You might also like
- RC Pile Cap Design (ACI318)Document4 pagesRC Pile Cap Design (ACI318)topukuet75% (4)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Ib Economics Formula SheetDocument6 pagesIb Economics Formula SheetSawar Raj Arora100% (1)
- Crown FC4500Document192 pagesCrown FC4500Cl LeeNo ratings yet
- 6.hydraulic Structure Lab ManualDocument57 pages6.hydraulic Structure Lab ManualAmmar Ahmad EED100% (2)
- Pontryagin Principle of Maximum Time-Optimal Control: Constrained Control, Bang-Bang ControlDocument14 pagesPontryagin Principle of Maximum Time-Optimal Control: Constrained Control, Bang-Bang ControldhayanethraNo ratings yet
- PD 6695 - 2 - 2008Document94 pagesPD 6695 - 2 - 2008William Harrow100% (2)
- Hydrodynamic Calculation Needle Valve Closing Flow Against The Direction of Movement of The PistonDocument23 pagesHydrodynamic Calculation Needle Valve Closing Flow Against The Direction of Movement of The Pistonmet-calcNo ratings yet
- Roller Coaster Forces and HeightsDocument14 pagesRoller Coaster Forces and HeightsHafizh Renanto AkhmadNo ratings yet
- EMT Short NotesDocument11 pagesEMT Short Notesshahswat mallickNo ratings yet
- Equações e ConstantesDocument2 pagesEquações e Constantesnetto99No ratings yet
- Lecture No 19Document7 pagesLecture No 19GGCTTS BooksNo ratings yet
- Vector Calculus-Lec-1 & 2Document41 pagesVector Calculus-Lec-1 & 2Subhan MansoorNo ratings yet
- Secondordersystem PDFDocument46 pagesSecondordersystem PDFDheeraj Kumar ReddyNo ratings yet
- Differential Equation - p6Document23 pagesDifferential Equation - p6Rondio LopezNo ratings yet
- 18IntegrationTechniquesDocument18 pages18IntegrationTechniquesأيوب عبد الأمير هزبر /تقنية غازNo ratings yet
- FISICA APLICADA AGRONOMIA – CS. AMBIENTALES RESUMEN DE FORMULAS 1o PARCIALDocument1 pageFISICA APLICADA AGRONOMIA – CS. AMBIENTALES RESUMEN DE FORMULAS 1o PARCIALMarce GonzNo ratings yet
- Formulario de Funciones MatematicasDocument2 pagesFormulario de Funciones MatematicasJUAN SALVADOR LARA CAMACHONo ratings yet
- Final Formula sheetDocument5 pagesFinal Formula sheetghccm56mpwNo ratings yet
- Dynamics 2014-15 SolutionDocument14 pagesDynamics 2014-15 SolutionYousif AL AyoubiNo ratings yet
- Formulario Mecánica ClásicaDocument2 pagesFormulario Mecánica ClásicaFer NegreteNo ratings yet
- Análisis Vectorial Cinemática: MRU MruaDocument2 pagesAnálisis Vectorial Cinemática: MRU MruaDavid Reynaldo Gasca SantoyoNo ratings yet
- FormulasDocument2 pagesFormulasHernández Ramírez SantiagoNo ratings yet
- 1st Grading Lesson 5 - GR 9Document9 pages1st Grading Lesson 5 - GR 9justanotherbroadwayfanNo ratings yet
- Formulario MaquinasDocument2 pagesFormulario MaquinasArturoNo ratings yet
- Reynolds Transport Theorem 09-28-2016Document29 pagesReynolds Transport Theorem 09-28-2016Anonymous K48TgviNo ratings yet
- El Sheet Elly Da3 2023Document22 pagesEl Sheet Elly Da3 2023Omar HosamNo ratings yet
- PPP (Lesson 2)Document114 pagesPPP (Lesson 2)Gabriel RamosNo ratings yet
- Razones Financieras de EficienciaDocument2 pagesRazones Financieras de EficienciaDavid AlejandroNo ratings yet
- Contoh Peta KarnaughDocument2 pagesContoh Peta KarnaughTaufiq Wahyu M.No ratings yet
- ST SP Sheet 1 SolnDocument11 pagesST SP Sheet 1 SolnBfhf HdhgNo ratings yet
- TRIGONOMETRIC FUNCTIONS SOLUTIONSDocument22 pagesTRIGONOMETRIC FUNCTIONS SOLUTIONSparamNo ratings yet
- Ciclos de Refrigeración y LicuefacciónDocument6 pagesCiclos de Refrigeración y LicuefacciónGUEVARA BERNARDO ARIANENo ratings yet
- Geo Semana7 2021 i.pptxDocument20 pagesGeo Semana7 2021 i.pptxKalia GabrielaNo ratings yet
- PPG MLRM Upto Autocorr PDFDocument20 pagesPPG MLRM Upto Autocorr PDFReetom GhoshNo ratings yet
- Sesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocument22 pagesSesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaLev LandauNo ratings yet
- Board Questions - ContinuityDocument9 pagesBoard Questions - Continuityadityaaaaaa002No ratings yet
- Física 1 Formulário LCEEMG MIEMMDocument2 pagesFísica 1 Formulário LCEEMG MIEMMSilva JoãoNo ratings yet
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument10 pagesHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- Board Questions - DeterminantsDocument16 pagesBoard Questions - Determinantsadityaaaaaa002No ratings yet
- Formulario Calculo Mauricio Rodríguez TaceaDocument11 pagesFormulario Calculo Mauricio Rodríguez TaceaMau TaceaNo ratings yet
- Financial Ratios & Formulas ExplainedDocument6 pagesFinancial Ratios & Formulas ExplainedwesamNo ratings yet
- Class7 - Energy MethodDocument46 pagesClass7 - Energy MethodAlvinNo ratings yet
- Ratios ExplainedDocument2 pagesRatios ExplainedJulia LopezNo ratings yet
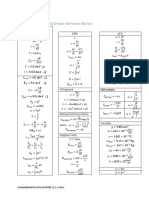
- Electromagnetism and Simple Harmonic Motion FormulasDocument1 pageElectromagnetism and Simple Harmonic Motion Formulas陳輝王No ratings yet
- Cheatsheet Dinamika RotasiDocument2 pagesCheatsheet Dinamika RotasiJessica PrimaulyNo ratings yet
- Actividad para El Cálculo de ProporcionesDocument1 pageActividad para El Cálculo de ProporcionesDulce CastroNo ratings yet
- Aplicaciones ETS PDFDocument17 pagesAplicaciones ETS PDFDaniela RíosNo ratings yet
- Ruben Mate 10 06Document12 pagesRuben Mate 10 06ruben.jhunior.2005No ratings yet
- Formulas de Costos y Punto de EquilibrioDocument1 pageFormulas de Costos y Punto de EquilibrioEdinson Ariel Oyarce GuerreroNo ratings yet
- Sesion 15Document11 pagesSesion 15Diego ValerioNo ratings yet
- Integrales TriplesDocument16 pagesIntegrales TriplesEvaristo MeryNo ratings yet
- Mechanical Vibrations Week 10: Extension To 2-DOF SystemsDocument8 pagesMechanical Vibrations Week 10: Extension To 2-DOF Systemszak masterNo ratings yet
- Clase 14 - Mate IV - Cambio de Temperatura 1Document6 pagesClase 14 - Mate IV - Cambio de Temperatura 1alicia morenoNo ratings yet
- Derivadas ParcialesDocument13 pagesDerivadas ParcialesValentina Duarte GamboaNo ratings yet
- Uiytrr PDFDocument28 pagesUiytrr PDFNSANGOUNo ratings yet
- CalculusDocument16 pagesCalculusapi-662361166No ratings yet
- Normal and Shear Stresses On Inclined PlainDocument2 pagesNormal and Shear Stresses On Inclined PlainPushkar MishraNo ratings yet
- Physical Constants: Handbook: Electromagnetic WaveDocument5 pagesPhysical Constants: Handbook: Electromagnetic WavedeevNo ratings yet
- 03.06.Differential form of the Momentum EquationDocument13 pages03.06.Differential form of the Momentum Equationdani khNo ratings yet
- Formulario Examen - Análisis de EEFFDocument2 pagesFormulario Examen - Análisis de EEFFDaniel Ramos Tres SesentaNo ratings yet
- Calculus Exam 3Document40 pagesCalculus Exam 3Shefaa QNo ratings yet
- Formula CardDocument1 pageFormula Cardandreipanganiban378No ratings yet
- Formulario para ImprimirDocument3 pagesFormulario para Imprimirramirezmariadelrosario340No ratings yet
- 7 Day Keto Kick-Starter: How to lose up to 2 Kg, look less bloated, sleep more soundly and feel more energetic in just 7 daysFrom Everand7 Day Keto Kick-Starter: How to lose up to 2 Kg, look less bloated, sleep more soundly and feel more energetic in just 7 daysNo ratings yet
- ICU Medical Gas NeedsDocument4 pagesICU Medical Gas NeedsGamerBro IDNo ratings yet
- Metfloor 60 - Composite Deck Slab Concrete VolumeDocument4 pagesMetfloor 60 - Composite Deck Slab Concrete VolumeHardeo Dennis ChattergoonNo ratings yet
- Outer Space Toastmasters MOST UPDATSDocument76 pagesOuter Space Toastmasters MOST UPDATSAbhay ChhabraNo ratings yet
- Consolidation Test Results and ParametersDocument25 pagesConsolidation Test Results and ParametersSAIB BRAHIMNo ratings yet
- BSC 5 Sem Physics 2015Document4 pagesBSC 5 Sem Physics 2015Mrudula YNo ratings yet
- Cheat Sheet - ElectromagnetismDocument26 pagesCheat Sheet - Electromagnetismu2100128No ratings yet
- EN 13706-3-2002 (Doc - Xuehai.net)Document6 pagesEN 13706-3-2002 (Doc - Xuehai.net)Qiu davidfantasyNo ratings yet
- A Grid-Compatible Virtual Oscillator Controller Analysis and DesignDocument7 pagesA Grid-Compatible Virtual Oscillator Controller Analysis and DesignAdnan KutsiNo ratings yet
- Ampacity and Other Design Considerations For Medium Voltage Cables Used in Renewable Energy ApplicationsDocument319 pagesAmpacity and Other Design Considerations For Medium Voltage Cables Used in Renewable Energy ApplicationsDominic SantiagoNo ratings yet
- ABG Measuring Water Flow Through A Geotextile TECH NOTEDocument1 pageABG Measuring Water Flow Through A Geotextile TECH NOTEMACOYNo ratings yet
- Lecture 2 v1Document26 pagesLecture 2 v1Anwar Hossain PolasNo ratings yet
- 3L-NPC SVPWM - ApfDocument8 pages3L-NPC SVPWM - Apfsgw.sgwNo ratings yet
- 4.7.5 Walls: CK Yk CKDocument2 pages4.7.5 Walls: CK Yk CKBertin BakariNo ratings yet
- Thermodynamics ShubhaDocument17 pagesThermodynamics ShubhaShubhajyoti KarmakarNo ratings yet
- Hitachi OESDocument2 pagesHitachi OESRahul DubeyNo ratings yet
- MAST10006 Assignment 1 2022s1Document5 pagesMAST10006 Assignment 1 2022s1Phil LiuNo ratings yet
- #1 Basic ConceptsDocument66 pages#1 Basic ConceptsSara TesfayeNo ratings yet
- The 2020 Magnetism Roadmap: Journal of Physics D: Applied PhysicsDocument45 pagesThe 2020 Magnetism Roadmap: Journal of Physics D: Applied PhysicsFrancisco EstrellaNo ratings yet
- Scalable Formation of Concentrated Monodisperse Lignin Nanoparticles by Recirculation-Enhanced Flash NanoprecipitationDocument10 pagesScalable Formation of Concentrated Monodisperse Lignin Nanoparticles by Recirculation-Enhanced Flash NanoprecipitationFarooq MuhammadNo ratings yet
- Pascua Project For Module 2 Problem Set With SolutionDocument14 pagesPascua Project For Module 2 Problem Set With SolutionDJ KillNo ratings yet
- 180 3 1242 - ItalyDocument11 pages180 3 1242 - ItalyLaura Lara OrtizNo ratings yet
- Ugrd-Nsci6100-2016s Calculus-Based Physics 1 Midterm q2Document13 pagesUgrd-Nsci6100-2016s Calculus-Based Physics 1 Midterm q2Leo Jade AbiertasNo ratings yet
- Experimental Studies On Bearing Capacity of Geosynthetic Reinforced Stone ColumnsDocument16 pagesExperimental Studies On Bearing Capacity of Geosynthetic Reinforced Stone ColumnsAhmed RamadanNo ratings yet
- Set Range and Measure with Water TesterDocument4 pagesSet Range and Measure with Water TesterlailiNo ratings yet