You might also like
- Batch RecordDocument11 pagesBatch RecordInes Concepcion TupasNo ratings yet
- 22-02-13 Samsung Answer To Staton Techniya Complaint & CounterclaimsDocument72 pages22-02-13 Samsung Answer To Staton Techniya Complaint & CounterclaimsFlorian MuellerNo ratings yet
- State Space AnalysisDocument73 pagesState Space AnalysisDevaki V DeviNo ratings yet
- Hanix h15b 2 h15b Plus 2 Service Manual Sept 09Document10 pagesHanix h15b 2 h15b Plus 2 Service Manual Sept 09vickie100% (41)
- State Observers For Different Types of SystemsDocument7 pagesState Observers For Different Types of SystemsLong Trần ĐứcNo ratings yet
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDocument10 pagesMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNo ratings yet
- Closed-loop control system block diagramDocument41 pagesClosed-loop control system block diagramTing SamuelNo ratings yet
- Sliding Mode-: Modulation Control of A "Buck" ConverterDocument6 pagesSliding Mode-: Modulation Control of A "Buck" ConverterFarag AlargtNo ratings yet
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- Block Diagrams - Lecture NotesDocument8 pagesBlock Diagrams - Lecture NotesMichael HsiaoNo ratings yet
- ELG4152L305Document33 pagesELG4152L305Rahul GalaNo ratings yet
- Nonlinear Phenomena in Pulse Width Modulated Feedback Controlled SystemsDocument6 pagesNonlinear Phenomena in Pulse Width Modulated Feedback Controlled SystemsDipanjan DasNo ratings yet
- State SpaceDocument101 pagesState SpaceShivam AroraNo ratings yet
- Transfer Functions and Block Diagrams PDFDocument21 pagesTransfer Functions and Block Diagrams PDFJuliana NepembeNo ratings yet
- State Variable ModelsDocument13 pagesState Variable Modelsali alaaNo ratings yet
- Mathematical Modeling Using State SpaceDocument11 pagesMathematical Modeling Using State Spacetarekegn utaNo ratings yet
- Luenberger ObserversDocument4 pagesLuenberger ObserversMariam YaseenNo ratings yet
- Ee 469Document39 pagesEe 469arwa zeglamNo ratings yet
- SysRespCh2Document26 pagesSysRespCh2jef_aernoutsNo ratings yet
- 45 - 70685 - EE411 - 2013 - 1 - 1 - 1 - Control System I-State SpaceDocument84 pages45 - 70685 - EE411 - 2013 - 1 - 1 - 1 - Control System I-State SpaceSwifty SpotNo ratings yet
- CS AnsDocument8 pagesCS Anssubham subhashisNo ratings yet
- Simulink Basics TutorialDocument143 pagesSimulink Basics TutorialHiếu HuỳnhNo ratings yet
- Transfer Function: FOR Discrete Lti SystemDocument38 pagesTransfer Function: FOR Discrete Lti SystemKrishn LimbachiyaNo ratings yet
- Full-State Feedback & Observer DesignDocument29 pagesFull-State Feedback & Observer DesignBi Chen100% (1)
- Introduction To Linear Control System PDFDocument13 pagesIntroduction To Linear Control System PDFAmitava BiswasNo ratings yet
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaDocument120 pagesProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçNo ratings yet
- Mathematical ModellingDocument36 pagesMathematical ModellingMohd Fazli100% (2)
- Dynamical System Modelling ChapterDocument28 pagesDynamical System Modelling ChapterOloyede JeremiahNo ratings yet
- Chap 2Document54 pagesChap 2kamlesh1714No ratings yet
- An Optimal Control of A Second-Order Under-Damped SystemDocument3 pagesAn Optimal Control of A Second-Order Under-Damped SystemÁngeles Campaña OlmosNo ratings yet
- Lect Note 1 IntroDocument28 pagesLect Note 1 IntroJie RongNo ratings yet
- ps3 (1) From MAE 4780Document5 pagesps3 (1) From MAE 4780fooz10No ratings yet
- From Classical To State-Feedback-Based Controllers: Lecture NotesDocument10 pagesFrom Classical To State-Feedback-Based Controllers: Lecture Notesomarportillo123456No ratings yet
- Automatic Control ExerciseDocument140 pagesAutomatic Control Exercisetaile1995No ratings yet
- Modelagem Diagrama de BlocsoDocument12 pagesModelagem Diagrama de BlocsoAlessandro BraatzNo ratings yet
- Lab 03 Simulink 2018 Part 2Document12 pagesLab 03 Simulink 2018 Part 2Reem GheithNo ratings yet
- Lec 07Document25 pagesLec 07api-247714257No ratings yet
- MODELING LINEAR SYSTEMSDocument39 pagesMODELING LINEAR SYSTEMSFreyley LeyvaNo ratings yet
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlDocument14 pagesMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloNo ratings yet
- Modern Control Theory and It'S ApplicationsDocument9 pagesModern Control Theory and It'S ApplicationsMohamed ShamseldeinNo ratings yet
- SEEA1602Document230 pagesSEEA1602Dilli harshaNo ratings yet
- Laplace Transform (Notes)Document23 pagesLaplace Transform (Notes)Alex OsesNo ratings yet
- State Variable Analysis ExplainedDocument75 pagesState Variable Analysis Explainedprabhabathi deviNo ratings yet
- State and State SpaceDocument76 pagesState and State Spacesohaib389892No ratings yet
- Project Fall2015Document5 pagesProject Fall2015AlvinNo ratings yet
- 16 Control Fundamentals: (Continued On Next Page)Document8 pages16 Control Fundamentals: (Continued On Next Page)viteliof4110No ratings yet
- State and Output FeedbackDocument30 pagesState and Output FeedbackAhmad ElsheemyNo ratings yet
- Three Position ControlDocument4 pagesThree Position ControlMaciejNo ratings yet
- Introduction To System Modeling: Dynamic System Input U (T) Output y (T)Document19 pagesIntroduction To System Modeling: Dynamic System Input U (T) Output y (T)ettypasewangNo ratings yet
- Chap-3 Time Domain ModelDocument29 pagesChap-3 Time Domain ModelFurkan DedeNo ratings yet
- Control Systems EngineeringDocument32 pagesControl Systems EngineeringSingappuli100% (2)
- Lecture 3 - Chapter 3 (Modeling in The Time Domain)Document57 pagesLecture 3 - Chapter 3 (Modeling in The Time Domain)Jessiedee Mark GingoNo ratings yet
- System Modeling MethodsDocument51 pagesSystem Modeling MethodsJerc ZajNo ratings yet
- Versuch 3tankDocument16 pagesVersuch 3tankMadalina GheorgheNo ratings yet
- Design of A Controller For A DC MotorDocument11 pagesDesign of A Controller For A DC Motormarcalomar19No ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet
- Discrete Event Systems in Dioid Algebra and Conventional AlgebraFrom EverandDiscrete Event Systems in Dioid Algebra and Conventional AlgebraNo ratings yet
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")From EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Rating: 4 out of 5 stars4/5 (2)
- MODELING CONTROL SYSTEMSDocument11 pagesMODELING CONTROL SYSTEMSAnonymous UrzdtCB0INo ratings yet
- P 4Document3 pagesP 4Anonymous UrzdtCB0INo ratings yet
- Variables, lists, dictionaries and objects in Python codeDocument4 pagesVariables, lists, dictionaries and objects in Python codeAnonymous UrzdtCB0INo ratings yet
- Locate Hackers Using Python IP GeolocationDocument3 pagesLocate Hackers Using Python IP GeolocationAnonymous UrzdtCB0INo ratings yet
- P 3Document2 pagesP 3Anonymous UrzdtCB0INo ratings yet
- Math 4Document23 pagesMath 4Anonymous UrzdtCB0INo ratings yet
- If The Grammar G Is Given by The Productions SDocument12 pagesIf The Grammar G Is Given by The Productions SAnonymous UrzdtCB0INo ratings yet
- P 2Document2 pagesP 2Anonymous UrzdtCB0INo ratings yet
- Math 5Document37 pagesMath 5Anonymous UrzdtCB0INo ratings yet
- Began Fortifying The Houses They OccupiedDocument5 pagesBegan Fortifying The Houses They OccupiedAnonymous UrzdtCB0INo ratings yet
- CirclesDocument11 pagesCirclesAnonymous UrzdtCB0INo ratings yet
- Proudhon's analysis of property and justice in his early work 'What is PropertyDocument13 pagesProudhon's analysis of property and justice in his early work 'What is PropertyAnonymous UrzdtCB0INo ratings yet
- The Bogus DilemmaDocument7 pagesThe Bogus DilemmaAnonymous UrzdtCB0INo ratings yet
- The Bogus DilemmaDocument7 pagesThe Bogus DilemmaAnonymous UrzdtCB0INo ratings yet
- PaoliDocument5 pagesPaoliAnonymous UrzdtCB0INo ratings yet
- His Next Significant Composition Was SurDocument2 pagesHis Next Significant Composition Was SurAnonymous UrzdtCB0INo ratings yet
- 1790 and 1791 The Paolists Had Won Victory After VictoryDocument4 pages1790 and 1791 The Paolists Had Won Victory After VictoryAnonymous UrzdtCB0INo ratings yet
- Everyday CourageDocument4 pagesEveryday CourageAnonymous UrzdtCB0INo ratings yet
- Napoleon Advocated Stern Measures Against The IslandDocument5 pagesNapoleon Advocated Stern Measures Against The IslandAnonymous UrzdtCB0INo ratings yet
- Every Summer An Examiner Came To The Military School To Test ArtilleryDocument6 pagesEvery Summer An Examiner Came To The Military School To Test ArtilleryAnonymous UrzdtCB0INo ratings yet
- Napoleon and His Three SchoolfellowsDocument5 pagesNapoleon and His Three SchoolfellowsAnonymous UrzdtCB0INo ratings yet
- Brienne AnywayDocument3 pagesBrienne AnywayAnonymous UrzdtCB0INo ratings yet
- On I 5 December 1779 A Veritable Cohort of Buonapartes Left CorsicaDocument10 pagesOn I 5 December 1779 A Veritable Cohort of Buonapartes Left CorsicaAnonymous UrzdtCB0INo ratings yet
- Napoleon Left The Ecole Royale MilitaireDocument8 pagesNapoleon Left The Ecole Royale MilitaireAnonymous UrzdtCB0INo ratings yet
- Marcus Aurelius Is Said To Have Been Fond of Quoting PlatoDocument6 pagesMarcus Aurelius Is Said To Have Been Fond of Quoting PlatoAnonymous UrzdtCB0INo ratings yet
- Napoleon Into An Artilleryman NonpareilDocument4 pagesNapoleon Into An Artilleryman NonpareilAnonymous UrzdtCB0INo ratings yet
- A Study GuideDocument6 pagesA Study GuideAnonymous UrzdtCB0INo ratings yet
- This Is The First of A Series of Books For The University of Cambridge InternationalDocument19 pagesThis Is The First of A Series of Books For The University of Cambridge InternationalAnonymous UrzdtCB0INo ratings yet
- FDocument11 pagesFAnonymous UrzdtCB0INo ratings yet
- Squidpy: A Scalable Framework For Spatial Omics Analysis: ArticlesDocument14 pagesSquidpy: A Scalable Framework For Spatial Omics Analysis: ArticlesXin XuNo ratings yet
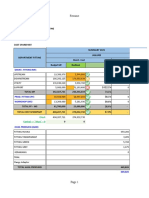
- Resume summary of monthly sparepart costs and production in 2021Document590 pagesResume summary of monthly sparepart costs and production in 2021winda listya ningrumNo ratings yet
- Jenny Randles - Mind Monsters - Invaders From Inner Space (1990)Document219 pagesJenny Randles - Mind Monsters - Invaders From Inner Space (1990)DirkTheDaring11100% (15)
- RV RVR en 0714 Edit PDFDocument6 pagesRV RVR en 0714 Edit PDFJacques FerreiraNo ratings yet
- IEU - BBA - Final Project - Business Plan - Guidelines and Requirements - v02.07Document11 pagesIEU - BBA - Final Project - Business Plan - Guidelines and Requirements - v02.07Jorge Eduardo Ortega PalaciosNo ratings yet
- Guia Instalacion ENTECDocument15 pagesGuia Instalacion ENTECHislim SaidNo ratings yet
- QP 7721-Sobha-B+g+8-2town-Pahse IiDocument2 pagesQP 7721-Sobha-B+g+8-2town-Pahse IirajatNo ratings yet
- Solve Equations and InequalitiesDocument13 pagesSolve Equations and InequalitiesFons Roxas-ChuaNo ratings yet
- Advanced Long Range Proximity Reader PDFDocument1 pageAdvanced Long Range Proximity Reader PDFPhangkie RecolizadoNo ratings yet
- EPFO Declaration FormDocument4 pagesEPFO Declaration FormSiddharth PednekarNo ratings yet
- Dyno InstructionsDocument2 pagesDyno InstructionsAlicia CarrNo ratings yet
- TMF1014 System Analysis & Design Semester 1, 2020/2021 APPENDIX C: Group Assignment Assessment RubricDocument4 pagesTMF1014 System Analysis & Design Semester 1, 2020/2021 APPENDIX C: Group Assignment Assessment RubricWe XaNo ratings yet
- Chapter 5Document31 pagesChapter 5Marvin VinasNo ratings yet
- ks20201 Sample Questions Psycholinguistics Module3Document6 pagesks20201 Sample Questions Psycholinguistics Module3Anurag TiwariNo ratings yet
- K220 Accessories BrochureDocument6 pagesK220 Accessories Brochurehh8g9y6ggcNo ratings yet
- Foundation Fieldbus: Dataguard™ - Iec61158-2 - Isa/Sp50 - Type A - Extended TemperatureDocument1 pageFoundation Fieldbus: Dataguard™ - Iec61158-2 - Isa/Sp50 - Type A - Extended TemperatureJosé CallisayaNo ratings yet
- Blood Smear PreparationDocument125 pagesBlood Smear PreparationKim RuizNo ratings yet
- GE 5 Purposive Communication Course OverviewDocument10 pagesGE 5 Purposive Communication Course OverviewHarold LuceroNo ratings yet
- Lesson 4 - Nature of The Speech Communication ProcessDocument4 pagesLesson 4 - Nature of The Speech Communication ProcessDon Miguel SpokesNo ratings yet
- Sa Sem Iv Assignment 1Document2 pagesSa Sem Iv Assignment 1pravin rathodNo ratings yet
- SpinView Getting StartedDocument16 pagesSpinView Getting StartedRicardo SequeiraNo ratings yet
- P0880 TCM Power Circuit InspectionDocument5 pagesP0880 TCM Power Circuit InspectionLojan Coronel José HumbertoNo ratings yet
- CPC-COM-SU-4743-G External CoatingsDocument24 pagesCPC-COM-SU-4743-G External Coatingsaslam.amb100% (1)
- BfgsDocument10 pagesBfgshusseinNo ratings yet
- Quadratic SDocument22 pagesQuadratic SShawn ShibuNo ratings yet
- TMDI Lesson Plan in Storing and Reconstituting StocksDocument5 pagesTMDI Lesson Plan in Storing and Reconstituting StocksDiane VillNo ratings yet
- 9607 Syllabus Media StudiesDocument28 pages9607 Syllabus Media StudiesmisterNo ratings yet