You might also like
- BOQ BridgeDocument3 pagesBOQ BridgeReffisa JiruNo ratings yet
- Dupa New Construction of Perimeter Fence at Jbdaph 1-09-2023Document21 pagesDupa New Construction of Perimeter Fence at Jbdaph 1-09-2023Kaizen MinnaNo ratings yet
- Msi MS 7529 Rev 1.1 PDFDocument33 pagesMsi MS 7529 Rev 1.1 PDFMisael Alves67% (3)
- Solution Manual For Laboratory Manual in Physical Geology 11th by American Geological InstituteDocument9 pagesSolution Manual For Laboratory Manual in Physical Geology 11th by American Geological InstituteKarenAcevedotkoi100% (40)
- Broadway CafeDocument13 pagesBroadway CafeIoana Taon100% (1)
- Us 8975836Document23 pagesUs 8975836zahra sdeghiniaNo ratings yet
- SEL Patent TIME-DOMAIN DIRECTIONAL LINE PROTECTION OF ELECTRIC POWER DELIVERY SYSTEMS US20170082675A1Document29 pagesSEL Patent TIME-DOMAIN DIRECTIONAL LINE PROTECTION OF ELECTRIC POWER DELIVERY SYSTEMS US20170082675A1Jesús CastellanosNo ratings yet
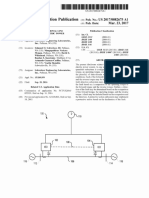
- Patent Application Publication (10) Pub. No.: US 2017/014.4410 A1Document25 pagesPatent Application Publication (10) Pub. No.: US 2017/014.4410 A1Prince Ghosh EponNo ratings yet
- WallDocument1 pageWallRizlan AmirNo ratings yet
- Reference Copy: Federal Communications CommissionDocument2 pagesReference Copy: Federal Communications CommissionA. D.No ratings yet
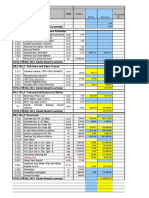
- Item Activity Specs Item Unit Qty Rate (TSHS) Amount (TSHS)Document1 pageItem Activity Specs Item Unit Qty Rate (TSHS) Amount (TSHS)Madevu UnitNo ratings yet
- US7676053Document12 pagesUS7676053Morena SlpNo ratings yet
- Desain Abutment OkDocument41 pagesDesain Abutment OkDoni domara arziNo ratings yet
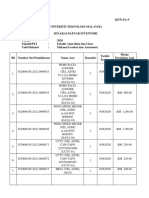
- 2021 Kew - Pa-5 (Hijau) Senarai Daftar InventoriDocument7 pages2021 Kew - Pa-5 (Hijau) Senarai Daftar InventoriNorhidayu BasirNo ratings yet
- Item Activity Specs Item Unit Qty Rate (TSHS) Amount (TSHS)Document4 pagesItem Activity Specs Item Unit Qty Rate (TSHS) Amount (TSHS)Madevu UnitNo ratings yet
- Gasification Cabot PatentDocument19 pagesGasification Cabot PatentChinmoy DholeNo ratings yet
- Lobatse Master Plan BOQ-Option 2Document23 pagesLobatse Master Plan BOQ-Option 2Robins MsowoyaNo ratings yet
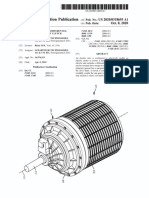
- Patent Application Publication (10) Pub - No .: US 2020/0397391 A1Document184 pagesPatent Application Publication (10) Pub - No .: US 2020/0397391 A1VatsalNo ratings yet
- United States Patent: (10) Patent No.: US 8,350,559 B2Document24 pagesUnited States Patent: (10) Patent No.: US 8,350,559 B2JackYangNo ratings yet
- Natura 2000 - Standard Data FormDocument10 pagesNatura 2000 - Standard Data FormDario Fernandez SalasNo ratings yet
- US7759941Document17 pagesUS7759941pepe argentoNo ratings yet
- Unlted States Patent (10) Patent No.: US 8,314,576 B2Document42 pagesUnlted States Patent (10) Patent No.: US 8,314,576 B2avalosheNo ratings yet
- La0c02115 Si 001Document13 pagesLa0c02115 Si 001peeyush kumarNo ratings yet
- Catchment Parameter (Capa) Method: Peak Flow (Q, M /S) 162.238 342.548 510.888 721.221 1067.487 1340.752 1605.107Document5 pagesCatchment Parameter (Capa) Method: Peak Flow (Q, M /S) 162.238 342.548 510.888 721.221 1067.487 1340.752 1605.107Michael SahleNo ratings yet
- SAC EstimateDocument9 pagesSAC EstimateManjaree WeerasinghaNo ratings yet
- Parts Catalog: 2009/5 (May.) PublishedDocument30 pagesParts Catalog: 2009/5 (May.) Publishedxuan bach vuNo ratings yet
- SC May 2011Document3 pagesSC May 2011Dr. K. Sakthidasan Professor & Head I/C HTBI - ECENo ratings yet
- RC Design GB1: Date: 09/06/2023Document11 pagesRC Design GB1: Date: 09/06/2023engr.geraldkevincatiponNo ratings yet
- Government of Andhra Pradesh: Panchayatraj Engineering DepartmentDocument14 pagesGovernment of Andhra Pradesh: Panchayatraj Engineering DepartmentD.V.Srinivasa RaoNo ratings yet
- S.N Post Description Scheme No Qty Unit Rate Total Budget (Rate Qty) RsDocument7 pagesS.N Post Description Scheme No Qty Unit Rate Total Budget (Rate Qty) Rssonusk777No ratings yet
- US20200318693A1 Electric Axle With Differential Sun Gear Disconnect Clutch - SCHAEFFLER 2020Document12 pagesUS20200318693A1 Electric Axle With Differential Sun Gear Disconnect Clutch - SCHAEFFLER 2020enggtrainee2No ratings yet
- Abrar Rifqi Pratama - Meh - Tugas 3Document15 pagesAbrar Rifqi Pratama - Meh - Tugas 3Abrar RifqiNo ratings yet
- Year2015Volume15 02 20Document6 pagesYear2015Volume15 02 20ankushwreNo ratings yet
- Assignment 1 (2018)Document3 pagesAssignment 1 (2018)Nthabeleng GaringNo ratings yet
- Cube Register W by DSR SiteDocument1 pageCube Register W by DSR Sitekilldude MohanNo ratings yet
- United States Patent (10) Patent No.: US 7,929,500 B2Document13 pagesUnited States Patent (10) Patent No.: US 7,929,500 B2copslockNo ratings yet
- Lembar Skripsi Bab3Document10 pagesLembar Skripsi Bab3IQbalAnggitzRVNo ratings yet
- C5304 - Hydrology (Kertas Soalan Politeknik-Politeknik Malaysia Kejuruteraan Awam)Document7 pagesC5304 - Hydrology (Kertas Soalan Politeknik-Politeknik Malaysia Kejuruteraan Awam)Azil14No ratings yet
- 19FA0037 Bid Bulletin No.2 & Rev BOQDocument4 pages19FA0037 Bid Bulletin No.2 & Rev BOQENGGNo ratings yet
- Department of Civil Engineering Semester: 5 Subject: Hydrology & Water Resources Management Assignment # 3: PrecipitationDocument3 pagesDepartment of Civil Engineering Semester: 5 Subject: Hydrology & Water Resources Management Assignment # 3: PrecipitationHammad Hassan AbdullahNo ratings yet
- Portabatch Corp. San Isidro, Bunawan, Davao City Estimatec Cost For Processing of Three (3) Bldg. PermitsDocument1 pagePortabatch Corp. San Isidro, Bunawan, Davao City Estimatec Cost For Processing of Three (3) Bldg. Permitsrey solideoNo ratings yet
- BLDG CostDocument1 pageBLDG Costrey solideoNo ratings yet
- EP20729488NWB1Document27 pagesEP20729488NWB1compluuytthiex hmjjiuyytNo ratings yet
- Frame Analysis Spreader BeamDocument60 pagesFrame Analysis Spreader BeamIkade SuartanaNo ratings yet
- United States Patent: Weston Et AlDocument13 pagesUnited States Patent: Weston Et AlAlex MungaiNo ratings yet
- United States Patent (10) Patent No.: US 8,294,168 B2Document15 pagesUnited States Patent (10) Patent No.: US 8,294,168 B212348No ratings yet
- Bakti MW Linkbudget 20230705Document2,033 pagesBakti MW Linkbudget 20230705muhammad alibNo ratings yet
- Final Estimate 85Document72 pagesFinal Estimate 85shashirajhans2140No ratings yet
- Surveying Set1 QDocument2 pagesSurveying Set1 QPathipati NarasimharaoNo ratings yet
- Patent Application Publication (10) Pub - No .: US 2020/0102366 A1Document83 pagesPatent Application Publication (10) Pub - No .: US 2020/0102366 A1JagenNo ratings yet
- D1 Ep3571803b1Document114 pagesD1 Ep3571803b1smequixuNo ratings yet
- BOQ - ELE-Solar-018 Ko Min Htet Oo ResidenceDocument1 pageBOQ - ELE-Solar-018 Ko Min Htet Oo ResidenceSai Aung Naing MyintNo ratings yet
- Analytical Exercise Solutions PDFDocument7 pagesAnalytical Exercise Solutions PDFct constructionNo ratings yet
- Microwave Path Data Sheet: NW Area (3) (Calc. 36)Document1 pageMicrowave Path Data Sheet: NW Area (3) (Calc. 36)Le GNo ratings yet
- Efecto en Las Caracteristics OrganolepticasDocument4 pagesEfecto en Las Caracteristics OrganolepticasmilagrosNo ratings yet
- Natura 2000 - Standard Data FormDocument9 pagesNatura 2000 - Standard Data FormDario Fernandez SalasNo ratings yet
- Zero Point Energy Rotator Transducer and Associated Methods US20100201133A1Document12 pagesZero Point Energy Rotator Transducer and Associated Methods US20100201133A1n6YvhCZwyNo ratings yet
- US9664173Document9 pagesUS9664173Muhammad ZahidNo ratings yet
- Alimodian Bridge (Final Estimate) JigzzzDocument14 pagesAlimodian Bridge (Final Estimate) JigzzzJose JacintoNo ratings yet
- Work Programme Jan, Feb, March-2017Document59 pagesWork Programme Jan, Feb, March-2017parvainfratechNo ratings yet
- 13.02.2023 - Quotation Analysis For C523 Naga Laydown Area (With 30 1 Profit Margin)Document1 page13.02.2023 - Quotation Analysis For C523 Naga Laydown Area (With 30 1 Profit Margin)Ellen ProfetaNo ratings yet
- Fault Zone Dynamic Processes: Evolution of Fault Properties During Seismic RuptureFrom EverandFault Zone Dynamic Processes: Evolution of Fault Properties During Seismic RuptureMarion Y. ThomasNo ratings yet
- Integrated Imaging of the Earth: Theory and ApplicationsFrom EverandIntegrated Imaging of the Earth: Theory and ApplicationsMax MoorkampNo ratings yet
- Evaluation of Current Controllers For Distributed GenerationDocument12 pagesEvaluation of Current Controllers For Distributed GenerationKrisDom - InvestorNo ratings yet
- NREL PVGRid Code AnalysisDocument72 pagesNREL PVGRid Code AnalysisKrisDom - InvestorNo ratings yet
- Session10MichaelCoddingtonNREL ReviewDocument30 pagesSession10MichaelCoddingtonNREL ReviewKrisDom - InvestorNo ratings yet
- Acquisition and Review Ofdieselgenerator DataDocument3 pagesAcquisition and Review Ofdieselgenerator DataKrisDom - InvestorNo ratings yet
- Solid-State Control For Reactive Power Compensation and Power Quality Improvement of Wound Field Synchronous Generator-Based Diesel Generator SetsDocument8 pagesSolid-State Control For Reactive Power Compensation and Power Quality Improvement of Wound Field Synchronous Generator-Based Diesel Generator SetsKrisDom - InvestorNo ratings yet
- Fault Ride-Through Requirements For Onshore Wind Power Plants in Europe - The Needs of The Power SystemDocument8 pagesFault Ride-Through Requirements For Onshore Wind Power Plants in Europe - The Needs of The Power SystemKrisDom - InvestorNo ratings yet
- HOMER LectureDocument75 pagesHOMER LectureKrisDom - InvestorNo ratings yet
- Enhanced LVRT Control Strategy For DFIG-based WECS in Weak GridDocument6 pagesEnhanced LVRT Control Strategy For DFIG-based WECS in Weak GridKrisDom - InvestorNo ratings yet
- Code Shift - Grid Specifications and Dynamic Wind Turbine ModelsDocument11 pagesCode Shift - Grid Specifications and Dynamic Wind Turbine ModelsKrisDom - InvestorNo ratings yet
- Determination of Battery Storage Capacity in Energy BufferDocument11 pagesDetermination of Battery Storage Capacity in Energy BufferKrisDom - InvestorNo ratings yet
- Hybrid Micro-Grid Operation Characterisation Based On Stability and Adherence To Grid CodesDocument10 pagesHybrid Micro-Grid Operation Characterisation Based On Stability and Adherence To Grid CodesKrisDom - InvestorNo ratings yet
- VSGpaper TENCON FinalDocument5 pagesVSGpaper TENCON FinalKrisDom - InvestorNo ratings yet
- US20030182250Document16 pagesUS20030182250KrisDom - InvestorNo ratings yet
- US7509261Document12 pagesUS7509261KrisDom - InvestorNo ratings yet
- US20080249667Document35 pagesUS20080249667KrisDom - InvestorNo ratings yet
- Piyush Group 3-2Document40 pagesPiyush Group 3-2Biren PatelNo ratings yet
- Chemical Tanker Familiarization (CTF) : Companies Can Opt For Block BookingDocument1 pageChemical Tanker Familiarization (CTF) : Companies Can Opt For Block BookingSamiulNo ratings yet
- Lesson Plan 3Document3 pagesLesson Plan 3api-547884261No ratings yet
- 02-779 Requirements For 90-10 Copper - Nickel - Alloy Part-3 TubingDocument47 pages02-779 Requirements For 90-10 Copper - Nickel - Alloy Part-3 TubingHattar MNo ratings yet
- Our School Broke Up For The Winter VacationsDocument7 pagesOur School Broke Up For The Winter VacationsprinceNo ratings yet
- JC 1010Document19 pagesJC 1010mcsmiley11No ratings yet
- CERN Courier - Digital EditionDocument33 pagesCERN Courier - Digital EditionFeriferi FerencNo ratings yet
- Underground-Sprayed Concrete BrochureDocument12 pagesUnderground-Sprayed Concrete BrochureEngTamerNo ratings yet
- NCERT Class 7 English Part 1 PDFDocument157 pagesNCERT Class 7 English Part 1 PDFVvs SadanNo ratings yet
- Class VII Half Yearly Maths, M.junaidDocument4 pagesClass VII Half Yearly Maths, M.junaidmohd junaidNo ratings yet
- Pid 14 MT23 160412Document20 pagesPid 14 MT23 160412Amol ChavanNo ratings yet
- 01-15th December, GK Today MagazineDocument134 pages01-15th December, GK Today MagazinejohnNo ratings yet
- AGPT04I-09 Guide To Pavement Technology Part 4I Earthworks MaterialsDocument47 pagesAGPT04I-09 Guide To Pavement Technology Part 4I Earthworks MaterialsLeandroNo ratings yet
- Fisher N551 ESVDocument2 pagesFisher N551 ESVWynn ChoNo ratings yet
- Designing New Vanillin Schiff Bases and Their Antibacterial StudiesDocument4 pagesDesigning New Vanillin Schiff Bases and Their Antibacterial StudiesAvinash PurohitNo ratings yet
- Whitepaper - Loadspreading and SeafasteningDocument3 pagesWhitepaper - Loadspreading and SeafasteningtyuNo ratings yet
- What Is Kpag?: Table of ContentsDocument2 pagesWhat Is Kpag?: Table of Contentsangelito bernalNo ratings yet
- Principles of ForecastingDocument41 pagesPrinciples of Forecastingrajeevseth100% (1)
- Aldehyde Keto. Ncert Book PDFDocument32 pagesAldehyde Keto. Ncert Book PDFAshraf KhanNo ratings yet
- High Risk Neonatal Nursing CareDocument40 pagesHigh Risk Neonatal Nursing Carecarol_cezar100% (2)
- HVT DS HAEFELY RIC 422 Reference Impulse Calibrator V2004Document4 pagesHVT DS HAEFELY RIC 422 Reference Impulse Calibrator V2004leivajNo ratings yet
- Module I: Introduction To Environmental PollutionDocument14 pagesModule I: Introduction To Environmental PollutionAman John TuduNo ratings yet
- Dmbi Assignment 2: Q.1. Explain STAR Schema. Ans-1Document6 pagesDmbi Assignment 2: Q.1. Explain STAR Schema. Ans-1Kanishk TestNo ratings yet
- Formula 1638 Collagen Eye CreamDocument2 pagesFormula 1638 Collagen Eye CreamLinh Sa LaNo ratings yet
- C8 Flyer 2021 Flyer 1Document7 pagesC8 Flyer 2021 Flyer 1SANKET MATHURNo ratings yet
- Nestle SWOT AnalysisDocument3 pagesNestle SWOT AnalysisMubeen AbdulshakoorNo ratings yet