You might also like
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2From EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2No ratings yet
- Chapter 10 - Three Phase TransformerDocument30 pagesChapter 10 - Three Phase TransformerWarez Ali0% (1)
- AC Machines (Alternators) PDFDocument17 pagesAC Machines (Alternators) PDFbenny bull33% (3)
- A.C. Circiuits NotesDocument38 pagesA.C. Circiuits NotesbenjadiditNo ratings yet
- TransformersDocument75 pagesTransformersRama KrishnaNo ratings yet
- Modern Electrical Installation for Craft StudentsFrom EverandModern Electrical Installation for Craft StudentsRating: 4.5 out of 5 stars4.5/5 (4)
- Disha Publication Electrical Concept Notes With Exercies Electrical MachinesDocument64 pagesDisha Publication Electrical Concept Notes With Exercies Electrical MachinesRal Meena100% (1)
- Terex RT 100 PDFDocument22 pagesTerex RT 100 PDFRAFA SOTONo ratings yet
- Introduction To Fluids in MotionDocument3 pagesIntroduction To Fluids in MotionEditor IJRITCCNo ratings yet
- AC GeneratorsDocument12 pagesAC GeneratorsEiron Ross Flores100% (1)
- DCM BasicsDocument21 pagesDCM BasicsPraveen YadavNo ratings yet
- Power Factor Meter: ConstructionDocument7 pagesPower Factor Meter: Constructionsahale sheraNo ratings yet
- Transformer TestsDocument5 pagesTransformer TestsBerentoNo ratings yet
- Exp # 07 Study of Poly-Phase Circuits Using Multisim Electronics WorkbenchDocument13 pagesExp # 07 Study of Poly-Phase Circuits Using Multisim Electronics WorkbenchIrfan HaiderNo ratings yet
- Lecture 2 - Single Phase TransformersDocument60 pagesLecture 2 - Single Phase Transformersasiri201912No ratings yet
- BasicDocument60 pagesBasicrohan bhatiNo ratings yet
- Aust/Eee: Ahsanullah University of Science and TechnologyDocument52 pagesAust/Eee: Ahsanullah University of Science and Technologyruhul aminNo ratings yet
- DC Machine ConstructionDocument6 pagesDC Machine ConstructionIRVIN MORANGINo ratings yet
- E) EA 0.01-0.05 V: Semicnductor Lattice, and Hence of HolesDocument10 pagesE) EA 0.01-0.05 V: Semicnductor Lattice, and Hence of HolesDebrup GhoshNo ratings yet
- (L4) - (JLD 3.0) - AC - 11th August.Document62 pages(L4) - (JLD 3.0) - AC - 11th August.Ajit TripathyNo ratings yet
- 19 Electronic-Devices-and-Communication-SystemsDocument26 pages19 Electronic-Devices-and-Communication-SystemsDebayanbasu.juNo ratings yet
- 2013 Revision Document Electric CircuitsDocument11 pages2013 Revision Document Electric Circuitsrowan chibiNo ratings yet
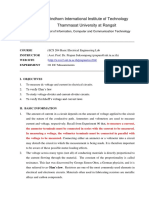
- Sirindhorn International Institute of Technology Thammasat University at RangsitDocument13 pagesSirindhorn International Institute of Technology Thammasat University at Rangsitقويه TasmanNo ratings yet
- Improving The Power Factor of An Electrical Installation: What You Have To RememberDocument16 pagesImproving The Power Factor of An Electrical Installation: What You Have To Rememberserge RinaudoNo ratings yet
- Compound GenratorDocument8 pagesCompound GenratorKunjilal meenaNo ratings yet
- PoEC 8 Circuit Theorems and ConversionsDocument50 pagesPoEC 8 Circuit Theorems and Conversionsmohammad alajarmeh100% (1)
- Chapter3-Single Phase ACDocument58 pagesChapter3-Single Phase ACBrian LiNo ratings yet
- 1.overview of Electronic ComponentsDocument13 pages1.overview of Electronic ComponentsArpita 18No ratings yet
- Electromagnetic InductionDocument57 pagesElectromagnetic Inductionhamza alqadasiNo ratings yet
- Transformer BasicDocument56 pagesTransformer BasicakhilNo ratings yet
- 1.6 Real Single-Phase Transformer.: DT D eDocument37 pages1.6 Real Single-Phase Transformer.: DT D eRamez MezNo ratings yet
- Basic Transformer NightttDocument30 pagesBasic Transformer NightttBekuretsion TsegayeNo ratings yet
- Self-Lift DC-DC Converters: M Ail IlDocument6 pagesSelf-Lift DC-DC Converters: M Ail IlStudents Xerox ChidambaramNo ratings yet
- Chapter11 - Electricity WorkshopDocument12 pagesChapter11 - Electricity Workshopazyad8246No ratings yet
- By Anshuman Shukla October 27th, 2007Document27 pagesBy Anshuman Shukla October 27th, 2007ShikhaNeeraj AggarwalNo ratings yet
- Transformer: Single-Phase Two Winding TransformerDocument8 pagesTransformer: Single-Phase Two Winding Transformerksg9731No ratings yet
- (L5) - (JLD 3.0) - AC - 12th August.Document63 pages(L5) - (JLD 3.0) - AC - 12th August.Ajit TripathyNo ratings yet
- Capacitors: Kit Building Class Lesson 2Document14 pagesCapacitors: Kit Building Class Lesson 2gpramesh75No ratings yet
- Class 2 - Active & Passive ElementsDocument25 pagesClass 2 - Active & Passive ElementsSwayam Tejas PadhyNo ratings yet
- 03a. Alternating Current (128-153)Document27 pages03a. Alternating Current (128-153)Mupli RajeshNo ratings yet
- Alternating CurrentDocument24 pagesAlternating CurrentAnand KNo ratings yet
- Idealized Operation of The Class E Tuned Power AmplifierDocument11 pagesIdealized Operation of The Class E Tuned Power AmplifiersmarziehNo ratings yet
- Ac TheoryDocument61 pagesAc Theorytk techboyNo ratings yet
- Bee MiniDocument16 pagesBee MiniDhruv GholapNo ratings yet
- Cap 4 Moshi ChengDocument59 pagesCap 4 Moshi ChengAnonymous Lp4tvCf0HNo ratings yet
- Current Electricity CH3 Part 2Document12 pagesCurrent Electricity CH3 Part 2Rishab SharmaNo ratings yet
- Transformer Handbook Electrical Engineering XYZ - CDocument12 pagesTransformer Handbook Electrical Engineering XYZ - Cyogendra.utlNo ratings yet
- Rojas 02-12-2023 20.08Document17 pagesRojas 02-12-2023 20.08Juphil PletoNo ratings yet
- Ee 11Document17 pagesEe 11Juphil PletoNo ratings yet
- Section 2: Power System Mathematics and Physics, Three-Phase, Power FactorDocument65 pagesSection 2: Power System Mathematics and Physics, Three-Phase, Power FactorKhuram TabassomNo ratings yet
- Utkarsh Physics Ac Project 2.0OOODocument20 pagesUtkarsh Physics Ac Project 2.0OOOT VpNo ratings yet
- 20.8.2020 Class-1Document21 pages20.8.2020 Class-1abhi shekNo ratings yet
- EEE305 All TermDocument37 pagesEEE305 All Termসামিন জাওয়াদNo ratings yet
- Physics Dept at Ghs S.2 Introduction To Electricity Part Ii Notes 2020Document9 pagesPhysics Dept at Ghs S.2 Introduction To Electricity Part Ii Notes 2020Dahanyakage WickramathungaNo ratings yet
- Electrical Technology Lab: Dronacharya College of Engineering Khentawas, Gurgaon - 123506Document46 pagesElectrical Technology Lab: Dronacharya College of Engineering Khentawas, Gurgaon - 123506Shreyansh RajNo ratings yet
- Physics 2 Electric: Direct Current CircuitsDocument27 pagesPhysics 2 Electric: Direct Current CircuitsSamat SeyidovNo ratings yet
- Electrical Technology 08082016Document46 pagesElectrical Technology 08082016AkNo ratings yet
- 1transformer VkmehtaDocument5 pages1transformer VkmehtadtrhNo ratings yet
- Transformers - Chapter 2 - NewDocument58 pagesTransformers - Chapter 2 - NewAhmet MehmetNo ratings yet
- Series Circuits-IDocument35 pagesSeries Circuits-INatalia khanNo ratings yet
- (2002) ShibuyaDocument6 pages(2002) ShibuyaAntônio Kaminski JúniorNo ratings yet
- Transformers: Mochammad Ariyanto, ST, MTDocument84 pagesTransformers: Mochammad Ariyanto, ST, MTAmran WiratmaNo ratings yet
- Ac Machine MotorDocument10 pagesAc Machine MotorPatoriku KunNo ratings yet
- Ac Machine MotorDocument10 pagesAc Machine MotorPatoriku KunNo ratings yet
- Bsee4a - Ee117 Compiled QuestionsDocument31 pagesBsee4a - Ee117 Compiled QuestionsPatoriku KunNo ratings yet
- Windmill PlantDocument10 pagesWindmill PlantPatoriku KunNo ratings yet
- Steam Power PlantDocument6 pagesSteam Power PlantPatoriku KunNo ratings yet
- Solar Steam PlantDocument10 pagesSolar Steam PlantPatoriku KunNo ratings yet
- Basics of Pressure MeasurementDocument4 pagesBasics of Pressure MeasurementPatoriku KunNo ratings yet
- Application o FeedbackDocument4 pagesApplication o FeedbackPatoriku KunNo ratings yet
- Iso 679 2009Document12 pagesIso 679 2009HanifNo ratings yet
- QuizDocument1 pageQuizXiao ZenNo ratings yet
- Sinopec Tulux Series - GELDocument17 pagesSinopec Tulux Series - GELSumaya AkterNo ratings yet
- Pump & Motor Catalog: Aluminum Bushing SeriesDocument116 pagesPump & Motor Catalog: Aluminum Bushing SeriesMario SouzaNo ratings yet
- Uk - Datasheets - 18032010vsmall FileDocument60 pagesUk - Datasheets - 18032010vsmall FileEka Jayalaksana0% (1)
- Stepped Columns - A Simplified Design MethodDocument23 pagesStepped Columns - A Simplified Design MethodwrayroNo ratings yet
- 04 NAC Initial Transverse Stability (160213)Document21 pages04 NAC Initial Transverse Stability (160213)Gilles MathieuNo ratings yet
- Hydraulic System: 5.1 Location of Main Hydraulic ComponentsDocument53 pagesHydraulic System: 5.1 Location of Main Hydraulic ComponentsMinh TânNo ratings yet
- Product Recommendation Hyundai County County D4AF (2004 and After)Document3 pagesProduct Recommendation Hyundai County County D4AF (2004 and After)Jose CachipatoNo ratings yet
- LSL Beam and HeaderDocument36 pagesLSL Beam and HeadersteveNo ratings yet
- Nota RobotDocument26 pagesNota RobotpnroslindaNo ratings yet
- Transport Phenomena PaperDocument4 pagesTransport Phenomena Paperbhaskar5377100% (1)
- Perkins Engine 1006TG2A SERIES SPARE PARTSDocument2 pagesPerkins Engine 1006TG2A SERIES SPARE PARTSIbrahim YunusNo ratings yet
- Compressed Air: Stäubli Invents Active SafetyDocument12 pagesCompressed Air: Stäubli Invents Active SafetyAlper SakalsizNo ratings yet
- T Bolt Specs PDFDocument2 pagesT Bolt Specs PDFrefaeNo ratings yet
- Range Rover Manual Service ToolsDocument10 pagesRange Rover Manual Service ToolsLouise RogersNo ratings yet
- Algas SDI ZIMMER Brochure InternationalDocument4 pagesAlgas SDI ZIMMER Brochure InternationalTECKNIPETROL 001No ratings yet
- Direct Inj L9707 Nissan PatrolDocument36 pagesDirect Inj L9707 Nissan PatrolRouba YounesNo ratings yet
- Eileen IntroductionDocument43 pagesEileen IntroductionYork ZengNo ratings yet
- Grade XI - Phys. T2 Ans KeyDocument7 pagesGrade XI - Phys. T2 Ans Keyrohan fernandesNo ratings yet
- 72 Olympique (Owners Manual)Document40 pages72 Olympique (Owners Manual)JacobnMarie LaaksoNo ratings yet
- PHD Thesis Optimization of Bow Shape For Large, Slow Ships by NordåsDocument84 pagesPHD Thesis Optimization of Bow Shape For Large, Slow Ships by NordåsPrasad PatilNo ratings yet
- Thermodynamic Analysis of Rajby Industries Power and Boiler HouseDocument20 pagesThermodynamic Analysis of Rajby Industries Power and Boiler HouseSyed AhmedNo ratings yet
- Dynamic Depressurisation Calculations LNG Regasification UnitDocument15 pagesDynamic Depressurisation Calculations LNG Regasification Unitilmu2No ratings yet
- JC Gasket CranfoilDocument2 pagesJC Gasket CranfoilMachineryengNo ratings yet
- 1 EquipmentDocument2 pages1 EquipmentJay RanjanNo ratings yet
- Ans To IS 800 LSM CodeDocument11 pagesAns To IS 800 LSM Codeanon_854101020% (1)
- 2 Steel Used in BridgesDocument2 pages2 Steel Used in BridgesJay PatelNo ratings yet