You might also like
- Operation Manual: Drawworks Control SystemDocument49 pagesOperation Manual: Drawworks Control Systemayham0% (1)
- MANUAL DE OPERACIÓN Y MANTENIMIENTO American Block DKS-2000Document142 pagesMANUAL DE OPERACIÓN Y MANTENIMIENTO American Block DKS-2000Juan LorenzoNo ratings yet
- 806 Rig Equipment SpecificationsDocument53 pages806 Rig Equipment SpecificationsDhrubajyoti BoraNo ratings yet
- 17-006 - Washpipe - Assembly - IOM UpdatedDocument73 pages17-006 - Washpipe - Assembly - IOM UpdatedCristiTancuNo ratings yet
- 7.000 X 2.875 ASI-X w-SHEAR RELEASE BOTTOM (17.0-26.0) (26.0-32#) 603-7000-064-FDocument11 pages7.000 X 2.875 ASI-X w-SHEAR RELEASE BOTTOM (17.0-26.0) (26.0-32#) 603-7000-064-FHarry HudiniNo ratings yet
- g312 ManualDocument14 pagesg312 Manualflasher_for_nokiaNo ratings yet
- Manual TongsDocument5 pagesManual TongsAlas KHNo ratings yet
- Shock Tool Manual PDFDocument23 pagesShock Tool Manual PDFAbboud KingNo ratings yet
- Maintenance and Troubleshooting of A Bop Control SystemDocument12 pagesMaintenance and Troubleshooting of A Bop Control SystemHamid Reza BabaeiNo ratings yet
- Kerui Equipment Group Inventory ListDocument39 pagesKerui Equipment Group Inventory Listgradisco36100% (2)
- 16 BHA Tally FormatDocument2 pages16 BHA Tally FormatShraddhanand MoreNo ratings yet
- Weatherford Lamb Libya Limited - Casing Exit & Selective ReDocument75 pagesWeatherford Lamb Libya Limited - Casing Exit & Selective ReRicardo Hurtado HernándezNo ratings yet
- 9 - 5-8inx7in Retrievable Thermal Liner Hanger Packer and accesories-CCS Well Injector and Producer Steam Flooding MethodDocument6 pages9 - 5-8inx7in Retrievable Thermal Liner Hanger Packer and accesories-CCS Well Injector and Producer Steam Flooding Methodjose gregorio mata cabezaNo ratings yet
- Item 1 - Ficha Tecnica IBOP Upper Canrig 1250 ACDocument6 pagesItem 1 - Ficha Tecnica IBOP Upper Canrig 1250 ACanghelo marquezNo ratings yet
- O 1 03 01Document2 pagesO 1 03 01gplese0No ratings yet
- 3000 HP RigDocument1 page3000 HP RigPrakash SekarNo ratings yet
- U. S. Steel Tubular Products OCTG Catalog PDFDocument238 pagesU. S. Steel Tubular Products OCTG Catalog PDFJennyNo ratings yet
- Service Manual: Model SeriesDocument68 pagesService Manual: Model SeriesJosé Joaquim Braga BragaNo ratings yet
- Workover Daily Report WQ1-039Document3 pagesWorkover Daily Report WQ1-039kareem100% (1)
- Kahraman C-181 (ST-1)Document3 pagesKahraman C-181 (ST-1)Islam AtifNo ratings yet
- Operations Summary Report Drilling Pandereta 8Document33 pagesOperations Summary Report Drilling Pandereta 8Jhon SolanoNo ratings yet
- Goldenman Petroluem Equipment Co., Limited: Quotation ListDocument4 pagesGoldenman Petroluem Equipment Co., Limited: Quotation ListEstuardo AlvaradoNo ratings yet
- Wellsharp Definitions Reference DocumentDocument15 pagesWellsharp Definitions Reference DocumentBarbare RenNo ratings yet
- C - Wellbore Cleaning Technology - H03280-BR PDFDocument26 pagesC - Wellbore Cleaning Technology - H03280-BR PDFAlexandru AndreiNo ratings yet
- Drilling BHA - General AssemblyDocument3 pagesDrilling BHA - General AssemblyAdel Ahmed AlkhaligyNo ratings yet
- 250P Series Core BarrelDocument4 pages250P Series Core BarrelJuan Miguel RobledoNo ratings yet
- Bem-650-Shale - Shaker PDFDocument8 pagesBem-650-Shale - Shaker PDFWilliamNo ratings yet
- Logan Taper Taps Catch Stuck ToolsDocument2 pagesLogan Taper Taps Catch Stuck ToolsrezaNo ratings yet
- Psi Max2000 MudgunsDocument12 pagesPsi Max2000 MudgunsBernardo PadillaNo ratings yet
- Westco Tubing Spider Slipse Model CHDDocument28 pagesWestco Tubing Spider Slipse Model CHDNaser JawadNo ratings yet
- Precision "Heavy Duty" Pressure Gauges: Trade Catalogue 2005Document38 pagesPrecision "Heavy Duty" Pressure Gauges: Trade Catalogue 2005marcosNo ratings yet
- Bushings and InsertsDocument1 pageBushings and InsertsViệt Đức ĐỗNo ratings yet
- Drilling Fluid ProgramDocument434 pagesDrilling Fluid ProgramhakoubNo ratings yet
- Gardner Denver PZ-11revF3Document66 pagesGardner Denver PZ-11revF3Luciano GarridoNo ratings yet
- Bits & Core HeadsDocument74 pagesBits & Core HeadsdaveNo ratings yet
- SB Darron Non-Magnetic Drill Collar CatalogDocument51 pagesSB Darron Non-Magnetic Drill Collar CatalogSiva GanaNo ratings yet
- Caja de Cambio John DeereDocument52 pagesCaja de Cambio John Deerenelson.oyanadel21No ratings yet
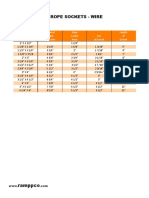
- Rope Socket DimensionsDocument1 pageRope Socket DimensionsmeryNo ratings yet
- Pob January 2017Document339 pagesPob January 2017Makhzanul FahmiNo ratings yet
- Synthetic-Based Mud Report No.10: Ongc 20-Feb-22Document4 pagesSynthetic-Based Mud Report No.10: Ongc 20-Feb-22ongcchemist gd chitraNo ratings yet
- Halliburton DDDD DDDD DDDDDocument23 pagesHalliburton DDDD DDDD DDDDlimberg_maytaNo ratings yet
- Hi Kal Catalogue New OptDocument16 pagesHi Kal Catalogue New Optask101No ratings yet
- Vertical Development Well Mud ReportDocument12 pagesVertical Development Well Mud ReportBOUBAKER LOGBINo ratings yet
- Daily Drilling Report: The Gold DiggersDocument3 pagesDaily Drilling Report: The Gold DiggerscodigocarnetNo ratings yet
- Surface Operations: SectionDocument94 pagesSurface Operations: SectionAmbroise RICHARDNo ratings yet
- Farr KT7585Document132 pagesFarr KT7585wfcenda2603No ratings yet
- He-E10 Well MontageDocument1 pageHe-E10 Well MontageSaeid OrangiNo ratings yet
- Synthetic-Based Mud Report No. 39: LLOG ExplorationDocument1 pageSynthetic-Based Mud Report No. 39: LLOG Explorationadvantage025No ratings yet
- Caterpillar Drilling Rig Repower Brochure PDFDocument10 pagesCaterpillar Drilling Rig Repower Brochure PDFAhmed EzzeddineNo ratings yet
- ATLAS COPCO Bolting CatalogueDocument128 pagesATLAS COPCO Bolting Catalogue임학진No ratings yet
- ADM III Rig Safety Report 28-03-2018Document1 pageADM III Rig Safety Report 28-03-2018Mahmoud Ahmed Ali AbdelrazikNo ratings yet
- Hydraulic Tubing Tong ManualDocument80 pagesHydraulic Tubing Tong ManualTaller cncNo ratings yet
- Electronic PanelDocument1 pageElectronic PanelMahmoud ElgabryNo ratings yet
- Oilfield Union Color Code GuideDocument5 pagesOilfield Union Color Code Guidelalberto96No ratings yet
- Pages From PS 21 NOVDocument1 pagePages From PS 21 NOVHanyNo ratings yet
- Berkeley Ownwes ManualDocument28 pagesBerkeley Ownwes ManualMoses Alvarado100% (1)
- Cameron Type U BOPDocument3 pagesCameron Type U BOPPablo David SaabNo ratings yet
- 05 02 18 Saturn Specifications 5.8Document1 page05 02 18 Saturn Specifications 5.8Jose FavaNo ratings yet
- RSP-1000 Maintenance Guide for Low Torque Plug ValvesDocument13 pagesRSP-1000 Maintenance Guide for Low Torque Plug ValvesAnonymous 45Ile4No ratings yet
- 6649884555.1.6650306571 en-US MT431B - MT436B Stage II - Operation PDFDocument112 pages6649884555.1.6650306571 en-US MT431B - MT436B Stage II - Operation PDFeduamaNo ratings yet
- Manual Oil India LTD Truck PDFDocument421 pagesManual Oil India LTD Truck PDFJuan Mejia OspinaNo ratings yet
- 900KW Rectifier Module ManualDocument34 pages900KW Rectifier Module ManualJohn SimancaNo ratings yet
- VFD House Electrical Equipment Operation ManualDocument21 pagesVFD House Electrical Equipment Operation ManualJohn SimancaNo ratings yet
- BL4S100 User ManualDocument144 pagesBL4S100 User ManualJohn SimancaNo ratings yet
- BXK56 Series of Explosion-Proof Combined Controlling Unit DirectionDocument4 pagesBXK56 Series of Explosion-Proof Combined Controlling Unit DirectionJohn SimancaNo ratings yet
- ZJ40DBST Drilling Rig Standardized Power Supply and Distribution System at Well Site Operation MaDocument15 pagesZJ40DBST Drilling Rig Standardized Power Supply and Distribution System at Well Site Operation MaJohn SimancaNo ratings yet
- NYT ZJ40DBST Drilling Rig Communication System Operation ManualDocument28 pagesNYT ZJ40DBST Drilling Rig Communication System Operation ManualJohn SimancaNo ratings yet
- DW Trailer of ZJ40DBST Drilling Rig User ManualDocument23 pagesDW Trailer of ZJ40DBST Drilling Rig User ManualJohn SimancaNo ratings yet
- CATALOGODocument26 pagesCATALOGOJohn SimancaNo ratings yet
- ACS800 Multi DriveDocument149 pagesACS800 Multi DriveJohn SimancaNo ratings yet
- SPF 3000TL LVM Datasheet 24P 48PDocument1 pageSPF 3000TL LVM Datasheet 24P 48PJohn SimancaNo ratings yet
- ACS 600 Installation and Start-Up GuideNBRA-6XX Braking ChoppersDocument56 pagesACS 600 Installation and Start-Up GuideNBRA-6XX Braking ChoppersJohn SimancaNo ratings yet
- User'S Manual: Zj40Dbst Drilling RigDocument48 pagesUser'S Manual: Zj40Dbst Drilling RigJohn Simanca100% (1)
- DJY Series Insulation Monitor Applicable For Insulation Monitoring of Any Current Below Than 1800Document15 pagesDJY Series Insulation Monitor Applicable For Insulation Monitoring of Any Current Below Than 1800John SimancaNo ratings yet
- Rotary Table Maintenance GuideDocument2 pagesRotary Table Maintenance GuideJohn SimancaNo ratings yet
- ACS 800-01 (0.55 To 110kW) U1 (0.75 To 150HP) Drives Hardware ManualDocument124 pagesACS 800-01 (0.55 To 110kW) U1 (0.75 To 150HP) Drives Hardware ManualJohn SimancaNo ratings yet
- 1.7 Miscellaneous ProceduresDocument3 pages1.7 Miscellaneous ProceduresJohn SimancaNo ratings yet
- 3.1 Operation of Rotary TableDocument1 page3.1 Operation of Rotary TableJohn SimancaNo ratings yet
- RT Drive Device Parts ListDocument3 pagesRT Drive Device Parts ListJohn SimancaNo ratings yet
- Drawings & Replacemnt PartsDocument11 pagesDrawings & Replacemnt PartsJohn Jairo Simanca CastilloNo ratings yet
- Rotary Table Lubrication System ExplainedDocument2 pagesRotary Table Lubrication System ExplainedJohn SimancaNo ratings yet
- Circulating Manifold of Drilling Fluid User ManualDocument16 pagesCirculating Manifold of Drilling Fluid User ManualJohn SimancaNo ratings yet
- HTB12 AC Drilling Motor User ManualDocument15 pagesHTB12 AC Drilling Motor User ManualJohn SimancaNo ratings yet
- RT Drive Device User ManualDocument13 pagesRT Drive Device User ManualJohn SimancaNo ratings yet
- HHF-1600 Direct-Drive Pump Utilization Parts ListDocument27 pagesHHF-1600 Direct-Drive Pump Utilization Parts ListJohn Simanca100% (1)
- ABB Drives Rtac-01 Pulse Encoder Interface Module User's ManualDocument23 pagesABB Drives Rtac-01 Pulse Encoder Interface Module User's ManualJohn SimancaNo ratings yet
- Common Sense of Tyres User ManualDocument9 pagesCommon Sense of Tyres User ManualJohn SimancaNo ratings yet
- Electrical Wireline Spooler User ManualDocument14 pagesElectrical Wireline Spooler User ManualJohn SimancaNo ratings yet
- Electrical Wireline Spooler Parts ListDocument10 pagesElectrical Wireline Spooler Parts ListJohn SimancaNo ratings yet
- Generator Design StepsDocument40 pagesGenerator Design StepsrajfabNo ratings yet
- BrewZilla How To Service and Clean PumpDocument10 pagesBrewZilla How To Service and Clean PumpjbNo ratings yet
- DNV CG 0131Document25 pagesDNV CG 0131Cheok CHNo ratings yet
- Husky Engineering SpecsDocument89 pagesHusky Engineering Specsntrkulja@hotmail.comNo ratings yet
- Trajectory Planning For Robot ManipulatorsDocument61 pagesTrajectory Planning For Robot ManipulatorsJasón De EleaNo ratings yet
- Chul Park Viscous Shock Layer Calculation of Stagnation-Region Heating Environment Viscous Shock Layer Calculation of Stagnation-Region Heating EnvironmentDocument7 pagesChul Park Viscous Shock Layer Calculation of Stagnation-Region Heating Environment Viscous Shock Layer Calculation of Stagnation-Region Heating EnvironmentlazharNo ratings yet
- High-Rise PrecastDocument7 pagesHigh-Rise PrecastAshu JainNo ratings yet
- Performance BMW - November 2015Document108 pagesPerformance BMW - November 2015adonxNo ratings yet
- E532396 01E BVNG Basic FPPDocument310 pagesE532396 01E BVNG Basic FPPWilliam PeeleNo ratings yet
- CondenserDocument44 pagesCondenserNeil John CatapangNo ratings yet
- 6.1 - Extra Problems For Isolated Foundations To BS8110Document14 pages6.1 - Extra Problems For Isolated Foundations To BS8110Ahmed Al-AmriNo ratings yet
- Continuous Distillation Diagram ProcessDocument1 pageContinuous Distillation Diagram ProcessSebastianNo ratings yet
- Preparing For Aluminum GTAW: Proper Equipment Setup and Workplace Preparation Reduce DefectsDocument5 pagesPreparing For Aluminum GTAW: Proper Equipment Setup and Workplace Preparation Reduce DefectsRaron1No ratings yet
- Ryco Hose CatalogueDocument84 pagesRyco Hose CatalogueVenk KisaragiNo ratings yet
- Lec6 - Residual PropertiesDocument4 pagesLec6 - Residual PropertiesKaryl CoronelNo ratings yet
- 2007 Kawasaki KLX200S Service ManualDocument131 pages2007 Kawasaki KLX200S Service ManualcaesarjdNo ratings yet
- Maintenance Autoclave ScheduleDocument2 pagesMaintenance Autoclave Scheduleamanuel waleluNo ratings yet
- Electrohydraulic Control SystemDocument8 pagesElectrohydraulic Control SystemSagar Kumar100% (1)
- Injection Pump Test Specifications 093000-677#Document3 pagesInjection Pump Test Specifications 093000-677#Pedro Abellan100% (1)
- Single Phase Diagram - Real Gases - 003Document36 pagesSingle Phase Diagram - Real Gases - 003JatskinesisNo ratings yet
- Chapter 5Document55 pagesChapter 5Arjun Kumar100% (1)
- Modeling The Life Cycle Cost of Jet Engine MaintenanceDocument105 pagesModeling The Life Cycle Cost of Jet Engine Maintenanceralf_seemann100% (3)
- Motorcycle Suspension SetupDocument8 pagesMotorcycle Suspension SetupemiNo ratings yet
- Spontaneous Process, Entropy, and Free EnergyDocument37 pagesSpontaneous Process, Entropy, and Free EnergyRaven LampaNo ratings yet
- McConkey 5 PBDocument7 pagesMcConkey 5 PBHussain AbbasNo ratings yet
- Cswip 3.2 Q&aDocument3 pagesCswip 3.2 Q&aMoses_Jakkala100% (3)
- KREISEL General ENDocument57 pagesKREISEL General ENDucSyHoNo ratings yet
- Steel Bridge Cantilever ErectionDocument7 pagesSteel Bridge Cantilever Erectionzieq72100% (1)
- W211 Compressor (Turbo) Removal Install PDFDocument2 pagesW211 Compressor (Turbo) Removal Install PDFTiago SantosNo ratings yet
- Mattress and Seat Systems Service Manual: SER0005 Issue 2 January 2005Document62 pagesMattress and Seat Systems Service Manual: SER0005 Issue 2 January 2005iman RahimiNo ratings yet