You might also like
- Night Vision SistemDocument13 pagesNight Vision SistemDalibor Ognjanovic100% (1)
- Aktivni TempomatDocument18 pagesAktivni TempomatMarko VujosevicNo ratings yet
- Sistem Komfora Na VoziluDocument17 pagesSistem Komfora Na VoziluАлександар ЉубичићNo ratings yet
- Primena ITS Na VozilimaDocument20 pagesPrimena ITS Na VozilimamilosNo ratings yet
- Pametna Vozila SCBDocument12 pagesPametna Vozila SCBddrdeNo ratings yet
- Vdocuments - MX Aktivni-TempomatDocument18 pagesVdocuments - MX Aktivni-TempomatВидоје БујићNo ratings yet
- Pametna Vozila Prez. SCBDocument15 pagesPametna Vozila Prez. SCBddrdeNo ratings yet
- Savremeni Sistemi Na Motornim VozilimaDocument92 pagesSavremeni Sistemi Na Motornim VozilimaSlobodan DragićNo ratings yet
- Bezbednost Vozila - Osnovni Pojmovi PDFDocument31 pagesBezbednost Vozila - Osnovni Pojmovi PDFFilipNo ratings yet
- Vozilo Kao Faktor Bezbednosti SaobracajaDocument60 pagesVozilo Kao Faktor Bezbednosti SaobracajaAnonymous fIAHs9h2lENo ratings yet
- 09 - Sistem Za Sprecavanje Sudara 1Document15 pages09 - Sistem Za Sprecavanje Sudara 1Dušan Tijanić100% (1)
- Bezbednost Osnovni Pojmovi....Document27 pagesBezbednost Osnovni Pojmovi....v53No ratings yet
- Kadric Zerina - Kontrola I Upravljanje Stacionarnim SaobracajemDocument26 pagesKadric Zerina - Kontrola I Upravljanje Stacionarnim SaobracajemZerinaKadrićNo ratings yet
- Sistem Za Stabilizaciju Vozila ESPDocument18 pagesSistem Za Stabilizaciju Vozila ESPMitchell AshleyNo ratings yet
- Inteligntni Transportni SistemiDocument38 pagesInteligntni Transportni SistemiНикола Антић100% (1)
- Pasivna Bezbednost Vozila - Branimir Zivanovic 190-2011Document18 pagesPasivna Bezbednost Vozila - Branimir Zivanovic 190-2011Branimir ZivanovicNo ratings yet
- Vozilo Kao Faktor BezbednostiDocument15 pagesVozilo Kao Faktor Bezbednostiapi-19974321No ratings yet
- Dijagnostika Sistema Za Prenos Snage Kod Motornih VozilaDocument22 pagesDijagnostika Sistema Za Prenos Snage Kod Motornih VozilaDanijel MilkovicNo ratings yet
- Inteligenti Transportni Sistemi I Bezbjednost MotociklistaDocument65 pagesInteligenti Transportni Sistemi I Bezbjednost MotociklistaSavo BlagojevićNo ratings yet
- Bezbednost - PrezentacijaDocument14 pagesBezbednost - PrezentacijaDalibor StanojkovicNo ratings yet
- Autonomna VozilaDocument15 pagesAutonomna VozilaNikola KrsticNo ratings yet
- Elektronski Sistemi Za Stabilizaciju VozilaDocument22 pagesElektronski Sistemi Za Stabilizaciju Vozilalazar radojevicNo ratings yet
- Maturski Rad - Voinovic Tijana - IV-3Document25 pagesMaturski Rad - Voinovic Tijana - IV-3Marko KocicNo ratings yet
- Dijagnostika SeminarskiDocument32 pagesDijagnostika SeminarskiMarija Mara100% (1)
- AEBS DailyDocument7 pagesAEBS DailySlavko VukovicNo ratings yet
- СИСТЕМ Е-НАПЛАТЕ ПУТАРИНЕ- Немања ЈеленковићDocument31 pagesСИСТЕМ Е-НАПЛАТЕ ПУТАРИНЕ- Немања ЈеленковићMilena ŽivanovićNo ratings yet
- Аутономна возилаDocument13 pagesАутономна возилаDusan PejicNo ratings yet
- Vozila Seminarski RadDocument15 pagesVozila Seminarski RadSeminarski Radovi SaobraćajNo ratings yet
- 08 - Automatsko ParkiranjeDocument16 pages08 - Automatsko ParkiranjeDušan TijanićNo ratings yet
- Captiva UputstvoDocument304 pagesCaptiva Uputstvodarko2012No ratings yet
- Pasivna Bezbednost VozilaDocument11 pagesPasivna Bezbednost VozilaМихајло Лаћарац100% (4)
- Kontrola Ispravnosti Uređaja Za ZaustavljanjeDocument20 pagesKontrola Ispravnosti Uređaja Za ZaustavljanjeMarko Stanojčić100% (1)
- ABS - Sistem Protiv Blokiranja KočnicaDocument7 pagesABS - Sistem Protiv Blokiranja KočnicasenadgrabovacNo ratings yet
- ISPITIVANJKARBEZDocument9 pagesISPITIVANJKARBEZJonathan OliverNo ratings yet
- ITS U Zonama Radova Na Putu I Koristi Korišćenja Ovih SistemaDocument18 pagesITS U Zonama Radova Na Putu I Koristi Korišćenja Ovih SistemaVladislava StevićNo ratings yet
- Sistemi Elektronske Kontrole Kretanja Vozila - Sistem Za Kontrolu I Regulaciju Proklizavanja Točkova (ASR)Document16 pagesSistemi Elektronske Kontrole Kretanja Vozila - Sistem Za Kontrolu I Regulaciju Proklizavanja Točkova (ASR)Stefan GrujicNo ratings yet
- Clio KatalogDocument24 pagesClio KatalogPerica RadenkovicNo ratings yet
- GPS PraćenjeDocument19 pagesGPS PraćenjeAksentijević NatašaNo ratings yet
- Maturski Rad Zeljko Spasic 3Document27 pagesMaturski Rad Zeljko Spasic 3Nina TodorovicNo ratings yet
- ABS SistemDocument10 pagesABS SistemsolesokoNo ratings yet
- 8 OBD DijagnostikaDocument28 pages8 OBD DijagnostikaPredrag Bond JankovicNo ratings yet
- Upravljanje TunelimaDocument22 pagesUpravljanje TunelimaLejla LM100% (1)
- Karakteristike Sistema Vazdusnih Jastuka, Posmatrano Sa Aspekta Procene Stete Na Motornim VozilimaDocument12 pagesKarakteristike Sistema Vazdusnih Jastuka, Posmatrano Sa Aspekta Procene Stete Na Motornim Vozilimaseva0No ratings yet
- Autonomna VozilaDocument21 pagesAutonomna VozilaAtija LihićNo ratings yet
- Protivblokirajući Kočni Sistem Na Vozilu - ABSDocument14 pagesProtivblokirajući Kočni Sistem Na Vozilu - ABSVeliborNo ratings yet
- Senzori U Automobilu - Vladica Sinadinovic 12023Document17 pagesSenzori U Automobilu - Vladica Sinadinovic 12023MilomirJapundzicNo ratings yet
- Natasa Radanovic Telematski Sistemi U Drumskom Saobracaju Elektronska Naplata PDFDocument24 pagesNatasa Radanovic Telematski Sistemi U Drumskom Saobracaju Elektronska Naplata PDFDragana Kraljevic JankovicNo ratings yet
- Chevrolet Captiva 2007 SR UpustvoDocument298 pagesChevrolet Captiva 2007 SR UpustvoMarjan Stojanovic0% (1)
- Seminarski Rad DinamikaDocument9 pagesSeminarski Rad DinamikanovcictatjanaNo ratings yet
- Autonomna Vozila Kajtez PDFDocument56 pagesAutonomna Vozila Kajtez PDFMarkoMilev100% (1)
- VoziloDocument7 pagesVozilojottanovicNo ratings yet
- Dodatna Električna I Elektronska OpremaDocument3 pagesDodatna Električna I Elektronska OpremaIlija KojićNo ratings yet
- 07 - Aktivno OslanjanjeDocument7 pages07 - Aktivno OslanjanjeDušan TijanićNo ratings yet
- 23. Дијагностика системаDocument8 pages23. Дијагностика системаJovo PavlovicNo ratings yet
- SW L ProfilDocument26 pagesSW L ProfilDušan TijanićNo ratings yet
- Uvod U MehatronikuDocument33 pagesUvod U MehatronikuDušan TijanićNo ratings yet
- 08 - Automatsko ParkiranjeDocument16 pages08 - Automatsko ParkiranjeDušan TijanićNo ratings yet
- 09 - Sistem Za Sprecavanje Sudara 1Document15 pages09 - Sistem Za Sprecavanje Sudara 1Dušan Tijanić100% (1)
- Sigurnosni VentilDocument14 pagesSigurnosni VentilAllison MoodyNo ratings yet
- SW Instrukcija 2Document11 pagesSW Instrukcija 2Dušan TijanićNo ratings yet
- Mehanika 2-Predavanje3Document3 pagesMehanika 2-Predavanje3Sanel HadziniNo ratings yet
- 01 - Automatski Menjac 1Document13 pages01 - Automatski Menjac 1Dušan TijanićNo ratings yet
- Lagranzove Jednacine PDFDocument5 pagesLagranzove Jednacine PDFSasa StojkovicNo ratings yet
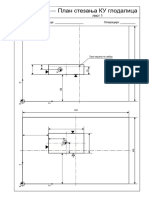
- 3 Plan Stezanja KU GlodalicaDocument2 pages3 Plan Stezanja KU GlodalicaDušan TijanićNo ratings yet
- Mehanika 2-Predavanje13Document4 pagesMehanika 2-Predavanje13Sanel HadziniNo ratings yet
- Uputstva Za Resavanje Zadataka v1 2Document48 pagesUputstva Za Resavanje Zadataka v1 2Dušan TijanićNo ratings yet
- Regionalno Takmičenje 3D - Zadatak Sa NavrtkamaDocument13 pagesRegionalno Takmičenje 3D - Zadatak Sa NavrtkamaDušan TijanićNo ratings yet
- Autom Prog GlodDocument1 pageAutom Prog GlodDušan TijanićNo ratings yet
- 2D Test ZnanjaDocument6 pages2D Test ZnanjaDušan TijanićNo ratings yet
- CNC Tehnologije Pred. 05Document15 pagesCNC Tehnologije Pred. 05Dušan TijanićNo ratings yet
- ME1 - Tekst Projektnog Zadatka - III - SmenaDocument2 pagesME1 - Tekst Projektnog Zadatka - III - SmenaDušan TijanićNo ratings yet
- 02 Predavanje 2016 I DeoDocument27 pages02 Predavanje 2016 I DeoDušan TijanićNo ratings yet
- VadicepDocument10 pagesVadicepDušan TijanićNo ratings yet
- Tehnološki Postupci - Zadatak 1Document19 pagesTehnološki Postupci - Zadatak 1Dušan TijanićNo ratings yet