You might also like
- Fanno RayleighDocument7 pagesFanno RayleighracoNo ratings yet
- Zmęczenie Niskocyklowe Elementów KonstrukcjiDocument4 pagesZmęczenie Niskocyklowe Elementów KonstrukcjikakaNo ratings yet
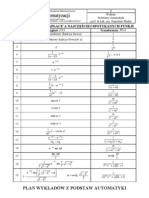
- Wyklad Podstawy Automatyki I Prof. DR Hab. Inż. Stanisław PłaskaDocument38 pagesWyklad Podstawy Automatyki I Prof. DR Hab. Inż. Stanisław Płaskaharran1No ratings yet
- Ugięcia Belek PDFDocument9 pagesUgięcia Belek PDFkreatormilleniumNo ratings yet
- Wykład 2 MNEDocument14 pagesWykład 2 MNEapi-3707895No ratings yet
- Tabela Trans z2Document2 pagesTabela Trans z2edson.luis.silveiraNo ratings yet
- Wzory Do Teorii Z Podstaw Termodynamiki Dla USMDocument3 pagesWzory Do Teorii Z Podstaw Termodynamiki Dla USMsensacjeNo ratings yet
- Transformata LaplaceaDocument5 pagesTransformata Laplaceakborowska2406No ratings yet
- Table of Z TransformDocument2 pagesTable of Z TransformMohamed ShaheenNo ratings yet
- Buk H. - Sprawozdawczość I Analiza Finansowa PrzedsiębiorstwaDocument157 pagesBuk H. - Sprawozdawczość I Analiza Finansowa PrzedsiębiorstwaKamila Stępień100% (1)
- Obiegi TeoretyczneDocument11 pagesObiegi Teoretycznekamtur100% (2)
- Podstawy Automatyki Wykład 3Document31 pagesPodstawy Automatyki Wykład 3JanHaloNo ratings yet
- Maszyny Pradu StalegoDocument33 pagesMaszyny Pradu Stalegossassi100% (5)
- Wyk Ad 8Document14 pagesWyk Ad 8sensacjeNo ratings yet
- Kwitansi Setoran AdiraDocument1 pageKwitansi Setoran Adiraagyl hidayatNo ratings yet
- Zadania Przygotowujace Test EkowydrukDocument2 pagesZadania Przygotowujace Test Ekowydrukhromanski20100% (1)
- Układy Wyzwalające I OpóźniajaceDocument7 pagesUkłady Wyzwalające I Opóźniajacemajkut14No ratings yet
- Prady ZwarcioweDocument46 pagesPrady ZwarcioweJan GumskiNo ratings yet
- Rownania Dynamiczne MatlabDocument19 pagesRownania Dynamiczne MatlabMarcin CzochraNo ratings yet
- Analiza Porównawcza Strat Mocy W Trzypoziomowych Falownikach Typu FLC Oraz Typu NPCDocument7 pagesAnaliza Porównawcza Strat Mocy W Trzypoziomowych Falownikach Typu FLC Oraz Typu NPCmateuszek3tiNo ratings yet
- Fizyka J Drowa Test BDocument3 pagesFizyka J Drowa Test Bdiuna12No ratings yet
- Notatki W11Document16 pagesNotatki W11gasweb19No ratings yet
- Lasery TelekomunikacyjneDocument32 pagesLasery TelekomunikacyjneMarekKowalskiNo ratings yet
- 38 Fizyka JądrowaDocument14 pages38 Fizyka Jądrowascribd.rg97dNo ratings yet
- Derek Bourgeois OP 114 TBNDocument12 pagesDerek Bourgeois OP 114 TBNjasonNo ratings yet
- MiBM Semestr 3 Wyklad 7Document45 pagesMiBM Semestr 3 Wyklad 7Witold RudzińskiNo ratings yet
- 2 - Model SilnikaDocument5 pages2 - Model Silnikakosa3No ratings yet
- Zależność Oporności Ciał Stał Zależność Oporności Ciał Stałych Od Temperatury Ych Od TemperaturyDocument5 pagesZależność Oporności Ciał Stał Zależność Oporności Ciał Stałych Od Temperatury Ych Od TemperaturyDawid SkarbowskiNo ratings yet
- One-Sided Laplace Tranform & One-Sided Z-TransformDocument2 pagesOne-Sided Laplace Tranform & One-Sided Z-TransformJY TanNo ratings yet
- Prawo OhmaDocument6 pagesPrawo OhmaNadia DolmatovaNo ratings yet
- Transformata ZDocument2 pagesTransformata ZKacper ZwaraNo ratings yet
- Kopia RachunekDocument20 pagesKopia RachunekjanczewmNo ratings yet
- w2 OpórDocument43 pagesw2 OpórDenys HavryliukNo ratings yet
- Elektrotechnika: Politechnika Wrocławska Instytut Maszyn, Napędów I Pomiarów ElektrycznychDocument43 pagesElektrotechnika: Politechnika Wrocławska Instytut Maszyn, Napędów I Pomiarów ElektrycznychMati GlińskiNo ratings yet
- Belka Timoshenko Na Sprężystym Podłożu Chodor-ProjektDocument13 pagesBelka Timoshenko Na Sprężystym Podłożu Chodor-ProjektDawid GabrysiakNo ratings yet
- Zadania Do RozwDocument3 pagesZadania Do RozwWikipedia.No ratings yet
- Czas Połowicznego RozpaduDocument2 pagesCzas Połowicznego RozpaduWojtekNo ratings yet
- Informacje o Budowie Atomu - Klasa IDocument2 pagesInformacje o Budowie Atomu - Klasa IPythonNo ratings yet
- ĆW - 3 - Pasywne Układy KorekcyjneDocument27 pagesĆW - 3 - Pasywne Układy KorekcyjneMichael MusiolNo ratings yet
- WZORY - Ruch DrgającyDocument1 pageWZORY - Ruch DrgającyAgnieszka PatynaNo ratings yet
- Przekształcenie Całkowe Fouriera: 1 Postać Zespolona Szeregu FourieraDocument7 pagesPrzekształcenie Całkowe Fouriera: 1 Postać Zespolona Szeregu FourieraLyszczuNo ratings yet
- Fizyka - Jadrowa 2 3Document63 pagesFizyka - Jadrowa 2 3Witold RudzińskiNo ratings yet
- Untitled NotebookDocument22 pagesUntitled NotebookskirpanolaNo ratings yet
- Charakterystyki Złożonych Układów Z Turbinami GazowymiDocument12 pagesCharakterystyki Złożonych Układów Z Turbinami Gazowymibxb6112No ratings yet
- Charakterystyki Czasowe PDFDocument14 pagesCharakterystyki Czasowe PDFMarcinRewersNo ratings yet
- Olimpiada Fizyczna-DoswiadczeniaDocument6 pagesOlimpiada Fizyczna-Doswiadczeniamksiem2411No ratings yet
- Fizyka J Drowa Test ADocument2 pagesFizyka J Drowa Test Adiuna12No ratings yet
- The Correlation Functions of Power As A New Proposition To Describe Power States in Circuits With Periodical Voltage and Current WaveformsDocument5 pagesThe Correlation Functions of Power As A New Proposition To Describe Power States in Circuits With Periodical Voltage and Current WaveformsMansour SalemNo ratings yet
- DiM w4Document13 pagesDiM w4Krzyszto FPNo ratings yet
- Charakterystyki Czasowe I CzestotliwoscioweDocument28 pagesCharakterystyki Czasowe I CzestotliwoscioweKilerNo ratings yet
- 1 Nawrotny Silnik DC Instrukcja PDFDocument2 pages1 Nawrotny Silnik DC Instrukcja PDFGrzesiek ZielińskiNo ratings yet
- LPPWD 01Document12 pagesLPPWD 01Filip ŻelaźnickiNo ratings yet
- Fraczak Piotr Analiza 97 2019Document12 pagesFraczak Piotr Analiza 97 2019Djamel BoukredimiNo ratings yet
- PTS - Lab 06 - Sprawozdanie - Jakub RzeszutekDocument10 pagesPTS - Lab 06 - Sprawozdanie - Jakub Rzeszutekincognito accountNo ratings yet
- Img 20200927 0004Document1 pageImg 20200927 0004AnnaNo ratings yet
- O Spadaniu KulDocument3 pagesO Spadaniu KulOliwier UrbańskiNo ratings yet
- ChemiaDocument4 pagesChemiakontoNo ratings yet
- 10 Kinetyczna Teoria GazowDocument4 pages10 Kinetyczna Teoria GazowstawiamklockiNo ratings yet
- Ts OpracowanieDocument15 pagesTs OpracowanieZgodajazNo ratings yet
- Lab 2Document3 pagesLab 2MossNo ratings yet
- CreepDocument6 pagesCreepMossNo ratings yet
- Skrypt - Gazy DoskonałeDocument6 pagesSkrypt - Gazy DoskonałeMossNo ratings yet
- Zadanie Domowe Z WK2 Seria4 - 2022Document1 pageZadanie Domowe Z WK2 Seria4 - 2022MossNo ratings yet
- Poradnia Dermatologiczna (1200) : Skierowanie Do Poradni SpecjalistycznejDocument2 pagesPoradnia Dermatologiczna (1200) : Skierowanie Do Poradni SpecjalistycznejMossNo ratings yet
- Poradnia Okulistyczna (1600) : Skierowanie Do Poradni SpecjalistycznejDocument2 pagesPoradnia Okulistyczna (1600) : Skierowanie Do Poradni SpecjalistycznejMossNo ratings yet
- Spawalnictwo STDocument35 pagesSpawalnictwo STMossNo ratings yet
- Egzamin 1Document3 pagesEgzamin 1MossNo ratings yet