You might also like
- Link Budget Calculation: Assignment #2Document9 pagesLink Budget Calculation: Assignment #2Sohaib Alee Khan NagreeNo ratings yet
- 6X52 - 7250kW - 85rpm - Delta Bypass TuningDocument25 pages6X52 - 7250kW - 85rpm - Delta Bypass TuningParis AndreadisNo ratings yet
- 6X52 - 7250kW - 85rpm - Low Load TuningDocument25 pages6X52 - 7250kW - 85rpm - Low Load TuningParis AndreadisNo ratings yet
- 1.DY 23 ROBIN ENGINE Loop Test (13-05-2021)Document2 pages1.DY 23 ROBIN ENGINE Loop Test (13-05-2021)PiyushNo ratings yet
- Mission Specification For A Jet TransportDocument24 pagesMission Specification For A Jet TransportAdha LuriNo ratings yet
- Datasheet QSC83Document2 pagesDatasheet QSC83Thành DanhNo ratings yet
- Accepance Testing HI-TRAC HSWIM (Aug-04)Document8 pagesAccepance Testing HI-TRAC HSWIM (Aug-04)May InNo ratings yet
- CMCR and Engine Operating Curves: Rating FieldDocument26 pagesCMCR and Engine Operating Curves: Rating FieldFilipe SouzaNo ratings yet
- Case Problem: Metropolitan Research, Inc.: Managerial ReportDocument3 pagesCase Problem: Metropolitan Research, Inc.: Managerial ReportShubham PalNo ratings yet
- Metropolitan Research Inc. Case StudyDocument6 pagesMetropolitan Research Inc. Case StudyADITYA VERMANo ratings yet
- CMCR and Engine Operating Curves: Rating FieldDocument24 pagesCMCR and Engine Operating Curves: Rating FieldmanuNo ratings yet
- Comparison of R1S25M1Document5 pagesComparison of R1S25M1AMIRNo ratings yet
- Cost Analysis 1Document2 pagesCost Analysis 1pranith1000No ratings yet
- Lab 6 Electric Network AnalysisDocument8 pagesLab 6 Electric Network AnalysisMuzammil SohailNo ratings yet
- Caterpillar DozerDocument1 pageCaterpillar DozerAgung ArdhanaNo ratings yet
- Load - Test Report - Bridge No. 25Document4 pagesLoad - Test Report - Bridge No. 25yaswanthNo ratings yet
- Altitude Simulation For Transportation Testing of Packaging: Note # 09-24Document2 pagesAltitude Simulation For Transportation Testing of Packaging: Note # 09-24RajeshNo ratings yet
- Antrm Solenoid ValveDocument2 pagesAntrm Solenoid ValveWowShopNo ratings yet
- Selection: Semi-Hermetic Reciprocating Compressors: Input ValuesDocument5 pagesSelection: Semi-Hermetic Reciprocating Compressors: Input ValuesABimportaciones ABNo ratings yet
- Universiti Teknologi Mara Fakulti Kejuruteraan Kimia Process Simulation Laboratory (CPE613)Document8 pagesUniversiti Teknologi Mara Fakulti Kejuruteraan Kimia Process Simulation Laboratory (CPE613)fullmoonNo ratings yet
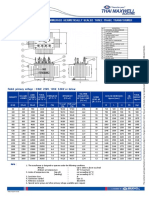
- 03.technical Data of Oil-Immersed Hermetically Sealed TransformerDocument2 pages03.technical Data of Oil-Immersed Hermetically Sealed TransformerMachanical PtwitNo ratings yet
- 03.technical Data of Oil-Immersed Hermetically Sealed TransformerDocument2 pages03.technical Data of Oil-Immersed Hermetically Sealed TransformerMachanical PtwitNo ratings yet
- CL 232 Chemical Engineering Lab-1 (2019) : R&P TA Initials With DateDocument11 pagesCL 232 Chemical Engineering Lab-1 (2019) : R&P TA Initials With DateManish SaichNo ratings yet
- Ee-222 Electric Machines Lab: G Raghunath 170020025, Uday Singh Meena 170020014Document5 pagesEe-222 Electric Machines Lab: G Raghunath 170020025, Uday Singh Meena 170020014Gopavaram RaghunathNo ratings yet
- Term Paper (The Optomizers)Document9 pagesTerm Paper (The Optomizers)আহনাফ গালিবNo ratings yet
- PEC 2019 Design GuidelinesDocument9 pagesPEC 2019 Design GuidelinesHendrix LevaNo ratings yet
- Basic EVT1Document30 pagesBasic EVT1Thamizh selvanNo ratings yet
- Load Sharing: 82686 (Rev. C)Document2 pagesLoad Sharing: 82686 (Rev. C)3efooNo ratings yet
- Cat Electronic Technician 2015A v1.0 Product Status ReportDocument4 pagesCat Electronic Technician 2015A v1.0 Product Status Reportrapha raphaNo ratings yet
- Three Winding Transformer Test System-EPRI-2017-Rev4Document18 pagesThree Winding Transformer Test System-EPRI-2017-Rev4Jorge TorresNo ratings yet
- TS B3 SeriesDocument4 pagesTS B3 SeriesGuadalupe CondoriNo ratings yet
- Technical Data Sheet 50EPM, 60EPMDocument1 pageTechnical Data Sheet 50EPM, 60EPMkwstdbjp5fNo ratings yet
- GFM 600hesDocument2 pagesGFM 600heschee wy100% (1)
- SNAP Practice: One. 1 Mass System AnalysisDocument3 pagesSNAP Practice: One. 1 Mass System AnalysisRika SakaiNo ratings yet
- Td1210g Volvo PentaDocument2 pagesTd1210g Volvo PentaMaría Rosa Tomapasca0% (1)
- SNAP Practice: One. 1 Mass System AnalysisDocument3 pagesSNAP Practice: One. 1 Mass System AnalysisRika SakaiNo ratings yet
- H2SO4 14M 9V - Theta - 2-ThetaDocument22 pagesH2SO4 14M 9V - Theta - 2-Thetaumi mulyaniNo ratings yet
- Test Report Panel 62x62 Certa Driver PhilipsDocument3 pagesTest Report Panel 62x62 Certa Driver PhilipsDao QuangNo ratings yet
- Balancing Tip # 105 C D International, IncDocument3 pagesBalancing Tip # 105 C D International, IncAnonymous PVXBGg9TNo ratings yet
- Modular Conveying System With DC Roller Drive From Impel Intralogistics - IndiaDocument9 pagesModular Conveying System With DC Roller Drive From Impel Intralogistics - IndiaImpel IntralogisticsNo ratings yet
- 10 - Equipment Damage Curves Motors PDFDocument5 pages10 - Equipment Damage Curves Motors PDFMoulay m'hammed LOUKILINo ratings yet
- 300W Medical/ITE Class I and II External Power Supplies: Features BenefitsDocument4 pages300W Medical/ITE Class I and II External Power Supplies: Features BenefitsValerio GalieniNo ratings yet
- 23 Automatic TransmissionDocument43 pages23 Automatic Transmissiondudurez50% (2)
- GTP - Eff 1 Endura SeriesDocument11 pagesGTP - Eff 1 Endura SeriesNaveen GuptaNo ratings yet
- "Contingency Analysis of Power System": A Presentation ONDocument16 pages"Contingency Analysis of Power System": A Presentation ONAnish PoudelNo ratings yet
- Motor 2.5 HP - ShakersDocument2 pagesMotor 2.5 HP - ShakersAlex SinissNo ratings yet
- Traffic Speed StudyDocument19 pagesTraffic Speed StudyMd. Abdullah Al ArafatNo ratings yet
- D&D CS1 Pes1202202920 PDFDocument6 pagesD&D CS1 Pes1202202920 PDFmohammed yaseenNo ratings yet
- Chapter 4: Resistance To Progress of A Vehicle - Measurement Method On The Road - Simulation On A Chassis DynamometerDocument12 pagesChapter 4: Resistance To Progress of A Vehicle - Measurement Method On The Road - Simulation On A Chassis DynamometerManikanta SwamyNo ratings yet
- 9 - Equipment Damage Curves Generators PDFDocument4 pages9 - Equipment Damage Curves Generators PDFMoulay m'hammed LOUKILINo ratings yet
- API Engine Oil Classifications 2010Document6 pagesAPI Engine Oil Classifications 2010amsoilromaniaNo ratings yet
- 60 Test SummaryDocument10 pages60 Test SummaryIan SnowNo ratings yet
- TNM GSM Swap Project Optimization Report - Cluster - 2Document17 pagesTNM GSM Swap Project Optimization Report - Cluster - 2fazadoNo ratings yet
- Technical Specification of The Single Phase Distribution TransformaersDocument10 pagesTechnical Specification of The Single Phase Distribution Transformaerschristian frutoNo ratings yet
- Haulage Trucks 953Document7 pagesHaulage Trucks 953Muhammad Syukri YusaNo ratings yet
- ProjectSizing ReportDocument2 pagesProjectSizing ReportSami BabikerNo ratings yet
- Cummins QSB 5.9 SheetDocument2 pagesCummins QSB 5.9 SheetDaniel Perez100% (1)
- DC ServoDocument11 pagesDC ServojeevanNo ratings yet
- Zylon OverviewDocument2 pagesZylon OverviewJennifer ReynoldsNo ratings yet
- Muratori Thesis PDFDocument185 pagesMuratori Thesis PDFJennifer ReynoldsNo ratings yet
- 00002182-A01 - M21RX-19 DatasheetDocument2 pages00002182-A01 - M21RX-19 DatasheetJennifer ReynoldsNo ratings yet
- 00001396-B03 - M21PX-19 DatasheetDocument2 pages00001396-B03 - M21PX-19 DatasheetJennifer ReynoldsNo ratings yet
- LAUDA UC4 L003511 en 20220714 113621Document3 pagesLAUDA UC4 L003511 en 20220714 113621Jennifer ReynoldsNo ratings yet
- Condenser Data PDFDocument1 pageCondenser Data PDFJennifer ReynoldsNo ratings yet
- ToughSteel Kajberg PDFDocument16 pagesToughSteel Kajberg PDFJennifer ReynoldsNo ratings yet
- Man TgeDocument24 pagesMan Tgejorge torresNo ratings yet
- LandroverDocument22 pagesLandroverUnderatedNo ratings yet
- Market Monitor: European Passenger Car Registrations, January-August 2020Document4 pagesMarket Monitor: European Passenger Car Registrations, January-August 2020The International Council on Clean TransportationNo ratings yet
- Conversion Factors 2020 - Full Set For Advanced UsersDocument112 pagesConversion Factors 2020 - Full Set For Advanced UsersMelissa Giovanna Ibarra SalasNo ratings yet
- Polestar 2 - Specifications: Long Range Single Motor Long Range Dual Motor VersionsDocument5 pagesPolestar 2 - Specifications: Long Range Single Motor Long Range Dual Motor Versionsjunior arellanoNo ratings yet
- Mendeley Data - Lowbrasys Brake Wear Cycle - 3h LACTDocument3 pagesMendeley Data - Lowbrasys Brake Wear Cycle - 3h LACTMini VargheseNo ratings yet
- Moteur VehiculeDocument32 pagesMoteur VehiculeMouna MorchidNo ratings yet
- New Peugeot Traveller Spec Sheet.207607Document14 pagesNew Peugeot Traveller Spec Sheet.207607CgghyNo ratings yet
- Nissan Leaf BrochureDocument31 pagesNissan Leaf BrochureYudyChenNo ratings yet
- SHINERAY X30L EV BrochureDocument2 pagesSHINERAY X30L EV BrochureShah SNHNo ratings yet
- ICCT Response To Consultation On National EV Strategy - VFDocument14 pagesICCT Response To Consultation On National EV Strategy - VFThe International Council on Clean TransportationNo ratings yet
- Acid Base and SaltDocument13 pagesAcid Base and SaltrrNo ratings yet
- Zoe Brochure MayDocument18 pagesZoe Brochure MayJean AlvesNo ratings yet
- All New Peugeot 2008Document17 pagesAll New Peugeot 2008anggayudistira2No ratings yet
- 2019 BMW Group SVR 2018 Englisch PDFDocument126 pages2019 BMW Group SVR 2018 Englisch PDFMukul SuhalkaNo ratings yet
- Defender P400 HSEDocument23 pagesDefender P400 HSEMohsinrehmanNo ratings yet
- Zoe Ze50Document48 pagesZoe Ze50gregory3No ratings yet
- Close-Coupled Petrol Particulate Filter: Design and FunctionDocument28 pagesClose-Coupled Petrol Particulate Filter: Design and FunctionAntónio FernandesNo ratings yet
- Regenerative Braking SystemDocument8 pagesRegenerative Braking Systemsanjay sureshNo ratings yet
- Futuretransp 01 00033 v3Document24 pagesFuturetransp 01 00033 v3Reinaldo RamírezNo ratings yet
- 2020 BMW Group SVR 2019 EnglischDocument142 pages2020 BMW Group SVR 2019 EnglischMuse ManiaNo ratings yet
- Jaguar XF SedanDocument21 pagesJaguar XF SedanHussein RamjaneNo ratings yet
- BMW M2 Competition F87 Competition - Pdf.asset.1578048792158Document15 pagesBMW M2 Competition F87 Competition - Pdf.asset.1578048792158Indra Fardhani ArifinNo ratings yet
- Renault ZOEDocument48 pagesRenault ZOEandangparsanNo ratings yet
- Renault KANGOO: 8th March 2021Document36 pagesRenault KANGOO: 8th March 2021Paul Ciobanu0% (1)
- Myferrari - Ferrari Portofino M - EXgTFAkDocument11 pagesMyferrari - Ferrari Portofino M - EXgTFAkJABER ALSABAHNo ratings yet
- v1 - Cars Models Pricelist KL1 NA 02 2023Document40 pagesv1 - Cars Models Pricelist KL1 NA 02 2023NigelNo ratings yet
- Countryman MINI F60 One-Pager - November 2020Document1 pageCountryman MINI F60 One-Pager - November 2020Nguyễn ChâuNo ratings yet
- 2023 Peugeot 508 R83 BrochureDocument49 pages2023 Peugeot 508 R83 BrochureHarvey BoldNo ratings yet
- Regulation of Air PollutionDocument156 pagesRegulation of Air PollutionKevin RamanNo ratings yet