You might also like
- The First Integral Method To Nonlinear Partial Differential EquationsDocument16 pagesThe First Integral Method To Nonlinear Partial Differential EquationsRobertson BasumataryNo ratings yet
- RBF-DQ Method For Solving Non-Linear Differential Equations of Lane-Emden TypeDocument15 pagesRBF-DQ Method For Solving Non-Linear Differential Equations of Lane-Emden Typelekan4No ratings yet
- Fifth China WenDocument7 pagesFifth China WenkaosanhumamNo ratings yet
- اpaper -matricesDocument5 pagesاpaper -matricesEman SadiNo ratings yet
- Analytical Investigation and Graphical Simulations For The So - 2023 - Results IDocument8 pagesAnalytical Investigation and Graphical Simulations For The So - 2023 - Results Ironaldquezada038No ratings yet
- 1 s2.0 S0375960122005850 MainDocument6 pages1 s2.0 S0375960122005850 MainSajjad AliNo ratings yet
- Results in Physics: Sanjaya Kr. Mohanty, Oleg V. Kravchenko, Apul N. DevDocument14 pagesResults in Physics: Sanjaya Kr. Mohanty, Oleg V. Kravchenko, Apul N. DevNagehanNo ratings yet
- Analytical Study of Anisotropic Compact Star ModelsDocument12 pagesAnalytical Study of Anisotropic Compact Star Modelsmaria.d.quizhpe.rNo ratings yet
- Symmetry 15 01144 v2Document20 pagesSymmetry 15 01144 v2Prince BhartiNo ratings yet
- Study On Nonlinear Partial Differential Equation by Implementing MSE MethodDocument15 pagesStudy On Nonlinear Partial Differential Equation by Implementing MSE Methodzenabaabanega640No ratings yet
- Physics-Informed Neural Networks For High-Speed Flows: SciencedirectDocument26 pagesPhysics-Informed Neural Networks For High-Speed Flows: Sciencedirectchethan mahadevNo ratings yet
- Heliyon: H.M. Shahadat Ali, M.A. Habib, M.Mamun Miah, M. Ali AkbarDocument12 pagesHeliyon: H.M. Shahadat Ali, M.A. Habib, M.Mamun Miah, M. Ali AkbarAndry WirawanNo ratings yet
- New Student PaperDocument8 pagesNew Student PaperSyeda Tehmina EjazNo ratings yet
- 276-Article Text-826-1-10-20230322Document10 pages276-Article Text-826-1-10-20230322shiksmenNo ratings yet
- Heliyon: Solitary and Periodic Wave Solutions To The Family of New 3D Fractional WBBM Equations in Mathematical PhysicsDocument11 pagesHeliyon: Solitary and Periodic Wave Solutions To The Family of New 3D Fractional WBBM Equations in Mathematical PhysicsMd. AsaduzzamanNo ratings yet
- Thermal PhysicsDocument5 pagesThermal PhysicsLeonardoNo ratings yet
- Content ServerDocument7 pagesContent ServerHadjer HadjerNo ratings yet
- The Laplace Method For Energy Eigenvalue Problems in Quantum MechanicsDocument35 pagesThe Laplace Method For Energy Eigenvalue Problems in Quantum MechanicsJoshua WrightNo ratings yet
- The G /g-Expansion Method For Solutions of Evolution Equations From Isothermal Magnetostatic AtmospheresDocument6 pagesThe G /g-Expansion Method For Solutions of Evolution Equations From Isothermal Magnetostatic AtmospheresAndreea NovacescuNo ratings yet
- Bifurcations Chaotic Dynamics Sensitivity Analysis and Some N - 2023 - ResultsDocument13 pagesBifurcations Chaotic Dynamics Sensitivity Analysis and Some N - 2023 - Resultsronaldquezada038No ratings yet
- Exploring The New Soliton Solutions To The Nonlinear M Fractio - 2023 - ResultsDocument17 pagesExploring The New Soliton Solutions To The Nonlinear M Fractio - 2023 - Resultsronaldquezada038No ratings yet
- A Finite Element Solution of The Beam Equation Via MATLAB: Applied Science and Engineering Progress October 2012Document10 pagesA Finite Element Solution of The Beam Equation Via MATLAB: Applied Science and Engineering Progress October 2012Kartika AhujaNo ratings yet
- Python Program To Generate Spherical HarmonicDocument11 pagesPython Program To Generate Spherical HarmonicWARSE JournalsNo ratings yet
- Hyperbolic Space Time SingularitiesDocument12 pagesHyperbolic Space Time Singularitiesannunaki-1974No ratings yet
- HXP 002 V 1Document15 pagesHXP 002 V 1Ganesh DiwanNo ratings yet
- Bs SynopsisDocument7 pagesBs SynopsisFida HussainNo ratings yet
- L2 - First Order ODEsDocument28 pagesL2 - First Order ODEskangdh0923No ratings yet
- Haar Wavelet Quasi-Linearization Approach For Solving Lane Emden EquationsDocument14 pagesHaar Wavelet Quasi-Linearization Approach For Solving Lane Emden EquationsTJPRC PublicationsNo ratings yet
- A Comparison Between The Reduced Differential Transform Method and The Adomian Decomposition Method For The Newell-Whitehead-Segel EquationDocument7 pagesA Comparison Between The Reduced Differential Transform Method and The Adomian Decomposition Method For The Newell-Whitehead-Segel EquationArun PatelNo ratings yet
- PDESoranUniversity PDFDocument24 pagesPDESoranUniversity PDFAram Nasih MuhammadNo ratings yet
- Engineering Analysis Ii: Partial Differential Equations (Pdes) and Applications To EngineeringDocument24 pagesEngineering Analysis Ii: Partial Differential Equations (Pdes) and Applications To EngineeringAram Nasih MuhammadNo ratings yet
- 100-W-Shaped Surfaces To The Nematic Liquid CrystalsDocument13 pages100-W-Shaped Surfaces To The Nematic Liquid CrystalsShewlyAktar MistyNo ratings yet
- BS Synopsis-1Document10 pagesBS Synopsis-1Fida HussainNo ratings yet
- Journal of King Saud University - Science: Aman Ullah, Zia Ullah, Thabet Abdeljawad, Zakia Hammouch, Kamal ShahDocument8 pagesJournal of King Saud University - Science: Aman Ullah, Zia Ullah, Thabet Abdeljawad, Zakia Hammouch, Kamal ShahIoana BiticaNo ratings yet
- The Traveling Wave Solution and Dynamics Analysis of The Parabol - 2023 - ResultDocument6 pagesThe Traveling Wave Solution and Dynamics Analysis of The Parabol - 2023 - Resultronaldquezada038No ratings yet
- Vol5 - Iss4 - 280 - 287 - Solving - Nonlinear - System - of - Mixed - V PDFDocument8 pagesVol5 - Iss4 - 280 - 287 - Solving - Nonlinear - System - of - Mixed - V PDFAdorateur Koutchakbe FelixNo ratings yet
- Farlina 2018 IOP Conf. Ser. Mater. Sci. Eng. 434 012010Document8 pagesFarlina 2018 IOP Conf. Ser. Mater. Sci. Eng. 434 012010Hidayat DgManarangNo ratings yet
- PuiseusEinsteina945106 0242022Document9 pagesPuiseusEinsteina945106 0242022Roberto SilvaNo ratings yet
- 1 Time FractionalDocument28 pages1 Time FractionalBoutiara AbdellatifNo ratings yet
- Partial Differential Equations in Applied MathematicsDocument6 pagesPartial Differential Equations in Applied MathematicsMd. AsaduzzamanNo ratings yet
- 11 10 27 76dc6Document13 pages11 10 27 76dc6Charlie HultgreenNo ratings yet
- Comparison of Fuzzy Adomian Decomposition Method W PDFDocument42 pagesComparison of Fuzzy Adomian Decomposition Method W PDFmhamadNo ratings yet
- Slevinsky JCP 332 2017 290Document26 pagesSlevinsky JCP 332 2017 290Yopos Quienmás JejeNo ratings yet
- Applied Mathematics and Computation: S. Iqbal, A. JavedDocument9 pagesApplied Mathematics and Computation: S. Iqbal, A. JavedBack UpNo ratings yet
- Manuscript Details: Submission Files Included in This PDFDocument22 pagesManuscript Details: Submission Files Included in This PDFVarun JoshiNo ratings yet
- Theoretical Developments in The Study of Partial Differential EquationsDocument24 pagesTheoretical Developments in The Study of Partial Differential EquationsHidden ModeNo ratings yet
- SI0415 AAM MT 110418 Posted 032119 PDFDocument20 pagesSI0415 AAM MT 110418 Posted 032119 PDFVelmurugan mNo ratings yet
- Effective Medium Theory For Dispersions of Dielectric EllipsoidsDocument18 pagesEffective Medium Theory For Dispersions of Dielectric Ellipsoidsprakush01975225403No ratings yet
- Regularized Hankel JAEDocument16 pagesRegularized Hankel JAEVasili TabatadzeNo ratings yet
- Computers and Mathematics With Applications: B. Khatri Ghimire, H.Y. Tian, A.R. LamichhaneDocument13 pagesComputers and Mathematics With Applications: B. Khatri Ghimire, H.Y. Tian, A.R. LamichhaneJerson RodriguezNo ratings yet
- 1 s2.0 S1877750324000279 MainDocument10 pages1 s2.0 S1877750324000279 Mainmosab.backkupNo ratings yet
- Lecture5 Klein Gordon DiracDocument11 pagesLecture5 Klein Gordon DiracShahzad AliNo ratings yet
- Homotopy Perturbation Method For Solving Fokker-Planck EquationDocument14 pagesHomotopy Perturbation Method For Solving Fokker-Planck Equationmasyuki1979No ratings yet
- Journal 46-1 2Document8 pagesJournal 46-1 2DilipSinghNo ratings yet
- Crank NicolsonandModifiedCrank Nicolsonmethods1Document7 pagesCrank NicolsonandModifiedCrank Nicolsonmethods1Zina SawafNo ratings yet
- Physics-Informed Neural Networks For High-Speed Ows: Computer Methods in Applied Mechanics and Engineering March 2020Document27 pagesPhysics-Informed Neural Networks For High-Speed Ows: Computer Methods in Applied Mechanics and Engineering March 2020Vasu BansalNo ratings yet
- 30 35, Tesma501, IJEAST PDFDocument6 pages30 35, Tesma501, IJEAST PDFsanketNo ratings yet
- Research Article: Linearization of Fifth-Order Ordinary Differential Equations by Generalized Sundman TransformationsDocument18 pagesResearch Article: Linearization of Fifth-Order Ordinary Differential Equations by Generalized Sundman TransformationsMomina JavedNo ratings yet
- Effect of Thermal Gradient On Vibration of Non Homogeneou - 2013 - Ain Shams EngDocument8 pagesEffect of Thermal Gradient On Vibration of Non Homogeneou - 2013 - Ain Shams EngOsama MohammdNo ratings yet
- Editorial Board - 2013 - Ain Shams Engineering JournalDocument1 pageEditorial Board - 2013 - Ain Shams Engineering JournalOsama MohammdNo ratings yet
- Effect of Sewage Wastes On The Physico Mechanical Prop - 2013 - Ain Shams EngineDocument5 pagesEffect of Sewage Wastes On The Physico Mechanical Prop - 2013 - Ain Shams EngineOsama MohammdNo ratings yet
- Temperature Effects On The Vibration Characteristics - 2013 - Ain Shams EngineeDocument10 pagesTemperature Effects On The Vibration Characteristics - 2013 - Ain Shams EngineeOsama MohammdNo ratings yet
- Solving Fractional Two Point Boundary Value Problems - 2013 - Ain Shams EngineeDocument9 pagesSolving Fractional Two Point Boundary Value Problems - 2013 - Ain Shams EngineeOsama MohammdNo ratings yet
- Slip Effects On MHD Boundary Layer Flow Over An Exponenti - 2013 - Ain Shams EngDocument7 pagesSlip Effects On MHD Boundary Layer Flow Over An Exponenti - 2013 - Ain Shams EngOsama MohammdNo ratings yet
- Scheduling and Sequencing in Four Machines Robotic Cell - 2013 - Ain Shams EngDocument10 pagesScheduling and Sequencing in Four Machines Robotic Cell - 2013 - Ain Shams EngOsama MohammdNo ratings yet
- NCHRP Syn 175Document100 pagesNCHRP Syn 175Osama MohammdNo ratings yet
- 1 9 166 ABS0557 FV ApeagyeiDocument13 pages1 9 166 ABS0557 FV ApeagyeiOsama MohammdNo ratings yet
- An Efficient Analytical Approach For MHD Viscous Flow Ove 2013 Ain Shams EngDocument7 pagesAn Efficient Analytical Approach For MHD Viscous Flow Ove 2013 Ain Shams EngOsama MohammdNo ratings yet
- Impacts of Moisture On Asphalt PropertiesDocument140 pagesImpacts of Moisture On Asphalt PropertiesOsama MohammdNo ratings yet
- Masad Et Al AAPT 2007 VFinal-with-cover-page-V2Document34 pagesMasad Et Al AAPT 2007 VFinal-with-cover-page-V2Osama MohammdNo ratings yet
- Influence of Aggregate Absorption and Diffusion Properties On Moisture Damage in Asphalt MixturesDocument20 pagesInfluence of Aggregate Absorption and Diffusion Properties On Moisture Damage in Asphalt MixturesOsama MohammdNo ratings yet
- Inkema Hydraulic Ramp Instruction Manual (Translated To En)Document27 pagesInkema Hydraulic Ramp Instruction Manual (Translated To En)Feras AdvertisementsNo ratings yet
- Notes - Topic 6 Further Mechanics - Edexcel Physics A-LevelDocument7 pagesNotes - Topic 6 Further Mechanics - Edexcel Physics A-LevelBob JonesNo ratings yet
- Powercommand 0300: Operation / Service ManualDocument10 pagesPowercommand 0300: Operation / Service ManualThein Htoon lwinNo ratings yet
- Q4 Summative Test Math 7 SY 2022-2023 (1sheet)Document4 pagesQ4 Summative Test Math 7 SY 2022-2023 (1sheet)ICT CRMNHSNo ratings yet
- Technical Data Sheet "Infinity 3100": 10 15 20 kVA 3Ph - 1PhDocument7 pagesTechnical Data Sheet "Infinity 3100": 10 15 20 kVA 3Ph - 1PhFlorin MNo ratings yet
- Medical PhotonicsDocument2 pagesMedical PhotonicsZikoraNo ratings yet
- Steam: Sunk-Electrode HumidifiersDocument52 pagesSteam: Sunk-Electrode HumidifiersFernando Garnica DelgadoNo ratings yet
- RAPID-P0003-TRSA-CON-ITP-0001-0012 - ITP For Grounding System and Lightning Arrester Installation - R0Document9 pagesRAPID-P0003-TRSA-CON-ITP-0001-0012 - ITP For Grounding System and Lightning Arrester Installation - R0Namta GeorgeNo ratings yet
- (MECH1907) (2021) (F) Final Kbuox7e 32726Document10 pages(MECH1907) (2021) (F) Final Kbuox7e 32726Wish SetsNo ratings yet
- KSB Etabloc Jelleggorbe 50hzDocument172 pagesKSB Etabloc Jelleggorbe 50hzUmar MajeedNo ratings yet
- Surviving Chemistry: A Workbook For High School ChemistryDocument67 pagesSurviving Chemistry: A Workbook For High School ChemistryE3 Scholastic Publishing100% (7)
- A46de A46dfDocument227 pagesA46de A46dfddreidzer100% (1)
- 80010492Document4 pages80010492divxnsNo ratings yet
- 2 AskelandDocument20 pages2 AskelandAlfredo ZuñigaNo ratings yet
- Open Channel FlowDocument161 pagesOpen Channel FlowJuan HeroNo ratings yet
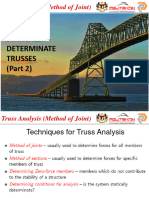
- 5.2 Method of JointsDocument37 pages5.2 Method of Jointsnisa erinaNo ratings yet
- Chimney SolvedDocument2 pagesChimney SolvedJasem Abdurahman50% (4)
- Chemical Reactions and Chemical EquationsDocument34 pagesChemical Reactions and Chemical EquationsIvy Joyce BuanNo ratings yet
- MID 039 - CID 1846 - FMI 09: Pantalla AnteriorDocument6 pagesMID 039 - CID 1846 - FMI 09: Pantalla AnteriorWalterNo ratings yet
- Different Proof Methods of Daltons Partial VolumeDocument6 pagesDifferent Proof Methods of Daltons Partial VolumeMuhammad FurqanNo ratings yet
- Moment of ForceDocument5 pagesMoment of ForceSahrul RamdanNo ratings yet
- Week 4 Lesson 1 DensityDocument29 pagesWeek 4 Lesson 1 DensityMenaga A/P IlangkovanNo ratings yet
- DA 18 BSWS EC + AGS 502A Technical Data (500m)Document1 pageDA 18 BSWS EC + AGS 502A Technical Data (500m)Abraham PerezNo ratings yet
- RC Stair Designrc Stair Design (Bs8110-1:1997) : Project Job RefDocument3 pagesRC Stair Designrc Stair Design (Bs8110-1:1997) : Project Job RefAyodele Oluwaseyi DinaNo ratings yet
- Mri Artifacts FinalDocument44 pagesMri Artifacts FinalSunny SbaNo ratings yet
- Back Pressure and Pressure Relief Valves: Dimensions and Port ConfigurationsDocument3 pagesBack Pressure and Pressure Relief Valves: Dimensions and Port ConfigurationsFábio MathiasNo ratings yet
- Chapter Test - Electric Potential PDFDocument1 pageChapter Test - Electric Potential PDFJennifer MagangoNo ratings yet
- DVP32SM SN Instruction enDocument2 pagesDVP32SM SN Instruction enخطاب الشاميNo ratings yet
- How The Human Eye FocusesDocument8 pagesHow The Human Eye FocusesCucută Alexandru-DanielNo ratings yet
- Belilios Public School Half-Yearly Examination, 2015-2016 MATHEMATICS Compulsory PartDocument33 pagesBelilios Public School Half-Yearly Examination, 2015-2016 MATHEMATICS Compulsory PartOlivia LinNo ratings yet