You might also like
- Lampiran 1. Turunan Pertama Fungsi Log-Likelihood Terhadap ParameterDocument22 pagesLampiran 1. Turunan Pertama Fungsi Log-Likelihood Terhadap ParameterChristian BerenNo ratings yet
- 课本附录 (二) - 公式表 Formula Sheet - finalDocument2 pages课本附录 (二) - 公式表 Formula Sheet - finalluoyifei1988No ratings yet
- Time Series Formula orDocument4 pagesTime Series Formula or2B Dai Ko DUPLICATENo ratings yet
- Formulario 2 EstadisticaDocument2 pagesFormulario 2 EstadisticaSebastian EchavarriaNo ratings yet
- Chapter 14 Complex IntegrationDocument26 pagesChapter 14 Complex Integrationayewinko143No ratings yet
- EjemploDocument5 pagesEjemploAngel Martinez NavaNo ratings yet
- Solution 6Document2 pagesSolution 6jailanipettaiNo ratings yet
- TM CM L11 4 PDFDocument1 pageTM CM L11 4 PDFsayandatta1No ratings yet
- IRH ProjectDocument19 pagesIRH ProjectIvan Sanchez100% (2)
- Formulario Calculo VerctorialDocument2 pagesFormulario Calculo VerctorialKEILA MERCADO MARTINEZNo ratings yet
- Formulario CalculoVectorialDocument2 pagesFormulario CalculoVectorialClaymohrNo ratings yet
- HW2 - Reliability Analysis: AnswerDocument6 pagesHW2 - Reliability Analysis: AnswerYen-Jen ChangNo ratings yet
- Cheat SheetDocument6 pagesCheat SheetmaykelnawarNo ratings yet
- Numerical - Method-PPT Final 1Document92 pagesNumerical - Method-PPT Final 1Md.Hasibur RahmanNo ratings yet
- ELEN3012 Quizz 3 SolutionDocument5 pagesELEN3012 Quizz 3 SolutionBongani MofokengNo ratings yet
- Exam P Formula Sheet PDFDocument9 pagesExam P Formula Sheet PDFQuang NguyenNo ratings yet
- Experiment 3Document12 pagesExperiment 3Sayaf KhanNo ratings yet
- Ut FSMDocument147 pagesUt FSMCarito SPNo ratings yet
- Pure Mathematics Formula SpecDocument33 pagesPure Mathematics Formula SpecSubaproNo ratings yet
- A2 Pure Math NotesDocument7 pagesA2 Pure Math NotesSHREYA NARANGNo ratings yet
- EEE 147 ReviewerDocument4 pagesEEE 147 Reviewerfrancojieo27No ratings yet
- Sinais e Sistemas - UFLA Atividade Remota 3Document4 pagesSinais e Sistemas - UFLA Atividade Remota 3MarcosNo ratings yet
- Lecture 8 BackpropagationDocument28 pagesLecture 8 BackpropagationHodatama Karanna OneNo ratings yet
- Balance Del Proceso: Nomenclatura Del ProcesoDocument5 pagesBalance Del Proceso: Nomenclatura Del ProcesoAnonymous odl3MBNo ratings yet
- Table of Laplace TransformsDocument1 pageTable of Laplace TransformsEvan AndersenNo ratings yet
- Discrete Uniform DistributionDocument7 pagesDiscrete Uniform DistributionRani GarginalNo ratings yet
- DR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesDocument4 pagesDR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesIsmael hijaziNo ratings yet
- Fórmulas de Deriv y DiferenDocument2 pagesFórmulas de Deriv y DiferenRaphael de Jesus Diaz OcampoNo ratings yet
- Beta Gamma Function Unit IDocument16 pagesBeta Gamma Function Unit IDhiren PanditNo ratings yet
- Session16 Recursive Systems IdentificationDocument6 pagesSession16 Recursive Systems IdentificationSamantha Márquez SernaNo ratings yet
- Formulas Básicas de DerivacionDocument1 pageFormulas Básicas de Derivacionsanyga2006No ratings yet
- Final Formula SheetDocument4 pagesFinal Formula SheetBerkay EkenNo ratings yet
- Solution of Partial DifferentialDocument13 pagesSolution of Partial DifferentialHaseeb AhmedNo ratings yet
- ( ) : ( ) ( - ) ( - ) Máxima SimilitudDocument1 page( ) : ( ) ( - ) ( - ) Máxima SimilitudErick XavierNo ratings yet
- Wzory 1 Rachunek Prawdopodobieństwa EKADDocument2 pagesWzory 1 Rachunek Prawdopodobieństwa EKADАня КербедьNo ratings yet
- SL Maths 1 Page Formula SheetDocument1 pageSL Maths 1 Page Formula SheetpriyaNo ratings yet
- ACTL30004 AssignmentDocument15 pagesACTL30004 AssignmentKeshavNo ratings yet
- Formulario PDFDocument1 pageFormulario PDFCristina Huañapaco GutierrezNo ratings yet
- Jing - Poverty Dynamics and Vulnerability To Poverty An Empirical Analysis Using General Household SurveysDocument16 pagesJing - Poverty Dynamics and Vulnerability To Poverty An Empirical Analysis Using General Household SurveysNova TambunanNo ratings yet
- Formulario GeneralDocument2 pagesFormulario GeneralMaria LmNo ratings yet
- IB Maths SL Formula Sheet 2019Document1 pageIB Maths SL Formula Sheet 2019Surya KarthikeyanNo ratings yet
- Formulario Cálculo Diferencial: Leyes de Los Exponentes Logaritmos Razones TrigonométricasDocument1 pageFormulario Cálculo Diferencial: Leyes de Los Exponentes Logaritmos Razones TrigonométricasJoel GonzalezNo ratings yet
- Resonancia Circuitos RLCDocument9 pagesResonancia Circuitos RLCEddyNo ratings yet
- Transformada de LaplaceDocument3 pagesTransformada de LaplaceSantiago Arias MedinaNo ratings yet
- EDA - FormulaDocument2 pagesEDA - FormulaLyka Mae MancolNo ratings yet
- Formulario Administración Integral de YacimientosDocument3 pagesFormulario Administración Integral de Yacimientostomhands07No ratings yet
- Formulari 2023-24Document2 pagesFormulari 2023-24agraciabalaguerNo ratings yet
- Financial Statistics - Formula SheetDocument26 pagesFinancial Statistics - Formula Sheetale.ili.pauNo ratings yet
- Shrutanik Chatterjee - 34230822046 - Machine Learning ApplicationsDocument8 pagesShrutanik Chatterjee - 34230822046 - Machine Learning ApplicationsBinit KarmakarNo ratings yet
- Formulario Actualizado 2019Document1 pageFormulario Actualizado 2019Luis Angel AFNo ratings yet
- Example of Implicit Method To Solve PdesDocument5 pagesExample of Implicit Method To Solve PdesKhayrouMezerregNo ratings yet
- Formula Sheet For ESE in CVT Fall 2022 Semester Updated On 1-1-2023Document4 pagesFormula Sheet For ESE in CVT Fall 2022 Semester Updated On 1-1-2023Zain AhmedNo ratings yet
- Formula SheetDocument4 pagesFormula SheetYuri ParkNo ratings yet
- Equation SheetDocument1 pageEquation SheetOmar KassemNo ratings yet
- Problems On DTFT DFT and IDTFTDocument3 pagesProblems On DTFT DFT and IDTFTSalsabill Hamed64No ratings yet
- Chapter 2: Axioms of ProbabilityDocument8 pagesChapter 2: Axioms of ProbabilityAmir VahdaniNo ratings yet
- Pemodelan Soal 1Document4 pagesPemodelan Soal 1andyahNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Test B2: Example: O A Because of B As For C Since D As A ResultDocument5 pagesTest B2: Example: O A Because of B As For C Since D As A ResultAgrigoroaiei IonelNo ratings yet
- Life of Tamav Irene (English)Document64 pagesLife of Tamav Irene (English)YonasNo ratings yet
- Test 5-11-2019 Excretory System - Pharmacist Zaheer AbbasDocument3 pagesTest 5-11-2019 Excretory System - Pharmacist Zaheer AbbasabbaszaheerNo ratings yet
- Martin HeideggerDocument29 pagesMartin HeideggerAljon AniesNo ratings yet
- Spring 2019 PDFDocument56 pagesSpring 2019 PDFMayyage LokayaNo ratings yet
- Moc3052 PDFDocument9 pagesMoc3052 PDFHernan JavierNo ratings yet
- PWSMTS Full Test - 01 - Test PaperDocument9 pagesPWSMTS Full Test - 01 - Test PaperPranav kr. PrasadNo ratings yet
- Key Topics in PSM by DR Vivek JainDocument5 pagesKey Topics in PSM by DR Vivek Jaindocvivekjain100% (4)
- Warning: Millennium Controller MC Series Installation and Operation ManualDocument28 pagesWarning: Millennium Controller MC Series Installation and Operation ManualHashemAliHashemNo ratings yet
- Integral AKDocument22 pagesIntegral AKkatherine anne ortiz100% (1)
- Notes:: Grate IDocument1 pageNotes:: Grate IAfuye Oluyemi IbiyinkaNo ratings yet
- EMD Tools1Document55 pagesEMD Tools1Vladimir ArsicNo ratings yet
- 2019 Iran PPRDocument10 pages2019 Iran PPRFareena FatimaNo ratings yet
- Electrical DrivesDocument1 pageElectrical DriveschaitanayNo ratings yet
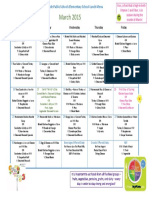
- Seaside Elementary School Lunch Menu LewisDocument1 pageSeaside Elementary School Lunch Menu Lewisapi-345910065No ratings yet
- ASC - General - Purpose - Capacitor For HallsensorDocument19 pagesASC - General - Purpose - Capacitor For HallsensorLusiNo ratings yet
- T1001W6F011Document1 pageT1001W6F011Asim SaleemNo ratings yet
- InvoiceDocument1 pageInvoiceRohankant TateluNo ratings yet
- Resume: Ajesh Kumar VishwakarmaDocument2 pagesResume: Ajesh Kumar VishwakarmaSHRI SAI AASS ENTERPRISESNo ratings yet
- Et3491 Esiot LabDocument95 pagesEt3491 Esiot LabfreefireyomaNo ratings yet
- Abnormal Lie in PregnancyDocument2 pagesAbnormal Lie in PregnancyAlexander EnnesNo ratings yet
- Amazon Amz-L81 - Compal La-3161p Hel80 - Rev 0Document43 pagesAmazon Amz-L81 - Compal La-3161p Hel80 - Rev 0Andre BigoNo ratings yet
- The Impact of VGM (Verified Gross Mass) Implementation As Solas'S New Regulation - Case Study at Port of TG - PriokDocument11 pagesThe Impact of VGM (Verified Gross Mass) Implementation As Solas'S New Regulation - Case Study at Port of TG - PriokDilip SharmaNo ratings yet
- TraderJoes CookbookDocument150 pagesTraderJoes Cookbookjennifer.farris12No ratings yet
- Spa 20008080VDocument1 pageSpa 20008080Vmichele DSNo ratings yet
- Tanuj Ghimire - CVDocument4 pagesTanuj Ghimire - CVsujankhanal10No ratings yet
- Ebook Physics of Cryogenics An Ultralow Temperature Phenomenon PDF Full Chapter PDFDocument67 pagesEbook Physics of Cryogenics An Ultralow Temperature Phenomenon PDF Full Chapter PDFlouise.fleming716100% (25)
- Technical Information ASSET DOC LOC 17687504Document23 pagesTechnical Information ASSET DOC LOC 17687504SuparnoNo ratings yet
- Advanced IC Engines: Prof. R. Devaraj Dr. S. Ramachandran Dr. A. AndersonDocument61 pagesAdvanced IC Engines: Prof. R. Devaraj Dr. S. Ramachandran Dr. A. AndersonGopi KrishnanNo ratings yet
- 87359322las BodyDocument336 pages87359322las BodyMichel KennedyNo ratings yet