You might also like
- Lab 8Document7 pagesLab 8Sulu YntymakovaNo ratings yet
- Electric of Sauer CompressorsDocument4 pagesElectric of Sauer Compressorshao100% (1)
- 3638 Exercice Verin FlowcodeDocument7 pages3638 Exercice Verin FlowcodeSaid AhnicheNo ratings yet
- Input Area of SideDocument4 pagesInput Area of Sidejackielou trongcosoNo ratings yet
- Computer ProgrammingDocument6 pagesComputer ProgrammingSHIVAM DASNo ratings yet
- Appendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1Document3 pagesAppendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1gonzalesNo ratings yet
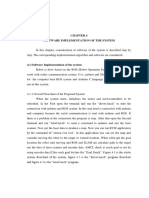
- Software Implementation of The SystemDocument8 pagesSoftware Implementation of The SystemMoniNo ratings yet
- Chapter 1Document7 pagesChapter 1Ty MenghouNo ratings yet
- Diw SiteDocument11 pagesDiw SiteshripalNo ratings yet
- Algorithm Design: by DR Goh Wan InnDocument25 pagesAlgorithm Design: by DR Goh Wan InnSky FireNo ratings yet
- SCinTE 2015 Poster TELIKODocument1 pageSCinTE 2015 Poster TELIKOFpat PaterNo ratings yet
- CLA Epic: User GuideDocument20 pagesCLA Epic: User GuidejulianbreNo ratings yet
- Awsn Lab 06 - Temp and Light SensorDocument17 pagesAwsn Lab 06 - Temp and Light SensorAllam Naveen Kumar 21MCE0006No ratings yet
- Introduction of Programming and Flow Chart 01Document5 pagesIntroduction of Programming and Flow Chart 01Vipin KumarNo ratings yet
- PowerDocument2 pagesPowergiaitich1No ratings yet
- 9500 Keyboard Commands and Return StringsDocument24 pages9500 Keyboard Commands and Return StringsJosé Luis SassoNo ratings yet
- Introduction To Flowcharting: Starting Out With C++, 4th EditionDocument27 pagesIntroduction To Flowcharting: Starting Out With C++, 4th EditionWINDY HIDAYATNo ratings yet
- 53300-903-04 ContadorDocument6 pages53300-903-04 Contadorfrancisco.rengelNo ratings yet
- Experiment 7Document9 pagesExperiment 7abstudio0049No ratings yet
- DIN-rail Programmable Transducers: Applications FeaturesDocument4 pagesDIN-rail Programmable Transducers: Applications FeaturesRAHAT KHANNo ratings yet
- C LanguageDocument82 pagesC LanguageSarvan KumarNo ratings yet
- General Timing Chart / General Circuit Diagram: Imagepress C7000 Series Imagepress C7000VpDocument90 pagesGeneral Timing Chart / General Circuit Diagram: Imagepress C7000 Series Imagepress C7000VpRichard ZavalaNo ratings yet
- Problems Solving Techniques For Class 10 StudentsDocument5 pagesProblems Solving Techniques For Class 10 StudentsEngr Syed YahyaNo ratings yet
- FlowchartDocument6 pagesFlowchartkanchan guptaNo ratings yet
- Reactive Power Controller: Brief Instructions See Last PageDocument56 pagesReactive Power Controller: Brief Instructions See Last PageMajid Raja ChauhanNo ratings yet
- Developed By: Malek Mohammedzuber P. Shah Dhaval RDocument22 pagesDeveloped By: Malek Mohammedzuber P. Shah Dhaval RSunil PillaiNo ratings yet
- Notes 7.1 Graphing Exponential Functions PDFDocument11 pagesNotes 7.1 Graphing Exponential Functions PDFElias JonesNo ratings yet
- Lecture 2Document35 pagesLecture 2Shehab YasserNo ratings yet
- WPEVStart Run WiresDocument1 pageWPEVStart Run Wiresyared abebeNo ratings yet
- Cat TM82 8300manual PDFDocument2 pagesCat TM82 8300manual PDFbuddhika MadusankaNo ratings yet
- PS2 ProtocolDocument73 pagesPS2 Protocolapi-3721578100% (1)
- Casio CA-53W Watch ManualDocument2 pagesCasio CA-53W Watch ManualMERTAL JAYA ABADINo ratings yet
- CS RecordDocument97 pagesCS RecordsharmikbkNo ratings yet
- Comancheria FlowchartsDocument6 pagesComancheria FlowchartssmijatovNo ratings yet
- L07-09 - Decision MakingDocument69 pagesL07-09 - Decision MakingMohammad Anisur RahamanNo ratings yet
- MicroKraft enDocument2 pagesMicroKraft enanisincool9901No ratings yet
- Exercise 9Document3 pagesExercise 9陳冠言 CHEN,KUAN-YEN H54084010No ratings yet
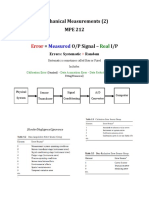
- Mechanical Measurements - 2Document14 pagesMechanical Measurements - 2فضائح لا تصدقNo ratings yet
- Symbol Library Submenu Description Block Parameters DescriptionDocument2 pagesSymbol Library Submenu Description Block Parameters DescriptionSani1248No ratings yet
- Current vs. Future State Flowchart: Wi-Fi Mode Activated? Initialize Pins, Variables and LibrariesDocument1 pageCurrent vs. Future State Flowchart: Wi-Fi Mode Activated? Initialize Pins, Variables and LibrariesBruNo ratings yet
- Week : For For If End End End End FunctionDocument7 pagesWeek : For For If End End End End FunctionTasia Bueno De MesquitaNo ratings yet
- Features of FADOS ProductDocument1 pageFeatures of FADOS ProductUsman SajidNo ratings yet
- Assembly LanguageDocument29 pagesAssembly Languagemritunjay bihari singhNo ratings yet
- Endro SubkoDocument14 pagesEndro Subkoapi-3800536No ratings yet
- Microprocessor Controlled Ac and DC DrivesDocument27 pagesMicroprocessor Controlled Ac and DC DrivesnarayanNo ratings yet
- Flowchart Excerise Answers 2Document41 pagesFlowchart Excerise Answers 2Bina YasirNo ratings yet
- Electronics & Instrumentation-Module-02Document32 pagesElectronics & Instrumentation-Module-02GURURAJ GOURNo ratings yet
- Bump AroundDocument3 pagesBump AroundlabstudentNo ratings yet
- The Project in Few Words: A PIC16F84 Based CW DecoderDocument5 pagesThe Project in Few Words: A PIC16F84 Based CW Decoderfox7878No ratings yet
- Inter-Process Communication: Dr. Talal Ashraf Butt Talal - Ashraf@aue - AeDocument27 pagesInter-Process Communication: Dr. Talal Ashraf Butt Talal - Ashraf@aue - AeKhadijah almousaNo ratings yet
- COM455 Lab 8 Amplitude Modulation Part 3 Winter 2022Document5 pagesCOM455 Lab 8 Amplitude Modulation Part 3 Winter 2022HarpratapNo ratings yet
- Diatonic Harmonic Quantiser: Harmonàig User ManualDocument40 pagesDiatonic Harmonic Quantiser: Harmonàig User ManualscribidisshitNo ratings yet
- Unit 2Document7 pagesUnit 2kishorghatage89No ratings yet
- TNC 370Document333 pagesTNC 370Олександр СапаровNo ratings yet
- Flow Charts, Algorithm, Pseudo CodeDocument54 pagesFlow Charts, Algorithm, Pseudo CodeNeeraj JoshiNo ratings yet
- Aiet MPDocument64 pagesAiet MPkmpshastryNo ratings yet
- 505 Program Mode Worksheet For 15 M.W Turbine: Turbine Start - : Speed Setpoint ValuesDocument6 pages505 Program Mode Worksheet For 15 M.W Turbine: Turbine Start - : Speed Setpoint Valueschoudhary_kumar20No ratings yet
- Lecture 35Document8 pagesLecture 35skdanso1No ratings yet
- Gamma Correction: Enhancing Visual Clarity in Computer Vision: The Gamma Correction TechniqueFrom EverandGamma Correction: Enhancing Visual Clarity in Computer Vision: The Gamma Correction TechniqueNo ratings yet
- Encryption and DecryptionDocument38 pagesEncryption and DecryptionZerox OnesNo ratings yet
- Design of Active Filters (LPF, HPF) : Aim: ApparatusDocument5 pagesDesign of Active Filters (LPF, HPF) : Aim: ApparatusSindhu VelayudhamNo ratings yet
- Car Rental DocumentationDocument35 pagesCar Rental DocumentationÊvîl ÂttïtùðeNo ratings yet
- HCSA-Sales-Transmission & Access V2.0 Training MaterialDocument90 pagesHCSA-Sales-Transmission & Access V2.0 Training MaterialHadi SleemNo ratings yet
- Introduction of P2P SystemsDocument24 pagesIntroduction of P2P SystemsRokhan NasseryNo ratings yet
- Introduction To Networks - Module Practice and QuizDocument9 pagesIntroduction To Networks - Module Practice and Quizbeth pelaez ariasNo ratings yet
- TLE4997E2: Programmable Linear Hall SensorDocument34 pagesTLE4997E2: Programmable Linear Hall SensortanmaysutariaNo ratings yet
- FAQs - Touch ID - Quick BalanceDocument3 pagesFAQs - Touch ID - Quick BalanceAnonpcNo ratings yet
- Dit 0302 Web Design and Development IDocument2 pagesDit 0302 Web Design and Development IMichael SasiNo ratings yet
- Hovard Access CardDocument3 pagesHovard Access CardBoy MangaturNo ratings yet
- AltaafDocument25 pagesAltaafzaky chanNo ratings yet
- Rhel 8 Mock Paper IDocument5 pagesRhel 8 Mock Paper Idhc14301No ratings yet
- Com - Fundamentals QuizDocument3 pagesCom - Fundamentals QuizRogelyn MangampoNo ratings yet
- How To Configure NMaxDocument3 pagesHow To Configure NMaxKenneth T. Guillermo0% (1)
- Lab 09 Handout Universal Shift RegisterDocument4 pagesLab 09 Handout Universal Shift RegisterMuhammad SaudNo ratings yet
- IT304 Lab2 Analysis of HTTP Using WiresharkDocument5 pagesIT304 Lab2 Analysis of HTTP Using WiresharkLAKSHYA SINGHNo ratings yet
- CN - Lab - Manual-21cs52 FormatDocument27 pagesCN - Lab - Manual-21cs52 Formattejashreebs.iseNo ratings yet
- HackerRank Zig Zag Sequence Problem SolutionDocument4 pagesHackerRank Zig Zag Sequence Problem SolutionSanjitha BalasundaramNo ratings yet
- Huawei OceanStor Dorado 8000 and 18000 All-Flash Storage Systems Data Sheet (For Read)Document8 pagesHuawei OceanStor Dorado 8000 and 18000 All-Flash Storage Systems Data Sheet (For Read)Fatih AvtepeNo ratings yet
- StarterNotebook - Jupyter NotebookDocument12 pagesStarterNotebook - Jupyter NotebookTosin GeorgeNo ratings yet
- FL - PatcherDocument2 pagesFL - PatcherJusAnothaSoulOnNotez64No ratings yet
- Comp 203 AssignmentDocument4 pagesComp 203 AssignmentKenboyz 100No ratings yet
- Hypermesh ChecklistDocument2 pagesHypermesh Checklistvdmoorthy123No ratings yet
- db2z 12 InstbookDocument1,024 pagesdb2z 12 Instbookamir ghorbaniNo ratings yet
- Log Cat 1688262745051Document67 pagesLog Cat 1688262745051nathaniaNo ratings yet
- BSBMGT407 Student Assessment Booklet CB V2.0 (Restricted)Document41 pagesBSBMGT407 Student Assessment Booklet CB V2.0 (Restricted)Jenny YipNo ratings yet
- Cybercrime NotesDocument18 pagesCybercrime Notesandrea garciaNo ratings yet
- Computer Hardware Servicing NC II Module Part 1 ReviewerDocument1 pageComputer Hardware Servicing NC II Module Part 1 ReviewerJerry Halibas100% (1)
- Ch1 3 PDFDocument32 pagesCh1 3 PDFmartiniro marsNo ratings yet
- Alcatel Omnipcx Enterprise: Ls/Gs Trunk GroupDocument12 pagesAlcatel Omnipcx Enterprise: Ls/Gs Trunk GroupAriel BecerraNo ratings yet