You might also like
- WD615 - 2012Document84 pagesWD615 - 2012hungNo ratings yet
- Modrol MF4 MS4Document91 pagesModrol MF4 MS4Jackam kamNo ratings yet
- WP2 3D41E201型中英文技术规格书Document13 pagesWP2 3D41E201型中英文技术规格书Franyusmid Gomez Bolivar100% (1)
- ZF 6WG200箱Document75 pagesZF 6WG200箱Дмитрий Коржов100% (3)
- 6BTAA5 9-G2+快速手册Document85 pages6BTAA5 9-G2+快速手册Zhou Li100% (1)
- tilting構造簡報Document119 pagestilting構造簡報靖楓100% (5)
- Weichai Euro IIIDocument132 pagesWeichai Euro IIImarcelosheldonnNo ratings yet
- Update Setting FardriverDocument1 pageUpdate Setting FardriverDiky HermawanNo ratings yet
- Parameter SettingDocument2 pagesParameter SettingDiky HermawanNo ratings yet
- Datasheet nd72530Document2 pagesDatasheet nd72530Diky HermawanNo ratings yet
- Stamford AUTOMATIC VOLTAGE Manual (AVRDocument4 pagesStamford AUTOMATIC VOLTAGE Manual (AVRDanial AbdullahNo ratings yet
- 1243 Curtis Controller ChineseDocument15 pages1243 Curtis Controller ChineseВиталий ЧерновNo ratings yet
- EC发动机控制系统 101 116Document16 pagesEC发动机控制系统 101 116Nguyễn Trường SơnNo ratings yet
- HBS86HDocument8 pagesHBS86HRudy TorrezNo ratings yet
- MAM900G3柴油移机机控制器V1 1Document18 pagesMAM900G3柴油移机机控制器V1 1giapy0000No ratings yet
- EMCPII电子模块控制屏Document72 pagesEMCPII电子模块控制屏TTIBCCANo ratings yet
- 大力汽修学院 大众通道号和系统登录密码Document124 pages大力汽修学院 大众通道号和系统登录密码张连杉No ratings yet
- STZ直行程调节型Document9 pagesSTZ直行程调节型wei zhouNo ratings yet
- 06 X系列发动机电控原理Document77 pages06 X系列发动机电控原理jackNo ratings yet
- VVVF Basic KnowledgeDocument46 pagesVVVF Basic KnowledgeSzeto Wa kwanNo ratings yet
- 深圳市爱智控电机有限公司样册AZKPDFDocument63 pages深圳市爱智控电机有限公司样册AZKPDFanhthong3kNo ratings yet
- HW SM003DUL V2 SkyWalker 20150512Document2 pagesHW SM003DUL V2 SkyWalker 20150512jannoNo ratings yet
- DMS-055A说明书v1 0Document28 pagesDMS-055A说明书v1 0許駿瑋No ratings yet
- S 6291 CN - 2 PDFDocument4 pagesS 6291 CN - 2 PDFmnezamiNo ratings yet
- 大力汽修培训 奇瑞本田数据流分析Document70 pages大力汽修培训 奇瑞本田数据流分析张连杉No ratings yet
- 4BTA3.9-G2 快速手册Document80 pages4BTA3.9-G2 快速手册Miguel SanchezNo ratings yet
- 日野P11C共轨原理Document59 pages日野P11C共轨原理jackNo ratings yet
- MD02三相双轴步进细分驱动器电流及步距角设置说明Document2 pagesMD02三相双轴步进细分驱动器电流及步距角设置说明Flavio SanchezNo ratings yet
- 馬達特性與選用Document40 pages馬達特性與選用Brian HuangNo ratings yet
- MT-01 ManualDocument13 pagesMT-01 Manualpan RoyNo ratings yet
- HBS57Document8 pagesHBS57Thế NhânNo ratings yet
- 9E燃气轮机一次调频分析Document3 pages9E燃气轮机一次调频分析Maman ArosiNo ratings yet
- Ver: SG168V08CDocument2 pagesVer: SG168V08C謝玉順No ratings yet
- 变频器从基础到精通Document21 pages变频器从基础到精通chuncheng0016No ratings yet
- 28071Document97 pages28071labrosse.maintenanceNo ratings yet
- 115 230DR10AL 01 ChinoDocument20 pages115 230DR10AL 01 ChinoAngel RosasNo ratings yet
- 大众奥迪标准数据流Document149 pages大众奥迪标准数据流Gary FisherNo ratings yet
- CM360充电器使用说明Document8 pagesCM360充电器使用说明TTIBCCANo ratings yet
- 6BT5.9-G2 快速手册Document87 pages6BT5.9-G2 快速手册Miguel SanchezNo ratings yet
- 发动机 2Document1 page发动机 2大明哥No ratings yet
- C30EV出租版-维修-电动机系统 A02-C30EV PDFDocument80 pagesC30EV出租版-维修-电动机系统 A02-C30EV PDFPhang KumwingNo ratings yet
- C30EV出租版-维修-电动机系统 A02-C30EV PDFDocument80 pagesC30EV出租版-维修-电动机系统 A02-C30EV PDFPhang KumwingNo ratings yet
- 1683257092-34010098 A03Document12 pages1683257092-34010098 A03li58872024No ratings yet
- YCT MotorDocument4 pagesYCT MotorGear motorsNo ratings yet
- 320B监控器控制系统Document8 pages320B监控器控制系统chunping songNo ratings yet
- CDCE3 C3控制器说明书2023 6 5Document16 pagesCDCE3 C3控制器说明书2023 6 5selangsheNo ratings yet
- PDAN標準型DMDocument4 pagesPDAN標準型DMDương Văn HòaNo ratings yet
- J5伺服系统Document67 pagesJ5伺服系统alwinzhuangNo ratings yet
- ABB变频器ACS800参数1Document6 pagesABB变频器ACS800参数1HayLenLeeNo ratings yet
- DNSMDocument6 pagesDNSMTTIBCCANo ratings yet
- WP2 3D47E201型中英文技术规格书Document13 pagesWP2 3D47E201型中英文技术规格书Franyusmid Gomez BolivarNo ratings yet
- GU3303/GU3304发电机组控制器使用说明 PDFDocument42 pagesGU3303/GU3304发电机组控制器使用说明 PDFArc HieNo ratings yet
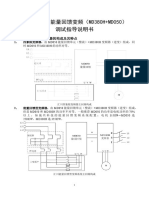
- 660V防爆能量回馈变频 (MD050 250+MD380H 355) 调试指导说明书Document11 pages660V防爆能量回馈变频 (MD050 250+MD380H 355) 调试指导说明书jiangang wuNo ratings yet
- FC6A210 250故障码列表Document4 pagesFC6A210 250故障码列表Adriano SantanaNo ratings yet
- AC 2牵引说明书Document45 pagesAC 2牵引说明书huanghanghuanNo ratings yet
- CN Ti Stepper MotorsDocument10 pagesCN Ti Stepper MotorsJohnNo ratings yet
- Multicharger 750 12V/40A 24V/20A 36V/15A: Voigt&Haeffner保留所有版权及抵制不正当竞争的合法权利。未经书面同意,本产品说明书及操作指南不得复印,也不得向第三人透露。Document34 pagesMulticharger 750 12V/40A 24V/20A 36V/15A: Voigt&Haeffner保留所有版权及抵制不正当竞争的合法权利。未经书面同意,本产品说明书及操作指南不得复印,也不得向第三人透露。Pablo BarbozaNo ratings yet
- 20181128-RM6S (跨頁) -送印Document6 pages20181128-RM6S (跨頁) -送印Abdul HaqueNo ratings yet
- SY310挖掘机电气控制系统培训教材Document48 pagesSY310挖掘机电气控制系统培训教材lliu yunNo ratings yet