Professional Documents
Culture Documents
Записка 35-3-1 (Максимів)
Записка 35-3-1 (Максимів)
Uploaded by
robotnitskiy03Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Записка 35-3-1 (Максимів)
Записка 35-3-1 (Максимів)
Uploaded by
robotnitskiy03Copyright:
Available Formats
ВСТУП
ТЕОРІЯ МЕХАНІЗМІВ І МАШИН – наука, що вивчає загальні методи
структурного і динамічного аналізу і синтезу механізмів, механіку машин.
Методи, що викладаються в курсі ТММ, придатні для проектування будь-якого
механізму і не залежать від його технічного призначення, а також фізичної
природи робочого процесу машин.
Курс ТММ є вступним в спеціальність майбутнього інженера і має інженерну
направленість.
КУРСОВЕ ПРОЕКТУВАННЯ З ТММ сприяє закріпленню, заглибленню і
узагальненню теоретичних знань, застосуванню їх до комплексного рішення
конкретної задачі по дослідженню і розрахунку механізмів і машин.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 6
1. ПРИЗНАЧЕННЯ МЕХАНІЗМУ, ЩО ПРОЕКТУЄТЬСЯ
ПРЕС – машина, що призначена для обробки металів тиском, яка
здійснює своїми робочими частинами не ударну (статичну) дію на матеріал,
що оброблюється. Обробці на пресі підлягають різноманітні матеріали з метою
змінювання форми, наприклад, у пресах для кування, штампування та пресування
у кувально-пресовому виробництві; укрупнення кускових і порошкоподібних
матеріалів при брикетування; для зменшення об'єму рихлих речовин, наприклад,
при пакетування металевої стружки; для випробування матеріалів і т. ін.
Обтиснення предмета, що оброблюється, здійснюється між рухомою та
нерухомою частинами преса. Остання – це, зазвичай, частина нерухомої основи –
станини. Рухома робоча частина ( повзун, траверса, рухома поперечка) при
роботі здійснює зворотно-поступальний рух. Частина прямого ходу, під час якого
здійснюється обробка, називається робочим ходом. Решта прямого ходу та увесь
зворотній хід називається холостим ходом.
За кінематикою розрізняють гідравлічні та механічні преси. Останні діляться
на кривошипні, гвинтові, колінні, рейкові, важільні.
За конструкцією розрізняють преси з вертикальним, похилим або
горизонтальним рухом повзуна, з одним або кількома повзунами.
У даному завданні прес – механічний, кривошипний, з вертикальним рухом
повзуна.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 7
2. ПРИНЦИП ДІЇ МЕХАНІЗМУ, ЩО ПРОЕКТУЄТЬСЯ
Прес, що проектується, є механічним, кривошипним, тобто зворотно-
поступальний рух повзуна (пуансона) здійснюється за допомогою кривошипно-
повзунного механізму (у даному завданні – 5-ти ланкового).
Обертання кривошипу надається від асинхронного трифазного електродвигуна
через двоступінчасту зубчасту передачу, де першим ступенем є планетарний
редуктор, у даному завданні -3-го типу.
Механізм видалення готових виробів приводиться до руху кулачком, який
закріплено на приводному валі кривошипа.
При проектуванні преса установка кулачка передбачена таким чином, щоб
механізм видалення починав працювати після закінчення робочого ходу
основного механізму. В даному завданні кулачковий механізм - з обертовим
кулачком і поступально рухомим роликовим штовхачем.
Шарнірно-важільний механізм складається з кривошипа ОА, шатуна АВ та
повзуна В. Шосте колесо служить кривошипом ШВМ. Крім кривошипу 6 в склад
ШВМ входять шатуни 2 і 4, коромисло 3 і повзун 5. На осі кривошипу
закріплений кулачок, від якого рух передається на штовхач. Кулачок
встановлюється таким чином, щоб штовхач рухався при зворотному русі повзуна.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 8
3. ДИНАМІЧНИЙ АНАЛІЗ І СИНТЕЗ ШАРНІРНО-ВАЖІЛЬНОГО
МЕХАНІЗМУ
3.1 Задачі
Для заданого основного механізму за його кінематичною схемою, масовим
характеристикам ланок, відомим діючим силам визначити закон руху початкової
ланки при усталеному русі і момент інерції маховика, що утримує періодичні
коливання швидкості початкової ланки в межах, які визначаються заданим
коефіцієнтом нерівномірності руху.
3.2 Кінематичний синтез шарнірно-важільного механізму
3.2.1. Накреслимо ескіз кінематичної схеми шарнірно-важільного механізму,
керуючись бланком завдання на курсову роботу (рис.3.1).
3.2.2. Встановимо по даним для проектування (бланк завдань) вхідні і вихідні
параметри синтезу.
В нашому завданні вхідними параметрами синтезу є:
– максимальна відстань між крайніми положеннями повзуна Н D 450 мм ;
– частота обертання n 30 об / хв ;
O2 B
– відношення довжин 1.6
O2C
CD
– відношення довжин 0.5 ;
O2C
x
– відношення довжин 0.95 ;
O2C
y
– відношення довжин 1.8 ;
O2C
AS 2
– відношення довжин 0.4 ;
AB
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 9
Знайдемо довжини ланок за наступними формулами:
O2C H D 1.6 450 1.6 720 мм;
O2 B O2C 0.6 720 0.6 432 мм;
x O2C 0.95 720 0.95 684 мм;
y O2C 0.95 720 1.8 1296 мм;
AS2 AB 0.4 1296 0.4 544.012 мм;
O1B0 AB O1 A
O1B0 AB O1 A
'
Звідси
O1B0' O1B0 11489 1231
O1 A 128.645 мм.
2 2
Довжини всіх відстаней зводимо в табл. 3.1.
Довжина ланки АВ:
O1B0' O1 A 1489 128.645 1360 мм
Таблиця 3.1.Результати кінематичного синтезу ШВМ
Відстань l1 = O1A l2 = АВ l3 = О2С l4 =СD
Довжина, мм 129 1360 720 360
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 10
C0
C1
C11
B0
B1
C2 B11
C10
B2
B10 O2
C3 B3
C9 B9
B4 B8
C4
C8 D0 B5 B7
D1
B6 B'0
C5
C7 C0 '
C6
D2
D3
D4
D5
D 0 ' D6
ω1
A0,12 A11
A1 A10
A2 A9
O1
A3 A8
A4 A7
A5 A6 A0 '
Рис. 3.1. Ескіз кінематичної схеми шарнірно-важільного механізму
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 11
3.3 Структурний аналіз шарнірно-важільного механізму
3.3.1. Визначимо ступінь рухомості заданого ШВМ. Даний механізм –
плоский, значить, за формулою П.Л.Чебишева:
W = 3n – 2p5 – p4 ,
де n – кількість рухомих ланок; n = 5;
p5 – кількість кінематичних пар 5-го класу; р5 = 7;
р4 – кількість кінематичних пар 4-го класу; р4 = 0.
Звідси:
W 3 5 2 7 1
3.3.2. Побудуємо структурну схему механізму. Для зручності побудови
складемо таблицю кінематичних пар і ланок, їхніх твірних (див. табл. 3.2).
Таблиця 3.2
Ланки і кінематичні пари
I5 II5 III5 IV5 V5 VI5 VII5 ∞
0,1 1,2 2,0 2,3 2,4 4,5 5,0
3.3.3. Структурну схему будуємо в наступній послідовності:
– зображуємо стояк у вигляді трикутника (т. я. 3 точки стояка);
– зображуємо ланки, які утворюють пари зі стояком (ланки 1, 3, 5);
– зображуємо решту ланок в порядку утворення замкнених контурів. Структурна
схема зображена на рис. 3.3.
Рис. 3.3. Структурна схема ШВМ
3.3.4. Розчленуємо структурну схему ШВМ на групи Ассура.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 12
а
в
б
Рис.3.4. Початковий механізм (а), групи 2-3 (б) і 4-5 (в) другого класу 2-го
порядку
Запишемо формулу будови механізму
I (0,1) II 2 (2,3) II 2 (4,5)
Механізм 2-го класу.
3.4 Плани механізму
Будуємо кінематичну схему механізму в положеннях, що відповідають 12-ти
рівновіддаленим положенням початкової ланки механізму (кривошипа О2А).
Попередньо задаємось масштабним коефіцієнтом μl = 0,002 м/мм. Плани
положень будуються „методом засічок”, який побудований на том положенні
ТММ, що всі ланки механізму абсолютно жорсткі і не змінюють своїх розмірів.
Побудову починає з розмітки точок стояків О і С. далі знаходимо крайні
положення механізму. За початок робочого ходу приймаємо той, з якого рух
вихідної ланки (повзуна) починається проти сили корисного опору Fko . Усі точки,
що відповідають початку робочого ходу, позначаємо індексом „0”, друге крайнє –
індексом „0’”.
Розбиваємо коло точки А з положення А0 на 12 рівних частин, нумеруємо їх
в сторону обертання кривошипа (за завданням). Далі положення решти точок.
знаходимо методом засічок на своїх траєкторіях. Отримуємо 12 планів положень
механізму (див.лист МД-51.382.145.003 РР).
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 13
C0
C1
p,o1 ,o2
B0
C2
B1
B2 O2
C3 B3
B4
C4 B5
D0
D1
B6 B'0
C5 '
C0
C6
D2
a
D3
b
D4 4
D5
D0 D6
'
d c
б
ω1
A0
A1
A2
O1
A3
A4
A5 A6 A0 '
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 14
s4 c
d n3
4 a
s2 n1
π ,o1 ,o2
n2
в
Рис. 3.5. Плани положень (а), швидкостей (б) і прискорень (в) для 2-го положення
механізму
3.5 Плани швидкостей (рис. 3.5, б)
Плани швидкостей будуємо для усіх 12-ти положень механізму, починаючи
з нульового. План швидкостей будується в порядку утворення механізму за
формулою будови.
3.5.1 Початковий механізм
1. Визначаємо швидкість точки А кривошипу, м/с:
vA v0 vOA
де v0 0 , так як т.А належить стояку.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 15
м
VOA 1 lOA 3.142 0.129 0.404
с
де ω1 – кутова швидкість кривошипу, с-1;
n1 3,14159 30
1 3.142 c 1
30 30
n1 – частота обертання кривошипу, за завданням, хв-1;
lOA – довжина кривошипу, м.
2. Задаємось масштабним коефіцієнтом планів швидкостей:
V
V A1 ,
pa1
де pa1 – відрізок, що відображає вектор VA на плані;
візьмемо pa1 63мм (кратний швидкості), тоді
0.404 м с 1
V 0.0064
63 мм
Такий масштаб зручний для користування.
Виберемо полюс Р плану швидкостей. Вектор pa1 перпендикулярний до
кривошипа ОА и направлений в сторону ω. Відкладаємо його від полюса Р.
3.5.2 Група 2-3
По структурній схемі (рис. 3.3) видно, що VA1 = VА2 т. я. ланки 1 і 2 зв’язані
обертальною парою.
Швидкості VВ2 = VВ3 рівні, так як ланки 2 і 3 також зв'язані обертальною
парою.
Для знаходження швидкості т.В складаємо 2 векторних рівняння:
vB 3 v A 2 v BA
B 3 A2
vB 3 v02 vB 02 BO 2
Відомі напрямки швидкостей: VB 3 A2 ланці ВА, VBO 2 ланці ВО2.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 16
З a12 проводимо пряму,перпендикулярну ВА, а з полюса Р – пряму
перпендикулярну ВО2. На перетині отримуємо т.В. Швидкість:
vB3 pb3 v
BO2 pb
Швидкість т.С знайдемо за подібністю: 0,6
CO2 pc
pb
Звідси pc
0,6
3.5.3 Група 4-5
Відомо що vС 4 vС 3 , так як ланки 3 і 4 зв'язані обертальною парою.
vD 4 vD 5 , так як ланки 4 і 5 також зв'язані обертальною парою.
Складаємо 2 векторних рівняння для знаходження швидкості т.D:
vD 5 vC v
D 5C 4 CD
vD 5 vD vD 5 D осіХ
З точки с4, на плані швидкостей, проводимо перпендикуляр до ланки СD, а
із полюса Р – пряму, паралельну осі х. На перетині цих прямих і буде т.D.
Звідси
vD5 pd5 v
Швидкість всіх точок ланок механізму записуємо в табл. 3.3, а плани
швидкостей приведені на листі МД-51.382.145.003 РР.
Таблиця 3.3
Значення швидкостей точок механізму, м/с
0 1 2 3 4 5 6
Va 0.404 0.404 0.404 0.404 0.404 0.404 0.404
Vb 0 0.247 0.386 0.413 0.345 0.205 0.023
Vc 0 0.393 0.63 0.689 0.574 0.331 0.036
Vd 0 0.493 0.772 0.826 0.69 0.41 0.046
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 17
3.6 Плани прискорень (рис 3.5, в)
Плани прискорень будуються для 2-х заданих положень механізму:
нульового і робочого, заданого кутом φ1.
Побудова планів прискорень відбувається згідно формулі будови механізму,
починаючи з початкового механізму.
3.6.1 Початковий механізм
1. Визначаємо прискорення т. А1 кривошипа:
aA1 a01 aAk 1O1 aAn1O1 aA1O1
Прискорення a01 0 , так як т.О1 належить стояку, aA1O1 0 тому, що за
умовою кутова швидкість є величиною сталою і aAk 1O1 0 , так як прискорення
радіуса-вектора.
An1O1 12 lO1A1 3.1422 0,129 1.27м / с2
2. Задаємося значенням масштабного коефіцієнта:
n
a AO 1.27 м с 2
0.1
а 127 мм
Якщо величина aAO
n
в масштабі μа менше 1 мм, то на плані прискорень її
можна не відкладати.
Вибираємо полюс π. Прискорення a A направлено паралельно ланці O1A в
сторону О1. З полюса π проводимо відрізок довжиною 127 мм, паралельно О1A.
3.6.2 Група 2-3
Відомо, що a A 2 a A1 , так як ланки 1 і 2 зв'язані обертальною парою.
Ланки 2 і 3 також зв’язані обертальною парою, тому aB 2 aB 3 .
Для знаходження прискорення т.В складаємо 2 векторних рівняння:
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 18
a a a n a
B 2 A 2 aB 2 A 2
k
B3 A2 B 2 A2
aB 2 aB 3 aO 2 aBn 3O 2 aB 3O 2 aBk 3O 2
aBk 2 A2 0 т. я. довжина ВА – const, aBk 3O 2 0 т. я. довжина ВО2 – const.
Знаходимо aBn 2 A2 :
V 2 ab v
2
a n
BA ;
AB l
BA
l AB
Для 3-го положення:
16.86 0,0064
2
м
a n
B 2 A2 0.0085 ;
1.36 с2
Знаходимо aBn 3O 2 :
pb v ;
2 2
VBO
aBn 3O 2 2
lBO 2 BO2 l
Для 3-го положення:
64.68 0.0065
2
м
a n
B 3O 2 0.395 ;
0.432 с2
Напрямок: aBn 2 A2 паралельно ланці ВА, aBn 3O 2 паралельно ВО2.
aBn 2 A2 aBn 302
В масштабі a : an1 ; n2 .
a a
0,0085 0.395
Для 3-го: an1 0.852 мм; n2 39.486 мм.
0.1 0.1
З т.а2 проводимо пряму, паралельну ланці ВА, в напрямку від т.В до т.А,
відкладаємо відрізок an1 , ставимо т. n1 , і проводимо перпендикуляр. З полюса π
проводимо пряму ВО2, в напрямку від т.В до т. О2, відкладаємо відрізок n2 ,
ставимо т. n2 , проводимо перпендикуляр. Точка перетину цих перпендикулярів –
т.В, з’єднуємо її з полюсом.
Прискорення, м/с:
aB 2,3 ( aB 2,3 ) a 41.96 0.1 4,1 м / с2 - для 3-го положення.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 19
O2 B pb
Прискорення т.С знаходимо за подібністю: 0,6
O2C pc
b
Звідси c
0.6
41.96
c =83.92 мм – для 3-го положення.
0.6
Прискорення, м/с:
aC ( aC ) a 83.92 0.1 8.3 м / с 2 - для 3-го положення.
3.6.3 Група 4-5
Так як ланки 3 і 4 зв'язані обертальною парою, то aC 4 aC 3 .
Прискорення aD 4 aD 5 , т. я. ланки 4 і 5 також зв'язані обертальною парою
Для того щоб знайти прискорення точки D, складаємо два векторних
рівняння:
a a a n a k 0
D4 C4 D 4C 4 D 4 C 4 aD 4 C 4
aD 4 aD 5 aD aDn 5 D aD 5 D
aDk 4C 4 0 , т. я. довжина СD – const, aD 0 , т. я. точка стояка,
Знаходимо:
cd v ;
2
V2
a n
DC
CD l
D 4C 4
lCD
Для 3-го положення:
1.71 0.0064
2
м
a n
D 4C 4 0.0033 ;
0.36 с2
В масштабі:
0.0033
Для 4-го: cn3 0.033 мм.
0.1
Напрямок aDn 4C 4 паралельно ланці CD; від т.D до т.С. З т.С3,4 проводимо
пряму, паралельну CD, відкладаємо відрізок від т.D до т.С, ставимо т.n 3,
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 20
проводимо пряму, перпендикулярну осі у. На перетині перпендикулярів
отримуємо т.D.
Прискорення т.D:
aD ( aD ) a 21.85 0.1 2.2 м / с 2 - для 3-ого положення.
Плани прискорень для 2-х положень наведені на листі (МД-
51.313.341.003.РР), а значення прискорень всіх точок в табл.3.4.
Таблиця 3.4
Прискорення точок механізму, м/с2
aA aB aC aD
“3” 1.27 4.1 8.3 2.2
3.7 Сили корисних опорів
Силу FКО корисного опору визначаємо за заданим графіком FКО = FКО(S).
Цей графік перекреслюємо з бланку завдання, розмістивши його для зручності
над ходом повзуна В, на який ця сила діє.
Н
Масштаб сили приймемо рівним F 50 .
мм
Для заданого робочого положення механізму сила FКО =1400 Н.
3.8 Зведений момент сил корисних опорів
Керуючись формулою (10.14) [2], замінивши в ній передаточну функцію
відношенням відповідних відрізків з плану швидкостей, складемо вираз для
визначення зведеного моменту сил корисного опору
VD pd
M звКО FКО FКО rOA
1 pa
де рd – відрізок, що відповідає швидкості т. В;
ра – відрізок, що відповідає швидкості т. А кривошипа.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 21
Результати обчислень зведеного моменту сил корисного опору представлені
в табл. 3.5.
Таблиця 3.5.
Значення зведеного моменту сил корисного опору, Н∙м
0 1 2 3 4 5 6
FКО, Н 0 0 0 1400 1400 1400 1400
MзвКО 0 0 0 307.171 256.014 147.525 16.218
Будуємо діаграму M зв М зв (рис. 3.6, а) в функції кута повороту
КО КО
рад
кривошипу φ за отриманими значеннями, задавшись масштабами 0.035
мм
Н м
та М 3.2 .
мм
3.9 Графік робот сил корисного опору
Графік робот сил корисного опору будуємо МЕТОДОМ ГРАФІЧНОГО
ІНТЕГРУВАННЯ за кутом φ графіка M зв М зв (рис. 3.6, б). Вибираємо
КО КО
полюс інтегрування К, полюсну відстань КО = 60 мм (чим менше КО, тим
крутіший графік інтегральної кривої). На кожній ділянці розбивки 0-1, 1-2 і т.д.
площу під кривою замінюємо прямокутником рівної площі. Для цього знаходимо
на ділянках кривої такі точки, через які, провівши горизонтальні прямі,
отримуємо площі над кривою і під кривою рівні. Точки проектуємо на вісь
ординат і з’єднуємо з полюсом К. На кожній ділянці 0-1, 1-2 і т.д. наступної
координатної сітки проводимо промінь, паралельний відповідному променю.
Отримані точки з’єднуємо плавною кривою. Отримали графік роботи сил
корисного опору Aзв Aзв .
КО КО
Масштаб графіка роботи:
A M KO 3.2 0.035 60 6.72 Дж/мм
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 22
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 23
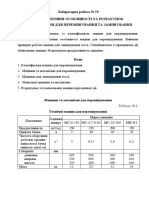
3.10 Вибір електродвигуна
Марка двигуна та його технічні дані вибираються з каталогу-довідника на
трьохфазні асинхронні електродвигуни єдиної серії 4А з короткозамкненим
ротором, загалом з [4]. ГОСТ 19523-74.
Двигун вибираємо за заданою синхронною частотою nс =1500 1/хв. та
необхідною потужністю, яка визначається за формулою:
A
КО
зв ц 12 12
,
P А
Tц Тц
де Aц – робота за цикл з графіка AзвКО AзвКО ;
Тц – час циклу, с
2 60 60
Tц 2 с
ср nОА 30
η – ККД машини,
η = ηпр ∙ ηр.м.
де ηр.м – ККД шарнірно-важільного механізму;
ηпр – ККД механізму привода.
ККД шарнірно-важільного механізму приймаємо орієнтовно для шести
ланкового механізму ηр.м = 0,85.
ККД механізму привода
ηпр = η1Н ∙ η56
z n 13 1500
i1H 5 C 26
z6 nOA 25 30
де η1Н – ККД планетарного редуктора, визначається за формулою 2.11 (3)
1 H
1H H
i1H
H 12H 23H 0,95 0,95 = 0,9025
де 12 , 23 – ККД однієї пари зубчастих коліс, для нашої схеми планетарного
H H
редуктора (2 тип): 0,95 – для 1-ї пари зовнішнього зачеплення та
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 24
1 H 1 0,9025
1H 0.9025
H
0.914
i1H 26
Остаточно η = 0,914 ∙ 0,95∙ 0,85 = 0.738
Визначаємо необхідну потужність двигуна, кВт
Pрозрах
12 12
,
A
44.18 6.72
202.85Вт 0.2 кВт
Tц 2 0.738
де μА – масштабний коефіцієнт графіка роботи сил корисного опору
P 1.2 Pрозрах 1.2 0.2 0.24кВт
Вибираємо асинхронний трифазний короткозамкнений електродвигун за
ГОСТ 19523-74 з ряду nс =1500 об/хв (за завданням):
Технічні дані електродвигуна наведені в табл. 3.6.
Таблиця 3.6.
Технічні дані електродвигуна
Потужність, Частота обертання, M пд M кд. з.
Тип двигуна д д
кВт nном, 1/хв M ном M ном
4AA63A4У3 0,25 1380 2,1 2,2
3.11 Висновки
В ході динамічного аналізу і синтезу шарнірно-важільного механізму було
побудовано кінематичну схему механізму, плани швидкостей для робочого ходу і
план прискорень для заданого положення. Також пораховано моменти від сил
корисного опру та по графіку роботи підібрано двигун.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 25
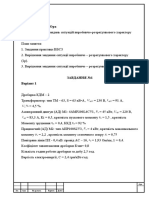
4 КІНЕТОСТАТИЧНЕ ДОСЛІДЖЕННЯ ШВМ
4.1 Завдання
Визначити реакції в кінематичних парах заданого механізму й
зрівноважуючу силу, прикладену до його початкової ланки, з урахуванням сил
інерції, за кінематичною схемою, масовим характеристикам ланок, зовнішнім
силам і відомому закону руху початкової ланки.
4.2. Плани механізму, швидкостей і прискорень
Дано плани положень, швидкостей і прискорень для двох положень:
нульового й заданого робочого.
4.3. Сили, що діють на ланки механізму
1. Сили корисних опорів визначаємо за графіком сил корисного опору для
заданого положення:
FКО FКО s
Вектор сили корисного опору Fко прикладаємо до ланки 5 проти напрямку
швидкості цієї ланки (за планом швидкостей).
2. Сили ваги ланок визначаємо таким чином.
У робочій машині кривошипом (ланка 1) служить зубчасте колесо 6 (останнє
в приводі), сила ваги якого
G1 m1 g ,
де m1 – маса зубчастого колеса 6;
m1 1,3 mв
g – прискорення вільного падіння; g 10 м/с2.
mв – маса зубчастого вінця колеса;
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 26
mв d f s 1 ,
де d f – діаметр западин, мм;
s – площа поперечного перерізу вінця колеса, мм2;
1 – густина матеріалу колеса, 7800 кг/м3.
Діаметр западин визначаємо з урахуванням виду зачеплення зубчастої пари
4-5 (за завданням – нерівнозміщене), тоді
mII z5
d f 5 2 rf 5 2( mII ha c x5 ) 150 –12 1 0,25+0.471 261.912 мм,
2
ha – коефіцієнт висоти головки зубця, ha 1,0 ;
де
c – коефіцієнт радіального зазору, c 0,25 ;
x5 – коефіцієнт зміщення ([2], табл. 5, 6) для числа зубців колеса z5 =25;
Ширину вінця колеса приймаємо в 4m 4 12 48 мм.
Тоді S 3 mII b 312 48 0,0017 м2 ,
де 3m – висота перерізу обіду, мм.
mв 3.14159 0.0017 0.261 7800 11.09 кг
- маса усього колеса з урахуванням маси спиць і ступиці:
m 1,3 mb 1,311.09 14.417 кг.
- маса шатуна 2 (АВ): m2 q l2 0.02 1360 27.201 кг
кг
де q 0.02
мм
- сила ваги ланки 3 (О2С): m3 q l3 0.02 720 14.4 кг;
- сила ваги шатуна 4 (СD): m4 q l4 0.02 360 7.2 кг;
- сила ваги повзуна 5 (D): m5 5 m4 5 7.2 36 кг.
Сила ваги колеса 6: G1 m1 g 14.417 10 144.174 Н
- сила ваги шатуна 2 (АВ): G2 m2 g 27.20110 272.006 Н
- сила ваги ланки 3 (О2С): G3 m3 g 14.4 10 144 Н
- сила ваги шатуна 4 (СD): G4 m4 g 6 7.2 72 Н
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 27
- сила ваги повзуна 5: G5 m5 g 36 10 360 Н
Вектори сил ваги прикладаються в центрах ваги ланок.
4.4. Сили інерції ланок
1. Сили інерції кривошипа не визначаємо, тому що центр мас зубчастого
колеса перебуває на осі обертання О1.
2. Визначаємо силу інерції Fi 2 й момент сил M i 2 інерції ланки 2 (AB):
Fi 2 m2 as 2 m2 s2 a 27.201 0.471 0.1 25.274H ,
де as 2 – прискорення центра мас ланки 2 (за планом прискорень):
Момент сил інерції ланки 2:
M i 2 J s 2 2 4.193 0.627 2.627 H м ,
де J s 2 – момент інерції ланки 2 (за завданням), кг·м2;
2 – кутове прискорення ланки, с-2.
Визначаємо 2 за формулою:
2
a AB
n1b а 85.24 0.1
0.627 c 2 ,
l AB BA l 1,36
де n1b – з плану прискорень;
l – масштаб плану положень, м/мм.
3. Визначаємо силу інерції Fi 3 й момент сил M i 3 інерції ланки 3 (О2С):
Fi 3 m3 as 3 m3 s3 a 14.4 41.97 0.1 6.042 H ,
де as 3 – прискорення центра мас ланки 3 (за планом прискорень):
Момент сил інерції ланки 3:
M i 3 J s 3 3 0.622 0.198 0.123 H м ,
де J s 3 – момент інерції ланки 3 (за завданням), кг·м2;
3 – кутове прискорення ланки, с-2.
Визначаємо 3 за формулою:
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 28
3
a BC
n2b а 14.23 0.1
0.198 c 2 ,
lBC О2C l 0,72
де n2b – з плану прискорень;
l – масштаб плану положень, м/мм.
4. Визначаємо силу інерції Fi 4 й момент сил M i 4 інерції ланки 4 (СD):
Fi 4 m4 as 4 m4 s4 a 7.2 46.96 0.1 3.38 H ,
де as 4 – прискорення центра мас ланки 3 (за планом прискорень):
Момент сил інерції ланки 4:
M i 4 J s 4 4 0.078 2.191 0.17 H м ,
де J s 4 – момент інерції ланки 4 (за завданням), кг·м2;
4 – кутове прискорення ланки, с-2.
Визначаємо 4 за формулою:
4
a DB
n3d а 78.89 0.1
2.191 c 2 ,
lDB СD l 0,36
де n3d – з плану прискорень;
l – масштаб плану положень, м/мм.
5. Визначаємо силу інерції ланки 5 /повзуна D/:
Є тільки сила інерції:
Fi 5 m5 as 5 m5 d a 36 21.85 0.1 7.864H ,
де a s 5 – прискорення центра мас ланки 5 as 5 aD (за планом прискорень).
4.5. Визначення реакцій у кінематичних парах
Силовий розрахунок проводиться по групах Ассура (статично визначені
системи), починаючи з останньої приєднаної групи за структурною формулою
I 0,1 II 2 2,3 II 2 4,5
Починаємо з розгляду групи 4-5.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 29
Група 4-5: (див. мал. 4.1.)
Група Ассура 4-5
µL =0,005 м/мм
C3 τ
R(2,3)4
n
R(2,3)4
ε4 s4
Mi4
Fi4
R05 G4 D3
h2 =31,91 Fi5
G5
h1 =3,59
Fk.o.
а)
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 30
Fi4
Fk.o.
G5
G4 τ
Fi5 R(2,3)4
План сил групи 4-5
H
μF =10 мм
n
R(2,3)4
R(2,3)4
R05
б)
Мал.4.1. Група 4-5 (а) і план сил групи 4-5 (б).
На групу діють наступні сили:
- сила корисного опору Fко, прикладена в т. D;
- сили ваги G4, G5, прикладені в центрах мас S4 і D;
- сила інерції Fi5, прикладена в т. D, проти напрямку прискорення т. D;
- сила інерції Fi4, прикладена в центрі мас в т. S4, направлена паралельно і
протилежно вектору прискорення s4 ;
Для даної групи невідомими є:
- величина реакції R(2,3)4 у шарнірі С;
- величина й точка дотику реакції RO5;
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 31
- величина і напрямок реакції R4,5 в шарнірі С.
Розкладемо реакцію R(2,3)4 на 2 складові:
n
R(2,3)4 R(2,3)4 R(2,3)4 ;
R234 знаходимо з рівняння суми моментів сил, що діють на ланку 4,
відносно т.С:
M D G4 h1 Fi 4 h2 M i 4 R(2,3)4 СD 0 .
Плечі h1 й h2 /BD/ беремо прямо із креслення в мм (див. аркуш МД-
51.382.145.003 РР):
Звідки:
G4 h1 Fi 4 h2 M i 4 72 3.59 3.38 31.91 0.17
R(2,3)4 5.086H .
СD 72
Складаємо загальне рівняння рівноваги групи 4-5. Для цього векторну суму
усіх сих, що діють на неї прирівнюємо до 0 (невідомі ставимо в кінці рівняння):
RO5 Fко G5 Fi 5 G4 Fi 4 R2,3 R2,3 0 ,
у відрізках:
ab bc cd de ef fg gi ia 0 .
Для визначення невідомих R05 і R(2,3)4 будуємо план сил, задавшись
F
масштабом F Н/мм. Обираємо його так, щоб максимальна сила
відр.
виражалася відрізком до 100-300 мм, F 10 H / мм .
Складаємо вектори по рівнянню. З т. "b" проводимо пряму, перпендикулярну
x-x (осі руху повзуна), з т. i - пряму, паралельну ланці CD, на перетині одержуємо
т. a, тоді
R(2,3) ia F 97.29 10 972.9 H ;
R05 ab F 9.7 10 97 H .
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 32
Група 2-3 (див. аркуш МД-51.382.145.003 РР)
Це двухповодковая група. На ланки діють наступні сили:
- сили ваги: G2 і G3. Прикладені в т. S2 і т. S3.
- сили інерції: Fi2 і Fi3.
В шарнірі В прикладена сила R4(23) (паралельно і протилежно направлена до
вектора R(23)4 з плану сил групи 4-5).
Невідомими є:
- реакція в шарнірі А: R12;
- реакція в шарнірі О2 : RO3;
Для визначення R12 і RO3 складаємо рівняння:
n
R1,2 R1,2 R1,2
n
R03 R03 R03
Відомо, що: нормальна складова паралельна ланці, тангенційна –
перпендикулярна.
Для отримання R1,2 , складаємо рівняння:
M B(2) G2 h3 Fi 2 h4 M i 2 R1,2 ( AB) 0
Плечі беремо прямо з креслення в мм (див. аркуш МД-51.382.145.003 РР).
Звідки
G2 h3 Fi 2 h4 M i 2 272.00639.99 25.274162.85 2.627
R1,2 55.112 H .
( AB) 272.006
Для отримання R03 , складаємо рівняння:
M B(3) R4(2,3) h5 M i 3 R03 (О2 B) 0
Звідки
R4(2,3) h5 M i 3 972.957.4+0.123
R03 646.349H
(О2 B) 86.4
При побудові плану сил для групи 2-3, відрізки, які в масштабі F 10 H / мм
будуть меншими за 3 мм, показувати не будемо.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 33
Складаємо рівняння рівноваги групи 2-3, прирівнюючи до 0 векторну суму
всіх сил, що діють на групу для визначення напрямку і значення реакції яка
виникає в шарнірі О2 і А:
n
R1,2 R1,2 G2 Fi 2 R4(2,3) G3 Fi 3 R03 R03n 0 ;
або у відрізках:
kl lm mn na ag gp pv vg gk 0 .
Будуємо план сил, складаючи відрізки відповідно до рівняння. Вибираємо
масштабний коефіцієнт F 10 H / мм . З т.g проводимо пряму, паралельну ланці
ВС, а з т.m проводимо пряму паралельну ланці АВ. На перетині отримуємо т. k.
R1,2 vk F 123.12 10 1231 H ;
RO3 km F 67.5 10 675 H .
4.6. Початкова ланка
У будь-якій робочій машині роль кривошипа виконує зубчасте колесо із
закріпленим на ньому пальцем (у цьому випадку колесо 6).
Для креслення зубчастого зачеплення потрібно визначити діаметри
початкових кіл. За завданням на курсовий проект: відомий модуль mIІI, числа
зубців коліс останньої ступені (z5, z6).
mII z5 12 13
r5 78 мм ,
2 2
mII z6 12 25
r6 150 мм ,
2 2
де mIІ – модуль останньої ступені приводу, мм.
Міжосьова відстань:
d5 d 6
aw 228 мм .
2
Креслимо в тому ж масштабі зачеплення в тому вигляді, у якому воно задано
в завданні.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 34
На початкову ланку діють сили:
- сила R21 тиску ланки ОА, Н;
- сила ваги G1 колеса, Н;
- зрівноважуюча сила Fзр і реакція в опорі RO1.
Невідомими є Fзр і реакція в опорі RO1.
Сила Fзр діє по лінії зачеплення, що проводимо під кутом зачеплення αw: для
нашого нерівнозміщеного зачеплення w 25,33 .
Силу Fзр визначаємо, склавши рівняння моментів сил відносно центра колеса
О:
M O1 R21 h6 Fзр rb 0 .
Звідки:
R21 h6 1231 64.32
Fзр 1165 H .
rb 67.97
Плечі беруться прямо із креслення в мм (див. аркуш МД-51.382.145.003 РР) .
Для визначення реакції RO1 складаємо векторне рівняння рівноваги всіх сил,
що діють на початкову ланку:
R21 G1 Fзр RO1 0 ,
або у відрізках:
st tu uv vs 0 .
Будуємо план сил за рівнянням, з'єднуємо т. v з т. s, тоді
RO1 vs F 112,32 15 1685 H .
4.7. Важіль М.Е.Жуковського
В кінці кінетостатичного аналізу ШВМ визначаємо зрівноважуючу силу
методом жорсткого важеля Жуковського. Для цього вичерчуємо повернений на
90˚ збільшений план швидкостей механізму для заданого положення і переносимо
паралельно самим собі в точки, що зображують всі зовнішні сили й сили інерції.
Ці точки на плані швидкостей знаходимо за подібністю.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 35
Зрівноважуючу силу Fy’ прикладаємо в т. а перпендикулярно до вектора Рa
(див. мал. 4.2).
Важіль Жуковського µV =0,0032 мс -1/мм
F зр'
h12 =117,02
a h10 =43,88
h8 =15,35
s2
Fi2 Mi2 Fi3
d
p,o1 ,o2 s4
s3 b c Mi4
h7 =124,75 G2 Mi3 Fi4 G5
h9 =129,34 Fk.o.
h11 =215,74 G3 Fi5
G4
215,91
Мал. 4.2. Важіль М.Е.Жуковського
Відповідно до теореми Н.Е.Жуковського важіль перебуває в рівновазі, якщо
сума всіх сил відносно полюса плану "р" дорівнює нулю.
Перерахуємо момент інерції:
ab 33.72
M i2 M i 2 2.627 0.065H м
AB 1360
pb 129.36
M i3 M i 3 0.123 0.022H м
О2C 720
pd 3.42
M i4 M i 4 0.17 0.0016H м
СD 360
Складемо рівняння суми моментів:
M p Fko Fi 5 G5 pd Fi 4 h12 G4 h11 G3 h9 Fi 3 h10 Fi 2 h8 G2 h7
M i2 M i3 M i4 Fзр pa1,2 0
Звідки:
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 36
Fзр
Fko Fi 5 G5 pd Fi 4 h12 G4 h11 G3 h9 Fi3 h10 Fi 2 h8 G2 h7 M i2 M i3 M i4
pa
(1400 7.864 65.018) 215.91 3.38117.02 72 215.74 144129.34 6.042 43.88 25.274 15.35 272.006 124.75
126.6
0.065 0.022 0.0016
1219H
126.6
Зрівноважуючі сили Fy й Fy’ не рівні тому що вони прикладені в різних
точках. Сила Fy є реальної, це миттєва сила, з якої одне зубчасте колесо діє на
інше.
Сила Fy’ - розрахункова сила.
Порівнюємо між собою зрівноважуючі моменти від сил Fy й Fy’:
M зр Fзр rb 1165 67.97 0.002 158.382H м ;
M y Fy rО1А 1219 0.129 156.818H м .
Різниця:
M y M y
M у 100% 0,818% 10% ,
My
що припустимо.
4.8. Висновки
Визначено реакції в кінематичних парах механізму, а також зрівноважуюча
сила двома методами. Різниця незначна.
Арк.
Змн. Арк. № докум. Підпис Дата
МД-51.382.145.002.ПЗ 37
You might also like
- Розрахунок та проектування пасової передачіDocument18 pagesРозрахунок та проектування пасової передачіarxiomed321No ratings yet
- Kursovoy Proekt Po AD PrimerDocument56 pagesKursovoy Proekt Po AD Primervasiliy vasilievichNo ratings yet
- Записка 5-3-3Document8 pagesЗаписка 5-3-3Артем НовакNo ratings yet
- Матвеев Шарун Проектирование Мидел-шпангоута НавалочникаDocument68 pagesМатвеев Шарун Проектирование Мидел-шпангоута НавалочникаAlfred RytenkovichNo ratings yet
- Пояснювальна ЛавренчукDocument28 pagesПояснювальна ЛавренчукВіка СиваченкоNo ratings yet
- Розрахунок та конструювання ЧЕРВ - ячних передач (Стадник В.АDocument49 pagesРозрахунок та конструювання ЧЕРВ - ячних передач (Стадник В.ААндрій ДядикNo ratings yet
- чпк вар 14Розрахунково графічної роботиDocument7 pagesчпк вар 14Розрахунково графічної роботиАнастасия МатвееваNo ratings yet
- Записка 32-1-3 (Курдибан)Document10 pagesЗаписка 32-1-3 (Курдибан)robotnitskiy03No ratings yet
- Л.Б. №3. Левченко М А 212-спDocument6 pagesЛ.Б. №3. Левченко М А 212-спworkatsea2023.v3No ratings yet
- Отрішко В.Д. Лаб52 ЕД-81Document14 pagesОтрішко В.Д. Лаб52 ЕД-81Vadim OtrishkoNo ratings yet
- Хрулєв, Сараев, СараеваDocument10 pagesХрулєв, Сараев, СараеваИринаNo ratings yet
- ТЕЕК Хід Роботи ЛР ДистанційнеDocument8 pagesТЕЕК Хід Роботи ЛР ДистанційнеMax GalyyykNo ratings yet
- ЛАБОРАТОРНА РОБОТА 2Document8 pagesЛАБОРАТОРНА РОБОТА 2Роман ДудникNo ratings yet
- Пояснювальна Записка І СеместрDocument43 pagesПояснювальна Записка І СеместрDa??No ratings yet
- ТЕЕК Хід роботи ЛР Дистанційне (New)Document9 pagesТЕЕК Хід роботи ЛР Дистанційне (New)Max GalyyykNo ratings yet
- переробитьDocument10 pagesпереробитьsoldatkinartem6No ratings yet
- Методичні вказівки до практичнихDocument62 pagesМетодичні вказівки до практичнихe7789843No ratings yet
- RGR Ч2 гр. АВ-21Document4 pagesRGR Ч2 гр. АВ-21Руслан ТорбякNo ratings yet
- ПРАКТИЧНА РОБОТА №7 Дет машDocument15 pagesПРАКТИЧНА РОБОТА №7 Дет машВадимNo ratings yet
- Методичні вказівки-ТБКВМ-р9Document62 pagesМетодичні вказівки-ТБКВМ-р9ureeezzzNo ratings yet
- Методичні вказівки-ТБКВМDocument62 pagesМетодичні вказівки-ТБКВМvadimka.repaNo ratings yet
- Кінематичний та силовий розрахунок привода корегований -Document7 pagesКінематичний та силовий розрахунок привода корегований -andrii.glushuck.yandex.ruNo ratings yet
- МВ 03-01-55 PDFDocument30 pagesМВ 03-01-55 PDFОлександр КрупинськийNo ratings yet
- Лабораторне заняття №1 Мироненко Данило 212 сп 3Document10 pagesЛабораторне заняття №1 Мироненко Данило 212 сп 3workatsea2023.v3No ratings yet
- ПР завдання 23-24Document8 pagesПР завдання 23-24Андрій КолодійчукNo ratings yet
- Отрішко В.Д. Лаб52 ЕД-81Document13 pagesОтрішко В.Д. Лаб52 ЕД-81Vadim OtrishkoNo ratings yet
- 8 Магн.гістерезис 2021Document8 pages8 Магн.гістерезис 2021slxxgdNo ratings yet
- Лаб 6-7Document14 pagesЛаб 6-7Майк МишаNo ratings yet
- Lab 12Document6 pagesLab 12orlovalessonsNo ratings yet
- Етм 3лабDocument5 pagesЕтм 3лабpsekmtrNo ratings yet
- Теоретичні відомості до лабораторної роботи № 3Document8 pagesТеоретичні відомості до лабораторної роботи № 3Mary KonNo ratings yet
- Л.Б. №4 Левченко М. а. 212-спDocument5 pagesЛ.Б. №4 Левченко М. а. 212-спworkatsea2023.v3No ratings yet
- 4MTFK (H) 1322LB 4 4 11 1410 27,5 0,87 215 195 152Document3 pages4MTFK (H) 1322LB 4 4 11 1410 27,5 0,87 215 195 152Илля МаслюкNo ratings yet
- 031 3Document6 pages031 3lustigjoseph69No ratings yet
- розрахунки курсоваDocument9 pagesрозрахунки курсоваAhmed waleedNo ratings yet
- лаба 1 раDocument8 pagesлаба 1 раBitva ZamkovNo ratings yet
- CyberpunkDocument7 pagesCyberpunkВлад ГорзовNo ratings yet
- Домашнє завданняDocument8 pagesДомашнє завданняЦветы АгныNo ratings yet
- Lab2 3Document8 pagesLab2 3BislyukNo ratings yet
- ПрактикаDocument39 pagesПрактикаSteve ToujoNo ratings yet
- Приклад оформлення ЛР 4Document5 pagesПриклад оформлення ЛР 4sergwot2004No ratings yet
- A Winter's Walk With Cowper Illustrated by Wedworth WadsworthDocument30 pagesA Winter's Walk With Cowper Illustrated by Wedworth WadsworthdubilujNo ratings yet
- АД КЗ Варіант 8Document42 pagesАД КЗ Варіант 8Виталий ТимченкоNo ratings yet
- B ReportDocument5 pagesB ReportAdiFMNo ratings yet
- 39E21 Diplom Rozrobka Pasivnogo TermodatchikaDocument74 pages39E21 Diplom Rozrobka Pasivnogo TermodatchikaIurie TaralungaNo ratings yet
- ДСТУ 3692-98 Воздухосборники Для Воздушных Стационарных Компрессоров Общего Назначения. Технические УсловияDocument12 pagesДСТУ 3692-98 Воздухосборники Для Воздушных Стационарных Компрессоров Общего Назначения. Технические УсловияЕТМNo ratings yet
- Практичне заняття 11Document13 pagesПрактичне заняття 11myslynska-bf11No ratings yet
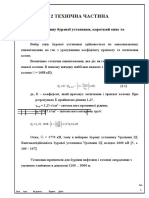
- 2 Технічна частинаDocument8 pages2 Технічна частинаВлад КоротунNo ratings yet
- Lab 10Document5 pagesLab 10123 LuzhetskaNo ratings yet
- Lab1 2Document9 pagesLab1 211 КласNo ratings yet
- Lab1 2 PDFDocument9 pagesLab1 2 PDFVictor SkorniakovNo ratings yet
- Sab 310Document24 pagesSab 310Dmitriy GaponovNo ratings yet
- 1 Буй КНТ-20-4Document34 pages1 Буй КНТ-20-4Krisos dot comNo ratings yet
- Remorca Tehno PBN 20 Catalog PieseDocument34 pagesRemorca Tehno PBN 20 Catalog PieseAlin LuculeasaNo ratings yet
- МОЙ ДИПЛОМ!Document12 pagesМОЙ ДИПЛОМ!ArgusNo ratings yet
- Подивитись анотацію та купити на jurkniga.uaDocument17 pagesПодивитись анотацію та купити на jurkniga.uashelectvalentunNo ratings yet
- Lab2 3Document6 pagesLab2 3Deidara MidariNo ratings yet