You might also like
- New Directions in Dynamical Systems, Automatic Control and Singular PerturbationsFrom EverandNew Directions in Dynamical Systems, Automatic Control and Singular PerturbationsNo ratings yet
- A New Four-Scroll Chaotic System With A Self-Excited Attractor and Circuit ImplementationDocument5 pagesA New Four-Scroll Chaotic System With A Self-Excited Attractor and Circuit ImplementationMada Sanjaya WsNo ratings yet
- A New 4-D Chaotic System With Hidden Attractor and Its Circuit ImplementationDocument6 pagesA New 4-D Chaotic System With Hidden Attractor and Its Circuit ImplementationMada Sanjaya WsNo ratings yet
- HAttractorsDocument13 pagesHAttractorsDaniel Reyes SierraNo ratings yet
- Chaos, Solitons and Fractals: Qiang Lai, Tsafack Nestor, Jacques Kengne, Xiao-Wen ZhaoDocument11 pagesChaos, Solitons and Fractals: Qiang Lai, Tsafack Nestor, Jacques Kengne, Xiao-Wen ZhaoTSAFACK NESTORNo ratings yet
- Synchronization of Chaotic Systems With Uncertain Parameters by Adaptive ControlDocument4 pagesSynchronization of Chaotic Systems With Uncertain Parameters by Adaptive Controllaz_chikhi1574No ratings yet
- Nonlinear Observer Design For L-V SystemDocument8 pagesNonlinear Observer Design For L-V SystemhiijjournalNo ratings yet
- A New Chaotic Attractor From General Lorenz System Family and Its Electronic Experimental ImplementationDocument14 pagesA New Chaotic Attractor From General Lorenz System Family and Its Electronic Experimental Implementationihsan333No ratings yet
- Linear Dynamical System KalmanDocument41 pagesLinear Dynamical System KalmanNitin BhitreNo ratings yet
- Chaotic Dynamics of The Fractional Lorenz SystemDocument4 pagesChaotic Dynamics of The Fractional Lorenz SystemCristian Camilo CerónNo ratings yet
- 10 1088@1757-899x@332@1@012048 PDFDocument11 pages10 1088@1757-899x@332@1@012048 PDFMada Sanjaya WsNo ratings yet
- Research ArticleDocument11 pagesResearch ArticleAnonymous FampaLXjNo ratings yet
- Multiple Attractor in Newton-Leipnik System, Peak-To-peak Dynamics and Chaos ControlDocument13 pagesMultiple Attractor in Newton-Leipnik System, Peak-To-peak Dynamics and Chaos Control김상인No ratings yet
- 1 s2.0 S0030402612002823 MainDocument7 pages1 s2.0 S0030402612002823 MainUli Urio-LegoNo ratings yet
- Cryptography MIDocument7 pagesCryptography MIsrisairampolyNo ratings yet
- Applications of Dynamical SystemsDocument32 pagesApplications of Dynamical SystemsAl VlearNo ratings yet
- The Influence of The Lorenz System Fractionality oDocument5 pagesThe Influence of The Lorenz System Fractionality oJulexy AntonellaNo ratings yet
- Computers and Mathematics With Applications: Yan Li, Yangquan Chen, Igor PodlubnyDocument12 pagesComputers and Mathematics With Applications: Yan Li, Yangquan Chen, Igor PodlubnykarpagasenthilpandyNo ratings yet
- 0807 2107 PDFDocument61 pages0807 2107 PDFAlexandra BarrosoNo ratings yet
- Accepted Manuscript Not CopyeditedDocument34 pagesAccepted Manuscript Not CopyeditedNabil HanecheNo ratings yet
- GMTDTR 20180208Document7 pagesGMTDTR 20180208ghassen marouaniNo ratings yet
- Mathematics 08 00992Document20 pagesMathematics 08 00992JaimeSobrinhoNo ratings yet
- Genetic Algorithms and Lindenmayer SystemsDocument10 pagesGenetic Algorithms and Lindenmayer SystemsEmilian AeiNo ratings yet
- BoualiS 3dDocument8 pagesBoualiS 3dGuilherme Francisco ComassettoNo ratings yet
- Synchronization, Anti-Synchronization and Hybrid-Synchronization of A Double Pendulum Under The Effect of External ForcesDocument11 pagesSynchronization, Anti-Synchronization and Hybrid-Synchronization of A Double Pendulum Under The Effect of External ForcesInternational Journal of computational Engineering research (IJCER)No ratings yet
- Adaptive Integral Observer-Based Synchronization ForDocument9 pagesAdaptive Integral Observer-Based Synchronization ForWalid AbidNo ratings yet
- On Observer Design For Nonlinear Takagi-Sugeno Systems With Unmeasurable Premise VariableDocument6 pagesOn Observer Design For Nonlinear Takagi-Sugeno Systems With Unmeasurable Premise VariableaimalNo ratings yet
- Research ArticleDocument20 pagesResearch ArticlerasminojNo ratings yet
- Dynamics of Two Classes of Lorenz-Type Chaotic Systems: Fuchen Zhang, Chunlai Mu, Guangyun Zhang, and Da LinDocument7 pagesDynamics of Two Classes of Lorenz-Type Chaotic Systems: Fuchen Zhang, Chunlai Mu, Guangyun Zhang, and Da Linsaeed akbarNo ratings yet
- Systems: Visual Analysis of Nonlinear Dynamical Systems: Chaos, Fractals, Self-Similarity and The Limits of PredictionDocument18 pagesSystems: Visual Analysis of Nonlinear Dynamical Systems: Chaos, Fractals, Self-Similarity and The Limits of PredictionbwcastilloNo ratings yet
- 2020 Mega1 PDFDocument9 pages2020 Mega1 PDFzeric njtackeNo ratings yet
- Notions of Chaotic Cryptography: Sketch of A Chaos Based CryptosystemDocument28 pagesNotions of Chaotic Cryptography: Sketch of A Chaos Based CryptosystemAswin AswinNo ratings yet
- Received 12 December 2005Document7 pagesReceived 12 December 2005Andres GuevaraNo ratings yet
- 1.1 Preliminary Remarks: Objective and Motiva-Tion: Nic95 NN07 May74 Mur01 Smi78 SB06 NP77Document26 pages1.1 Preliminary Remarks: Objective and Motiva-Tion: Nic95 NN07 May74 Mur01 Smi78 SB06 NP77anil ariNo ratings yet
- M&S Lab-15 (Batch-21) 2Document5 pagesM&S Lab-15 (Batch-21) 2pareesabuxshoroNo ratings yet
- Identification of Multi-Degree-Of-Freedom Non-Linear Systems Under Random Excitations by The Reverse Path'' Spectral MethodDocument36 pagesIdentification of Multi-Degree-Of-Freedom Non-Linear Systems Under Random Excitations by The Reverse Path'' Spectral Methodshedat_utopian872941No ratings yet
- Adaptive Identification and Control of Dynamical Systems Using N PDFDocument2 pagesAdaptive Identification and Control of Dynamical Systems Using N PDFKeerthana g.krishnanNo ratings yet
- Helicopter Dynamics-10Document14 pagesHelicopter Dynamics-10KaradiasNo ratings yet
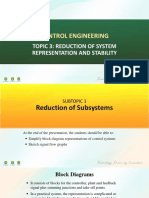
- Reduction of System Representation and StabilityDocument24 pagesReduction of System Representation and Stabilitynaughty dela cruzNo ratings yet
- Contraejemplo Aizerman KalmanDocument7 pagesContraejemplo Aizerman KalmanPablo MonzónNo ratings yet
- Chapter 2Document27 pagesChapter 2hailegebreselassie24No ratings yet
- Robust Interval Observers For Uncertain Chaotic SystemsDocument6 pagesRobust Interval Observers For Uncertain Chaotic SystemsWissal KHEMIRINo ratings yet
- Global Stochastic Synchronization of Chaotic OscillatorsDocument6 pagesGlobal Stochastic Synchronization of Chaotic OscillatorsBit32No ratings yet
- Vibration AnalysisDocument18 pagesVibration AnalysisSangolla NarahariNo ratings yet
- 1.1 What Is Chaos?: 1.1.1 The Definition For ChaosDocument25 pages1.1 What Is Chaos?: 1.1.1 The Definition For ChaosSanjeewa ThambugalaNo ratings yet
- 10 1002@047134608X W1022 Pub2Document13 pages10 1002@047134608X W1022 Pub2Legis FloyenNo ratings yet
- Inverse Synchronization of Coupled Fractional-Order Systems Through Open-Plus-Closed-Loop ControlDocument12 pagesInverse Synchronization of Coupled Fractional-Order Systems Through Open-Plus-Closed-Loop Controllanoke9980No ratings yet
- 2014-A Family of Hyperchaotic Multi-Scroll Attractors in R NDocument12 pages2014-A Family of Hyperchaotic Multi-Scroll Attractors in R NEduardo AraujoNo ratings yet
- MATH 301 Linear Algebra: NU Spring 2018Document26 pagesMATH 301 Linear Algebra: NU Spring 2018Ibrahim AdelNo ratings yet
- Mechanical Vibration of Multiple Degrees of Freedom SystemsDocument5 pagesMechanical Vibration of Multiple Degrees of Freedom SystemsChristopher YsitNo ratings yet
- Stability-Boundary Approximations For Relay-Control Systems Via A Steepest-Ascent Construction of Lyapunov FunctionsDocument10 pagesStability-Boundary Approximations For Relay-Control Systems Via A Steepest-Ascent Construction of Lyapunov FunctionsWade ZhangNo ratings yet
- 01 Introduction 2nd Order Systems OLDDocument28 pages01 Introduction 2nd Order Systems OLDamitshukla.iitkNo ratings yet
- A Method For Fast Synchronization of Chaotic Systems and Its Application To Chaos Based Secure CommunicationDocument5 pagesA Method For Fast Synchronization of Chaotic Systems and Its Application To Chaos Based Secure CommunicationThọ Nguyễn VănNo ratings yet
- Singular Control SystemsDocument16 pagesSingular Control SystemsDavid StuartNo ratings yet
- Module1 Masoller Part1Document87 pagesModule1 Masoller Part1Daniel GuevaraNo ratings yet
- 2002 Papachristodoulou PrajnaDocument6 pages2002 Papachristodoulou PrajnaJéssica Cunha PinheiroNo ratings yet
- Physics Letters A: D.W. Lee, W.J. Yoo, S.C. WonDocument7 pagesPhysics Letters A: D.W. Lee, W.J. Yoo, S.C. WonRafael Gonçalves de LimaNo ratings yet
- Filtro LorenzDocument15 pagesFiltro LorenzAgustin AboytesNo ratings yet
- A A A BDocument18 pagesA A A BM.Z. FengNo ratings yet
- NgoMouelas2019 Article ExtremelyRichDynamicalBehaviorDocument19 pagesNgoMouelas2019 Article ExtremelyRichDynamicalBehaviorAdele Armele Ngo Mouelas Epse LothinNo ratings yet
- 10.1515 - Zna 1976 1231Document7 pages10.1515 - Zna 1976 1231Sudipta MaityNo ratings yet
- Fad Presentation 1XDocument8 pagesFad Presentation 1XSudipta MaityNo ratings yet
- QHDocument1 pageQHSudipta MaityNo ratings yet
- Fad Presentation 1XDocument8 pagesFad Presentation 1XSudipta MaityNo ratings yet
- Failure Analysis of Stress Corrosion Cracking in Aircraft BoltsDocument9 pagesFailure Analysis of Stress Corrosion Cracking in Aircraft BoltsSudipta MaityNo ratings yet
- Mathematics 08 02063Document14 pagesMathematics 08 02063Sudipta MaityNo ratings yet
- Design Optimization of Deep Groove Ball Bearings Using Crowding Distance Particle Swarm OptimizationDocument8 pagesDesign Optimization of Deep Groove Ball Bearings Using Crowding Distance Particle Swarm OptimizationSudipta MaityNo ratings yet
- Design Optimization of Controller Parameters UsedDocument9 pagesDesign Optimization of Controller Parameters UsedAmany HamdyNo ratings yet
- E-Mail Id of ProfessorsDocument1 pageE-Mail Id of ProfessorsSudipta MaityNo ratings yet
- Verbal-Root Word Additional MaterialDocument1 pageVerbal-Root Word Additional MaterialSudipta MaityNo ratings yet
- Design Optimization of Controller Parameters UsedDocument9 pagesDesign Optimization of Controller Parameters UsedAmany HamdyNo ratings yet
- Soft Skills Task 15-11-21Document1 pageSoft Skills Task 15-11-21Sudipta MaityNo ratings yet
- Verbal - Synonyms & AntonymsDocument1 pageVerbal - Synonyms & AntonymsSudipta MaityNo ratings yet
- L6 Optimality Criterian - TutorialDocument3 pagesL6 Optimality Criterian - TutorialSudipta MaityNo ratings yet
- Program Start Date (10 AM) End Date (5 PM) : Circular - Course Registration-Even Semester - Ay 2021-2022Document3 pagesProgram Start Date (10 AM) End Date (5 PM) : Circular - Course Registration-Even Semester - Ay 2021-2022Sudipta MaityNo ratings yet
- Optimization Assignment3Document5 pagesOptimization Assignment3Sudipta MaityNo ratings yet
- L7 Optimality Criterian - Constrained Problem - KT ConditionsDocument8 pagesL7 Optimality Criterian - Constrained Problem - KT ConditionsSudipta MaityNo ratings yet
- L8 Single Variable Optimization AlgorithmsDocument9 pagesL8 Single Variable Optimization AlgorithmsSudipta MaityNo ratings yet
- M.Tech - Policies and ProceduresDocument11 pagesM.Tech - Policies and ProceduresSudipta MaityNo ratings yet
- 21ED602 Optimization Techniques in Engineering: Class Notes (Internal Circulation)Document7 pages21ED602 Optimization Techniques in Engineering: Class Notes (Internal Circulation)Sudipta MaityNo ratings yet
- Department of Mechanical Engineering Mtech-Course Plan - 2021-22 Odd A. Course DetailsDocument12 pagesDepartment of Mechanical Engineering Mtech-Course Plan - 2021-22 Odd A. Course DetailsSudipta MaityNo ratings yet
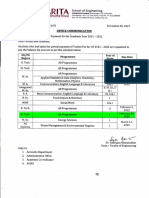
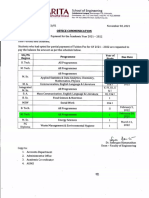
- Office Communication Partial Tuition Fee PaymentDocument1 pageOffice Communication Partial Tuition Fee PaymentSudipta MaityNo ratings yet
- Office Communication Partial Tuition Fee PaymentDocument1 pageOffice Communication Partial Tuition Fee PaymentSudipta MaityNo ratings yet
- Amrita M.Tech Program Fee Structure - 2021: Tuition Fee Details (In Rupees)Document1 pageAmrita M.Tech Program Fee Structure - 2021: Tuition Fee Details (In Rupees)Sudipta MaityNo ratings yet
- Solutions Manual Continuum Mechanics Lai 4th EdittionDocument246 pagesSolutions Manual Continuum Mechanics Lai 4th Edittiondiego_dave89% (18)
- 18ED651 Failure Analysis and Design: (Answer Should Not Be More Than 3 Lines)Document2 pages18ED651 Failure Analysis and Design: (Answer Should Not Be More Than 3 Lines)Sudipta MaityNo ratings yet
- MA2-01-12-2020 KeyDocument8 pagesMA2-01-12-2020 KeySudipta MaityNo ratings yet
- QP - MA1-20-10-2020-KeyDocument4 pagesQP - MA1-20-10-2020-KeySudipta MaityNo ratings yet
- 18ED651 Failure Analysis and Design: (Answer Should Not Be More Than 3 Lines)Document2 pages18ED651 Failure Analysis and Design: (Answer Should Not Be More Than 3 Lines)Sudipta MaityNo ratings yet
- C1 Coordinate Geometry - Circles 1 MSDocument9 pagesC1 Coordinate Geometry - Circles 1 MSwassimNo ratings yet
- Guide For The Fusion Welding of Titanium and Titanium AlloysDocument14 pagesGuide For The Fusion Welding of Titanium and Titanium AlloysA SoniNo ratings yet
- Title: Testing of A Rectifier Circuit: EEE1003 Electrical WorkshopDocument5 pagesTitle: Testing of A Rectifier Circuit: EEE1003 Electrical WorkshopRehma ManalNo ratings yet
- 27.viscoelastic Responses of Polyhedral Oli PDFDocument5 pages27.viscoelastic Responses of Polyhedral Oli PDFVansala GanesanNo ratings yet
- LDE Part 2 of 8 PI Rule 1-3Document7 pagesLDE Part 2 of 8 PI Rule 1-3KalyaniNo ratings yet
- POLARIMETRYDocument17 pagesPOLARIMETRYShaise JacobNo ratings yet
- Installation Operation Maintenance: Light Commercial Split System 5-20 Tons TTH Model 50 HZDocument16 pagesInstallation Operation Maintenance: Light Commercial Split System 5-20 Tons TTH Model 50 HZViệt Đặng XuânNo ratings yet
- gr6 & 7 RoboDocument2 pagesgr6 & 7 RoboPriya Origin internationalNo ratings yet
- Answer Allquestions in This Section.: Confidential Section A (45 Marks)Document4 pagesAnswer Allquestions in This Section.: Confidential Section A (45 Marks)Add Maths TeacherNo ratings yet
- Observation Table - Diffraction GratingDocument5 pagesObservation Table - Diffraction GratingVivek SinghNo ratings yet
- Science Behind The Movie OppenhiemerDocument4 pagesScience Behind The Movie OppenhiemerVinay JacobNo ratings yet
- 2022 Assessment Science 8Document4 pages2022 Assessment Science 8Crecencia BasongitNo ratings yet
- Welcome To Our PresentationDocument40 pagesWelcome To Our PresentationAbdul AzizNo ratings yet
- Design. Given A Factored Design Moment, Select A Suitable Cross Section, Including Dimensions, Concrete StrengthDocument15 pagesDesign. Given A Factored Design Moment, Select A Suitable Cross Section, Including Dimensions, Concrete StrengthGabriel JavelonaNo ratings yet
- Matrix Matrix Equation: FL, e +/.iDocument4 pagesMatrix Matrix Equation: FL, e +/.iJohn SmithNo ratings yet
- Sci409 - WS 8Document4 pagesSci409 - WS 8Hernel Sean CordaNo ratings yet
- Valence Shell Electron Pair Repulsion TheoryDocument20 pagesValence Shell Electron Pair Repulsion TheoryABDUL WAHABNo ratings yet
- Amistco - KO Drum Demister Options (Mist Eliminator Spacing What To Do For Liquid Carryover)Document6 pagesAmistco - KO Drum Demister Options (Mist Eliminator Spacing What To Do For Liquid Carryover)Mubarik AliNo ratings yet
- Alternator, (20000929-20031130) DatasheetDocument2 pagesAlternator, (20000929-20031130) DatasheetSales support TechnicalNo ratings yet
- Thesis On Atomic Layer DepositionDocument4 pagesThesis On Atomic Layer Depositionbellabellmanchester100% (2)
- Unimac UW125TVDocument82 pagesUnimac UW125TVCarlos TrybiecNo ratings yet
- Type FP Sizes 8 To 20 - EngDocument2 pagesType FP Sizes 8 To 20 - EngShyam J VyasNo ratings yet
- Fiber Optic Color ChartDocument1 pageFiber Optic Color Charttohamy2009100% (2)
- Research Papers On Piezoelectric MaterialsDocument6 pagesResearch Papers On Piezoelectric Materialsafmcpdbnr100% (1)
- Bessel Functions For Engineers. by N. W. Mclachlan. Oxford, Clarendon PressDocument2 pagesBessel Functions For Engineers. by N. W. Mclachlan. Oxford, Clarendon PressDIEGO MAX SILVA LOPESNo ratings yet
- Data Ncrp151Document17 pagesData Ncrp151Ibtissam ZazgadNo ratings yet
- 16sccmm14-Apr 2020Document5 pages16sccmm14-Apr 2020esanjai510No ratings yet
- Lidocaine Base and Hydrochloride: Groningsson, Lindgren, Lundberg, SandbergDocument37 pagesLidocaine Base and Hydrochloride: Groningsson, Lindgren, Lundberg, SandbergtikaNo ratings yet
- Anphar 253-090616Document3 pagesAnphar 253-090616vinodNo ratings yet
- DM-860A Digital Multimeter ManualDocument76 pagesDM-860A Digital Multimeter ManualNeuro HernándezNo ratings yet
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)From EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)No ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryFrom EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNo ratings yet
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (80)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Who Tells the Truth?: Collection of Logical Puzzles to Make You ThinkFrom EverandWho Tells the Truth?: Collection of Logical Puzzles to Make You ThinkRating: 5 out of 5 stars5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathFrom EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathRating: 5 out of 5 stars5/5 (1)
- Transform Your 6-12 Math Class: Digital Age Tools to Spark LearningFrom EverandTransform Your 6-12 Math Class: Digital Age Tools to Spark LearningNo ratings yet
- Magic Multiplication: Discover the Ultimate Formula for Fast MultiplicationFrom EverandMagic Multiplication: Discover the Ultimate Formula for Fast MultiplicationNo ratings yet