine L GarciaNo ratings yet
- c.12 Physics Current ElectricityDocument18 pagesc.12 Physics Current ElectricityRitikaNo ratings yet
- EE 3204 Lec 01Document31 pagesEE 3204 Lec 01earl pannilaNo ratings yet
- ResistanceDocument19 pagesResistancexjaykaeNo ratings yet
- Displacement SensorDocument41 pagesDisplacement SensorAdesh JagtapNo ratings yet
- EECKTM1L Exp 2 Series and Parallel ConnectionDocument6 pagesEECKTM1L Exp 2 Series and Parallel ConnectionDaniel S. MacaraegNo ratings yet
- Thevininas THMDocument8 pagesThevininas THMaamer_shahbaazNo ratings yet
- Measurement of High Voltages and CurrentsDocument22 pagesMeasurement of High Voltages and CurrentsahdabmkNo ratings yet
- Transeducer Lab Part 1Document41 pagesTranseducer Lab Part 1Yasser IsteitiehNo ratings yet
- Chapter 6 Measurement of Non-Electrical Quantities Term 2220Document72 pagesChapter 6 Measurement of Non-Electrical Quantities Term 2220j2yshjzzsxNo ratings yet
- Transmission Line Lecture PDFDocument80 pagesTransmission Line Lecture PDFCharlespatrick OriasNo ratings yet
- Resistive TransducerDocument75 pagesResistive TransducerDhineshSKNo ratings yet
- Lec. 12Document25 pagesLec. 12vbshdh267No ratings yet
- Analog Measuring InstrumentsDocument43 pagesAnalog Measuring Instrumentsmuvvala charithaNo ratings yet
- EE413 Lecture 1Document23 pagesEE413 Lecture 1Veena MundaNo ratings yet
- EE413 Lecture 2Document21 pagesEE413 Lecture 2Veena MundaNo ratings yet
- EE413 Lecture 10Document18 pagesEE413 Lecture 10Veena MundaNo ratings yet
- EE413 Lecture 6Document22 pagesEE413 Lecture 6Veena MundaNo ratings yet
- EE413 - Lecture 8Document14 pagesEE413 - Lecture 8Veena MundaNo ratings yet
- Class IDocument9 pagesClass IVeena MundaNo ratings yet
- EE413 Module IDocument162 pagesEE413 Module IVeena MundaNo ratings yet
- Tasks Week 11-12 Filma Manurung - 1705061022 - Tj-6aDocument18 pagesTasks Week 11-12 Filma Manurung - 1705061022 - Tj-6aJuliyanti HasibuanNo ratings yet
- Manual Ignijet 2007 Ducati enDocument12 pagesManual Ignijet 2007 Ducati enMixalis KotsikasNo ratings yet
- DS150 Manitex Service Manual EnglishDocument28 pagesDS150 Manitex Service Manual EnglishRuben De La RosaNo ratings yet
- User's Manual: D.C. Motor StudyDocument25 pagesUser's Manual: D.C. Motor Studymanoj_varma_1No ratings yet
- DPI 530 User ManualDocument45 pagesDPI 530 User ManualtrpsivaNo ratings yet
- EDN Design Ideas 2000Document215 pagesEDN Design Ideas 2000chag1956100% (3)
- Resistor: Group 1: Reactive PowerDocument73 pagesResistor: Group 1: Reactive PowerAlain CopperNo ratings yet
- En Relee de Timp SchrackDocument36 pagesEn Relee de Timp SchrackAnthony Adams50% (2)
- Basler KR4FFMX - AvrDocument4 pagesBasler KR4FFMX - AvrAlejandra Toro Velasquez100% (2)
- LVDT Bestech PDFDocument2 pagesLVDT Bestech PDFRajitha ShehanNo ratings yet
- Ee 380d Manual (New)Document20 pagesEe 380d Manual (New)ashley_hance6036No ratings yet
- Experiments H-TecDocument40 pagesExperiments H-TecAmélia MoreiraNo ratings yet
- Rotary Damper Actuator: 2 Point and 3 Point Control With PotentiometerDocument4 pagesRotary Damper Actuator: 2 Point and 3 Point Control With PotentiometerLuis SilveiraNo ratings yet
- Setting and ThickeningDocument14 pagesSetting and ThickeningAli NasirNo ratings yet
- Max5160 Max5161Document9 pagesMax5160 Max5161Moditha Lakshan100% (1)
- 00027646-C JB Wiring DiagramDocument37 pages00027646-C JB Wiring DiagramKarikalan JayNo ratings yet
- MIKRO2 - Teori MK MikrokontrollerDocument126 pagesMIKRO2 - Teori MK MikrokontrollerRelay PK 12100% (1)
- Q 1.how Does Vibration Galvanometer Differ From D'Arsonval GalvanometerDocument9 pagesQ 1.how Does Vibration Galvanometer Differ From D'Arsonval GalvanometerNavin BhaskarNo ratings yet
- Syp 029048Document20 pagesSyp 029048testNo ratings yet
- Functii Basic ArduinoDocument5 pagesFunctii Basic ArduinoVioleta AnghelNo ratings yet
- Eriez Vibratory Controls VB 202 PDFDocument6 pagesEriez Vibratory Controls VB 202 PDFagus rasidNo ratings yet
- 4024 EPG (Electrically Powered Governor) : Product Manual 82042 (Revision B, 3/2008)Document34 pages4024 EPG (Electrically Powered Governor) : Product Manual 82042 (Revision B, 3/2008)reinelvillarNo ratings yet
- Term Paper On Construction of 12 Volts Power SupplyDocument15 pagesTerm Paper On Construction of 12 Volts Power SupplyVictor ImehNo ratings yet
- Aumatic Control Unit: Aumund Fördertechnik GMBHDocument7 pagesAumatic Control Unit: Aumund Fördertechnik GMBHBruno SantosNo ratings yet