You might also like
- Virtual Inertia ControlDocument13 pagesVirtual Inertia ControlSM FerdousNo ratings yet
- CuckooDocument12 pagesCuckooMohamed SobhyNo ratings yet
- Major Project Base PaperDocument6 pagesMajor Project Base PaperShiva GaneshNo ratings yet
- Model Predictive Control Using Artificial Neural Network For Power ConvertersDocument10 pagesModel Predictive Control Using Artificial Neural Network For Power ConvertersDick CarlNo ratings yet
- Coordinated Operation of Concentrating Solar Power Plant and Wind Farm For Frequency RegulationDocument9 pagesCoordinated Operation of Concentrating Solar Power Plant and Wind Farm For Frequency RegulationBright MelbaNo ratings yet
- State Feedback Controller Design For CPT SystemDocument7 pagesState Feedback Controller Design For CPT SystemAhmed Moh'dNo ratings yet
- Deep Learning MPC Controls Resonant Power ConvertersDocument9 pagesDeep Learning MPC Controls Resonant Power ConvertersSupriya DiwanNo ratings yet
- Iet-Rpg 2015 0041Document10 pagesIet-Rpg 2015 0041tabendaaarzuNo ratings yet
- Recent Philosophies of Automatic Generation Control Strategies in Power SystemsDocument12 pagesRecent Philosophies of Automatic Generation Control Strategies in Power SystemsAnmol SharmaNo ratings yet
- Improved Particle Swarm Optimization Based Load Frequency Control in A Single Area Power SystemDocument4 pagesImproved Particle Swarm Optimization Based Load Frequency Control in A Single Area Power SystemMekonnen ShewaregaNo ratings yet
- Proportional-Resonant Current Controllers Design Based On Desired Transient PerformanceDocument5 pagesProportional-Resonant Current Controllers Design Based On Desired Transient PerformanceBook4AllNo ratings yet
- Control Energy Consumption and System Performance in Vect 2014 IFAC ProceediDocument6 pagesControl Energy Consumption and System Performance in Vect 2014 IFAC ProceediNguyễn Văn TrungNo ratings yet
- Power Stage Design of Fourth-Order DC-DC Converters by Means of Principal Components AnalysisDocument11 pagesPower Stage Design of Fourth-Order DC-DC Converters by Means of Principal Components AnalysiskamiyabNo ratings yet
- Ultra-Low Power Solar Energy Harvester For Iot Edge Node DevicesDocument4 pagesUltra-Low Power Solar Energy Harvester For Iot Edge Node DevicesCristina GallardoNo ratings yet
- Adaptive MPC Current Control-4Document8 pagesAdaptive MPC Current Control-4sainadh saiNo ratings yet
- Limitations of IrptDocument10 pagesLimitations of IrptManoj BadoniNo ratings yet
- 10 1016@j Isatra 2020 05 015 PDFDocument16 pages10 1016@j Isatra 2020 05 015 PDFFarid KhouchaNo ratings yet
- Zhang Et Al - 2016 - Model Predictive Control and Direct Power Control For PWM Rectifiers WithDocument10 pagesZhang Et Al - 2016 - Model Predictive Control and Direct Power Control For PWM Rectifiers WithKaziiLaggounNo ratings yet
- SubmittedDocument14 pagesSubmittedamina bu bakerNo ratings yet
- The Low Cost Voltage and Current Measurement Device Design For Power ConvertersDocument7 pagesThe Low Cost Voltage and Current Measurement Device Design For Power ConvertersΧρηστος ΠεχλιβανηςNo ratings yet
- 9460-Article Text PDF-25260-2-10-20170215Document12 pages9460-Article Text PDF-25260-2-10-20170215cvkcvkNo ratings yet
- Model Predictive Direct Power Control with Fixed Switching Frequency and Reduced ComputationDocument11 pagesModel Predictive Direct Power Control with Fixed Switching Frequency and Reduced ComputationKaziiLaggounNo ratings yet
- National Power & Energy Conference Proceedings Optimally Allocate Embedded GeneratorsDocument7 pagesNational Power & Energy Conference Proceedings Optimally Allocate Embedded GeneratorsRenzo PastorNo ratings yet
- Comprehensive Review and Comparative Analysis of Compensation Networks For Capacitive Power Transfer SystemsDocument7 pagesComprehensive Review and Comparative Analysis of Compensation Networks For Capacitive Power Transfer SystemsAhmed Moh'dNo ratings yet
- Hysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDocument11 pagesHysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDaniel PGNo ratings yet
- Buck Boost ConverterDocument8 pagesBuck Boost ConverterJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Improving The Performance of Integrated Power-Hardware-In-The-Loop and Quasi-Static Time-Series SimulationsDocument11 pagesImproving The Performance of Integrated Power-Hardware-In-The-Loop and Quasi-Static Time-Series Simulationsramya sreeNo ratings yet
- khatri_IPST95Document9 pageskhatri_IPST95Aithagani MithilaNo ratings yet
- Journal-1 (Literature Survey)Document19 pagesJournal-1 (Literature Survey)AjinkyaA.Wankhede100% (1)
- Vijaya Gopal 2017Document9 pagesVijaya Gopal 2017Nassima BekhouchaNo ratings yet
- Applying Synchronous Condenser For Damping Provision in Converter-Dominated Power SystemDocument10 pagesApplying Synchronous Condenser For Damping Provision in Converter-Dominated Power SystemAndré LuizNo ratings yet
- Reactive Power Management in Renewable Rich Power Grids: A Review of Grid-Codes, Renewable Generators, Support Devices, Control Strategies and Optimization AlgorithmsDocument32 pagesReactive Power Management in Renewable Rich Power Grids: A Review of Grid-Codes, Renewable Generators, Support Devices, Control Strategies and Optimization AlgorithmscuntNo ratings yet
- Hybrid Power Quality Compensation System For Electric Railway Supplied by The Hypotenuse of A Scott TransformerDocument22 pagesHybrid Power Quality Compensation System For Electric Railway Supplied by The Hypotenuse of A Scott Transformernuriktoop777No ratings yet
- Optimal Location and Sizing of DSTATCOM Using Immune AlgorithmDocument11 pagesOptimal Location and Sizing of DSTATCOM Using Immune Algorithmعبد الحق جريويNo ratings yet
- A Finite Control Set Model Predictive Control Scheme For Single-Phase Grid-Connected Inverters 2020Document17 pagesA Finite Control Set Model Predictive Control Scheme For Single-Phase Grid-Connected Inverters 2020farhaniNo ratings yet
- Controlled Switching of Series CompensatedDocument11 pagesControlled Switching of Series CompensatedSultan Al-SaiariNo ratings yet
- Scgm15 MPDCC LCLDocument12 pagesScgm15 MPDCC LCLkhang nguyenthanhNo ratings yet
- Congestion Management of IEEE 30 Bus System Using Thyristor Controlled Series CompensatorDocument5 pagesCongestion Management of IEEE 30 Bus System Using Thyristor Controlled Series Compensatoryafei maNo ratings yet
- 3 Vol 3Document9 pages3 Vol 3emnt2007100% (2)
- Impact of Loads On Power Flow in Power Systems Using Powerapps and EtapDocument4 pagesImpact of Loads On Power Flow in Power Systems Using Powerapps and EtapAmirNo ratings yet
- Uni®ed Power Ow Controller (UPFC) Model in The Framework of Interior Point Based Active and Reactive OPF ProcedureDocument7 pagesUni®ed Power Ow Controller (UPFC) Model in The Framework of Interior Point Based Active and Reactive OPF ProcedureChaibHabibNo ratings yet
- Zhang2016 2Document17 pagesZhang2016 2Nassima BekhouchaNo ratings yet
- 16 - 42221 IJAER IEEEnewadjustedok96 100 - 2Document6 pages16 - 42221 IJAER IEEEnewadjustedok96 100 - 2DP Technical ClassesNo ratings yet
- DSP-Based Probabilistic Fuzzy Neural Network Control For Li-Ion Battery ChargerDocument13 pagesDSP-Based Probabilistic Fuzzy Neural Network Control For Li-Ion Battery ChargerElroy FransiskusNo ratings yet
- Paper 3Document6 pagesPaper 3Aadit JeyasankarNo ratings yet
- Predictive Control Strategy For DFIG Wind Turbines With Maximum Power Point Tracking Using Multilevel ConvertersDocument6 pagesPredictive Control Strategy For DFIG Wind Turbines With Maximum Power Point Tracking Using Multilevel ConvertersM Teresa LópezNo ratings yet
- 1902.09964Document13 pages1902.09964Sujit KumarNo ratings yet
- Modelling and Passivity Analysis of VSC Output Impedance Under SRF and Control FramesDocument6 pagesModelling and Passivity Analysis of VSC Output Impedance Under SRF and Control FramesEletricaNo ratings yet
- Real-Time Digital Compensation of Current Transformers Over A Wide Frequency RangeDocument8 pagesReal-Time Digital Compensation of Current Transformers Over A Wide Frequency RangeAlberto MedeirosNo ratings yet
- Mathematical Modelling of Engineering Problems: Received: 11 February 2019 Accepted: 3 June 2019Document9 pagesMathematical Modelling of Engineering Problems: Received: 11 February 2019 Accepted: 3 June 2019Shiv TripathiNo ratings yet
- Inductive Power Transmission System For Electric Car Charging Phase: Modeling Plus Frequency AnalysisDocument11 pagesInductive Power Transmission System For Electric Car Charging Phase: Modeling Plus Frequency AnalysisMylavarapu SriprithamNo ratings yet
- Coordinated Voltage and Reactive Power Control Strategy With Distributed Generator For Improving The Operational EfficiencyDocument8 pagesCoordinated Voltage and Reactive Power Control Strategy With Distributed Generator For Improving The Operational EfficiencyRaphael NgenyiNo ratings yet
- Grid Connection Quasi Z-Source Inverter Based On Model Predictive Control With Less Sensors CountDocument7 pagesGrid Connection Quasi Z-Source Inverter Based On Model Predictive Control With Less Sensors CountckrimyouNo ratings yet
- Direct Power Control of An AFE Using Predictive ControlDocument8 pagesDirect Power Control of An AFE Using Predictive Controlknighthood4allNo ratings yet
- Hybrid Power Quality Compensation System For Electric Railway Supplied by The Hypotenuse of A Scott TransformerDocument12 pagesHybrid Power Quality Compensation System For Electric Railway Supplied by The Hypotenuse of A Scott Transformernuriktoop777No ratings yet
- Albu, M., Nechifor, A., & Creanga, D. (2010). Smart storage for active distribution networks estimation and measurement solutions. 2010 IEEE Instrumentation & Measurement Technology Conference Proceedings.Document6 pagesAlbu, M., Nechifor, A., & Creanga, D. (2010). Smart storage for active distribution networks estimation and measurement solutions. 2010 IEEE Instrumentation & Measurement Technology Conference Proceedings.martinmunozbaNo ratings yet
- Sandro Corsi 1Document10 pagesSandro Corsi 1baades abakhNo ratings yet
- FACTS Controllers Function in An AC Transmission System: Series and Combined Multiterminal ControllersDocument3 pagesFACTS Controllers Function in An AC Transmission System: Series and Combined Multiterminal ControllersChandra Prakash JainNo ratings yet
- Ac/Dc/Ac: Control SystemDocument6 pagesAc/Dc/Ac: Control SystemFrancisco JimenezNo ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
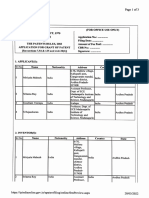
- Patent Application for a Power Management SystemDocument3 pagesPatent Application for a Power Management SystemProjects MNo ratings yet
- NOMA Based Cooperative Relaying Strategy For Underwater Acoustic Sensor Networks Under Imperfect SIC and Imperfect CSI: A Comprehensive AnalysisDocument16 pagesNOMA Based Cooperative Relaying Strategy For Underwater Acoustic Sensor Networks Under Imperfect SIC and Imperfect CSI: A Comprehensive AnalysisProjects MNo ratings yet
- Distributed Federated Learning For Ultra-Reliable Low-Latency Vehicular CommunicationsDocument14 pagesDistributed Federated Learning For Ultra-Reliable Low-Latency Vehicular CommunicationsProjects MNo ratings yet
- Deep Learning Based Simultaneous Wireless Information and Power Transfer Enabled Massive MIMO NOMA For Beyond 5GDocument6 pagesDeep Learning Based Simultaneous Wireless Information and Power Transfer Enabled Massive MIMO NOMA For Beyond 5GProjects MNo ratings yet
- Cognet: Cognitive Super Resolution Network For Persistent End-To-End Mobility Communication in Mimo SystemsDocument4 pagesCognet: Cognitive Super Resolution Network For Persistent End-To-End Mobility Communication in Mimo SystemsProjects MNo ratings yet
- An Exploration About Frameworks Based On Green Internet of ThingsDocument5 pagesAn Exploration About Frameworks Based On Green Internet of ThingsProjects MNo ratings yet
- ABB - SFC - Reference - E.ON Datteln - 20171130Document4 pagesABB - SFC - Reference - E.ON Datteln - 20171130Daniel JoseNo ratings yet
- Subdivision D.E. ReportDocument26 pagesSubdivision D.E. ReportMehul KulkarniNo ratings yet
- Simulation model of PMSG for grid studiesDocument6 pagesSimulation model of PMSG for grid studiesRupesh Arun KumarNo ratings yet
- lm00614 Onboard DC Grid Brochure - June2014 - 1 PDFDocument8 pageslm00614 Onboard DC Grid Brochure - June2014 - 1 PDFStefanitaNo ratings yet
- Low Frequency of Diesel Generator SetDocument4 pagesLow Frequency of Diesel Generator SetMagoroku D. YudhoNo ratings yet
- CO2 Baseline For Indian Power SectorDocument33 pagesCO2 Baseline For Indian Power SectorPrashantNo ratings yet
- Report on Seminar Submitted by Akshata on MicrogridsDocument12 pagesReport on Seminar Submitted by Akshata on MicrogridsNitin Kakad73% (11)
- 6013 GCS-CONTROLS enDocument5 pages6013 GCS-CONTROLS enMuhammad SyaqirinNo ratings yet
- 5 Application of Phasor Measurement Unit in Smart GridDocument6 pages5 Application of Phasor Measurement Unit in Smart Gridsiksac123No ratings yet
- An Analysis of Previous Blackouts in The World Lessons For Chinas Power IndustryDocument13 pagesAn Analysis of Previous Blackouts in The World Lessons For Chinas Power Industrymega oktavianiNo ratings yet
- Switching by Imtiaz AshrafDocument5 pagesSwitching by Imtiaz AshraffazalNo ratings yet
- New Ieee 2030TM Standard Establishes Globally Relevant Smart Grid Interoperability Reference Model and Knowledge BaseDocument4 pagesNew Ieee 2030TM Standard Establishes Globally Relevant Smart Grid Interoperability Reference Model and Knowledge BaseRajan MurugeshNo ratings yet
- Critical Infrastructure for Mining OperationsDocument12 pagesCritical Infrastructure for Mining OperationsHugh Green0% (1)
- A Novel Method of Frequency Regulation in MicrogridDocument11 pagesA Novel Method of Frequency Regulation in MicrogridAayesha AhmedNo ratings yet
- Brochure Menasol2014Document10 pagesBrochure Menasol2014jaiprakashgupta1947No ratings yet
- Control of A DC Microgrid: Marko GulinDocument6 pagesControl of A DC Microgrid: Marko GulintabendaaarzuNo ratings yet
- Modeling and Planning of EV Fast Charging Station in Power GridDocument8 pagesModeling and Planning of EV Fast Charging Station in Power GridTareq AzizNo ratings yet
- CFP v5 PDFDocument1 pageCFP v5 PDFÂngelo MarcílioNo ratings yet
- Energy: Maher Azaza, Fredrik WallinDocument11 pagesEnergy: Maher Azaza, Fredrik WallinAbu Ali Al MohammedNo ratings yet
- Volume 1 Issue 5Document519 pagesVolume 1 Issue 5IJAET Journal0% (1)
- 004 Distributed Intelligent System For Self-Healing in Smart GridsDocument10 pages004 Distributed Intelligent System For Self-Healing in Smart GridsCleberton ReizNo ratings yet
- Design of Electrical System Based On Load Flow Analysis Using ETAP For IEC ProjectsDocument6 pagesDesign of Electrical System Based On Load Flow Analysis Using ETAP For IEC ProjectsAlejandro Palacios100% (1)
- Electric Vehicles Standards Charging InfDocument27 pagesElectric Vehicles Standards Charging InfPedrito OrangeNo ratings yet
- Mapping of Current Donor and International Effort in Vietnam Energy SectorDocument3 pagesMapping of Current Donor and International Effort in Vietnam Energy SectorPhạm Duy ĐạtNo ratings yet
- Compatibility Issues in Time Domain Simulations With PowerFactory and PSSEDocument33 pagesCompatibility Issues in Time Domain Simulations With PowerFactory and PSSErizky101100% (1)
- Virtual Power Plant - An Overview - ScienceDirect TopicsDocument13 pagesVirtual Power Plant - An Overview - ScienceDirect TopicsZouaoua SlimaneNo ratings yet
- ABB SR HV ProductsDocument52 pagesABB SR HV ProductsnathanrmiddletonNo ratings yet
- China Sichuan Province Se'Ergu Hydro Power Project PDD 20080821Document50 pagesChina Sichuan Province Se'Ergu Hydro Power Project PDD 20080821akhilkuwarNo ratings yet
- Topsun Energy Pvt. LTD.: Project Completion Report OnDocument36 pagesTopsun Energy Pvt. LTD.: Project Completion Report OnSujan KoiralaNo ratings yet
- SOLAR INVERTER/CHARGER GUIDEDocument16 pagesSOLAR INVERTER/CHARGER GUIDEArslan Awan50% (2)