You might also like
- Lecture No 19Document7 pagesLecture No 19GGCTTS BooksNo ratings yet
- Clase 14 - Mate IV - Cambio de Temperatura 1Document6 pagesClase 14 - Mate IV - Cambio de Temperatura 1alicia morenoNo ratings yet
- Clase 4 - Mate IV - Ecuaciones Lineales PDFDocument17 pagesClase 4 - Mate IV - Ecuaciones Lineales PDFJhoann Andres Torres CocaNo ratings yet
- Formulario de Funciones MatematicasDocument2 pagesFormulario de Funciones MatematicasJUAN SALVADOR LARA CAMACHONo ratings yet
- Secondordersystem PDFDocument46 pagesSecondordersystem PDFDheeraj Kumar ReddyNo ratings yet
- Integrales TriplesDocument16 pagesIntegrales TriplesEvaristo MeryNo ratings yet
- Sesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocument22 pagesSesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaLev LandauNo ratings yet
- Clase 4 - Mate IV - Ecuaciones LinealesDocument17 pagesClase 4 - Mate IV - Ecuaciones LinealesPæül AlarconNo ratings yet
- Basilius 3.0Document4 pagesBasilius 3.0Piero yosip Basilio AylasNo ratings yet
- Lesson 3.4 - Solvable Groups of Trigonometric IntegralsDocument19 pagesLesson 3.4 - Solvable Groups of Trigonometric IntegralsChristine TenorioNo ratings yet
- 30.04.2021 Xii CH 3 MatricesDocument16 pages30.04.2021 Xii CH 3 Matrices V SinghNo ratings yet
- Aula 3 24 02 2021Document16 pagesAula 3 24 02 2021DenisAlexandreNo ratings yet
- Aula 3 25 08 2021Document16 pagesAula 3 25 08 2021DenisAlexandreNo ratings yet
- Firstordersystems PDFDocument98 pagesFirstordersystems PDFDheeraj Kumar ReddyNo ratings yet
- Clases 04 Al 050919 F Is PropDocument53 pagesClases 04 Al 050919 F Is PropMicael SorianoNo ratings yet
- Clase 11 - A - Mate III - Integrales Curvilíneas 3Document10 pagesClase 11 - A - Mate III - Integrales Curvilíneas 3Jhoann Andres Torres CocaNo ratings yet
- Aula 4 03 03 2021Document11 pagesAula 4 03 03 2021DenisAlexandreNo ratings yet
- Aula 9 EAD 20 04 20Document22 pagesAula 9 EAD 20 04 20Wembley OliveiraNo ratings yet
- Cheatsheet Dinamika RotasiDocument2 pagesCheatsheet Dinamika RotasiJessica PrimaulyNo ratings yet
- Contoh Peta KarnaughDocument2 pagesContoh Peta KarnaughTaufiq Wahyu M.No ratings yet
- Ruben Mate 10 06Document12 pagesRuben Mate 10 06ruben.jhunior.2005No ratings yet
- Geo Semana7 2021 IDocument20 pagesGeo Semana7 2021 IKalia GabrielaNo ratings yet
- Clase 3 - Mat. IV - Ecuaciones Difer. Exactas PDFDocument18 pagesClase 3 - Mat. IV - Ecuaciones Difer. Exactas PDFJhoann Andres Torres CocaNo ratings yet
- Board Questions - DifferentiabilityDocument14 pagesBoard Questions - DifferentiabilitySai tejaNo ratings yet
- Clase 11 - Mat IV - Transformada de LaplaceDocument9 pagesClase 11 - Mat IV - Transformada de LaplaceYAN ELIO MANRIQUE MOGOLLONNo ratings yet
- Sesion 15Document11 pagesSesion 15Diego ValerioNo ratings yet
- 2 4 Solving Equations With Variables On Both Sides Maze ActivityDocument1 page2 4 Solving Equations With Variables On Both Sides Maze ActivityDulce CastroNo ratings yet
- Studying Production and Trade Through An Input-Output Analysis FrameworkDocument2 pagesStudying Production and Trade Through An Input-Output Analysis FrameworkNina Dela CruzNo ratings yet
- PR - Alexia 14.0Document3 pagesPR - Alexia 14.0Piero yosip Basilio AylasNo ratings yet
- Hoja de Fórmulas para El ParcialDocument1 pageHoja de Fórmulas para El ParcialSabrina Celeste ImpróvolaNo ratings yet
- 18 Integration TechniquesDocument18 pages18 Integration Techniquesأيوب عبد الأمير هزبر /تقنية غازNo ratings yet
- UntitledDocument26 pagesUntitledAli AkbarNo ratings yet
- Integral Transform (Class-5)Document8 pagesIntegral Transform (Class-5)Beat SpNo ratings yet
- Differential Equation - p6Document23 pagesDifferential Equation - p6Rondio LopezNo ratings yet
- 19-03-2023Document37 pages19-03-2023Praveen praveenNo ratings yet
- PhysiqueDocument3 pagesPhysiqueErone DougassaNo ratings yet
- IM BrakingDocument10 pagesIM BrakingABCNo ratings yet
- 1st Grading Lesson 5 - GR 9Document9 pages1st Grading Lesson 5 - GR 9justanotherbroadwayfanNo ratings yet
- Board Questions - ContinuityDocument9 pagesBoard Questions - Continuityadityaaaaaa002No ratings yet
- Quantitative Methods SYMBOL of SUM, Double SUM and MultiplicationDocument24 pagesQuantitative Methods SYMBOL of SUM, Double SUM and MultiplicationCasper DarkusNo ratings yet
- Clase 12 - Mate III - Integrales Curvilíneas 4Document12 pagesClase 12 - Mate III - Integrales Curvilíneas 4Jhoann Andres Torres CocaNo ratings yet
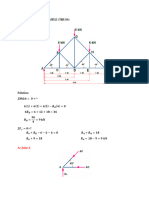
- CE100 Module 3 Example (Truss)Document4 pagesCE100 Module 3 Example (Truss)Stephanie Jean Magbanua CortezNo ratings yet
- T-Ecet210lec HW4 SumayaDocument2 pagesT-Ecet210lec HW4 SumayaMigsNo ratings yet
- Board Questions - DeterminantsDocument16 pagesBoard Questions - Determinantsadityaaaaaa002No ratings yet
- Formulario de QuimicaDocument3 pagesFormulario de QuimicaREOMNo ratings yet
- Vector Calculus-Lec-1 & 2Document41 pagesVector Calculus-Lec-1 & 2Subhan MansoorNo ratings yet
- 2 2 Solving Two Step Equations Maze ActivityDocument1 page2 2 Solving Two Step Equations Maze ActivityKarina Atayupanqui C.No ratings yet
- Clase 12 - Mate III - Integrales Curvilíneas 4Document12 pagesClase 12 - Mate III - Integrales Curvilíneas 4ND ALEXANDRANo ratings yet
- Formulario MaquinasDocument2 pagesFormulario MaquinasArturoNo ratings yet
- Lesson 3.3 - Integration by Trigonometric SubstitutionDocument28 pagesLesson 3.3 - Integration by Trigonometric SubstitutionChristine TenorioNo ratings yet
- 4th Sem Core T9 (Unit 3) (Class-4)Document3 pages4th Sem Core T9 (Unit 3) (Class-4)Beat SpNo ratings yet
- Ángulos NotablesDocument2 pagesÁngulos NotablesSALOMON LOPEZ APAZANo ratings yet
- Uiytrr PDFDocument28 pagesUiytrr PDFNSANGOUNo ratings yet
- Differentiation Rules For Algebraic Functions Higher Order Derivatives Optimization ProblemsDocument29 pagesDifferentiation Rules For Algebraic Functions Higher Order Derivatives Optimization ProblemsAntonio OngNo ratings yet
- Electric Flux Density, Gauss Law, Divergence PDFDocument35 pagesElectric Flux Density, Gauss Law, Divergence PDFSubhan MansoorNo ratings yet
- Aplicaciones ETS PDFDocument17 pagesAplicaciones ETS PDFDaniela RíosNo ratings yet
- His Last Bow (Deseret Alphabet ebook): Some Reminiscences of Sherlock HolmesFrom EverandHis Last Bow (Deseret Alphabet ebook): Some Reminiscences of Sherlock HolmesNo ratings yet
- 9752M&E Chapter1Document26 pages9752M&E Chapter1Bfhf HdhgNo ratings yet
- ICE Fuel Injection and Governor Print Spring 23Document12 pagesICE Fuel Injection and Governor Print Spring 23Bfhf HdhgNo ratings yet
- 9711M&E Chapter2Document11 pages9711M&E Chapter2Bfhf HdhgNo ratings yet
- Flammability Spring 22 PrintDocument5 pagesFlammability Spring 22 PrintBfhf HdhgNo ratings yet
- ICE Testing and Measurements Lec 8 Spring 23Document16 pagesICE Testing and Measurements Lec 8 Spring 23Bfhf HdhgNo ratings yet
- 352673rd LectureDocument14 pages352673rd LectureBfhf HdhgNo ratings yet
- ICE Classification of CC Lec 2 Part 3, 4 Spring 22 PrintDocument6 pagesICE Classification of CC Lec 2 Part 3, 4 Spring 22 PrintBfhf HdhgNo ratings yet
- Department: Energy and Power Engineering Cryogenics For 4Th Energy & Power Department Ref: "Refrigeration and Air Conditioning" ByrskhurmiandjkguptaDocument12 pagesDepartment: Energy and Power Engineering Cryogenics For 4Th Energy & Power Department Ref: "Refrigeration and Air Conditioning" ByrskhurmiandjkguptaBfhf HdhgNo ratings yet
- Systems Design Report 2 Without Ventilation (Ts 14)Document5 pagesSystems Design Report 2 Without Ventilation (Ts 14)Bfhf HdhgNo ratings yet
- Systems Design ReportDocument7 pagesSystems Design ReportBfhf HdhgNo ratings yet
- State Space-Case 1Document30 pagesState Space-Case 1Bfhf HdhgNo ratings yet
- Department: Energy and Power Engineering Cryogenics For 4Th Energy & Power Department Ref: "Refrigeration and Air Conditioning" ByrskhurmiandjkguptaDocument16 pagesDepartment: Energy and Power Engineering Cryogenics For 4Th Energy & Power Department Ref: "Refrigeration and Air Conditioning" ByrskhurmiandjkguptaBfhf HdhgNo ratings yet
- Department: Energy and Power Engineering Cryogenics For 4Th Energy & Power Department Ref: "Refrigeration and Air Conditioning" ByrskhurmiandjkguptaDocument10 pagesDepartment: Energy and Power Engineering Cryogenics For 4Th Energy & Power Department Ref: "Refrigeration and Air Conditioning" ByrskhurmiandjkguptaBfhf HdhgNo ratings yet
- Ref. & A C by Khurmi & Gupta CH - 2Document28 pagesRef. & A C by Khurmi & Gupta CH - 2Bfhf HdhgNo ratings yet
- Sol Mid Term 1 2022Document6 pagesSol Mid Term 1 2022Bfhf HdhgNo ratings yet
- Flow Chart For Adiabatic Flow of Ideal GaseDocument6 pagesFlow Chart For Adiabatic Flow of Ideal GaseBfhf HdhgNo ratings yet
- Control ValveDocument13 pagesControl ValveRatnakar PatilNo ratings yet
- Physics ProjectDocument46 pagesPhysics Projectpowerful jats76% (29)
- Finite Element Analysis: Procedure For Getting Normal Stress and Hoop StressDocument10 pagesFinite Element Analysis: Procedure For Getting Normal Stress and Hoop StressCrystal SuriyaNo ratings yet
- Physics Theory - EngDocument6 pagesPhysics Theory - EngA.Y.G.0% (1)
- Characteristics Length in Mesoscopic SystemDocument12 pagesCharacteristics Length in Mesoscopic SystemAnkan Das RoyNo ratings yet
- Flushing WhitepaperDocument2 pagesFlushing WhitepaperrajaramonNo ratings yet
- PHY131 hw7Document5 pagesPHY131 hw7younghoon.jungNo ratings yet
- Chapter-4: Metal CuttingDocument24 pagesChapter-4: Metal Cuttingbhushan wandreNo ratings yet
- Artikel Fisika Bahasa Inggris Tentang Waves-2Document4 pagesArtikel Fisika Bahasa Inggris Tentang Waves-2Xerxes Xanthe XyzaNo ratings yet
- Distance and Velocity Time Graphs Gizmo Student Exploration SheetDocument10 pagesDistance and Velocity Time Graphs Gizmo Student Exploration SheetReem ShakirNo ratings yet
- Functional Analysis of Tube Chain Conveyors. Part 1: General Design and Calculation PrinciplesDocument11 pagesFunctional Analysis of Tube Chain Conveyors. Part 1: General Design and Calculation PrinciplesHarish KumarNo ratings yet
- Chapter 4: Fluid Kinematics: Eric G. PatersonDocument34 pagesChapter 4: Fluid Kinematics: Eric G. PatersonSupriyo NahaNo ratings yet
- Transmission Systems: Module - IiDocument27 pagesTransmission Systems: Module - Iipesaru arjunNo ratings yet
- String TheoryDocument1 pageString Theoryzuzu_zuzu96No ratings yet
- Figure 1. Drag Coefficient As A Function of SphericityDocument9 pagesFigure 1. Drag Coefficient As A Function of SphericityPAULA ANDREA CARO BAEZNo ratings yet
- Chapter2.2frame 5bwindactions 5DDocument38 pagesChapter2.2frame 5bwindactions 5DKHAI HONG GANNo ratings yet
- Flywheel ExperimentDocument8 pagesFlywheel ExperimentSanil Khinchi100% (1)
- Quantum Theory and The Electronic Structure of AtomsDocument17 pagesQuantum Theory and The Electronic Structure of AtomsSalama NaumanNo ratings yet
- EXAM in DYNAMICS For TIP-QC FR Sir RegidorDocument2 pagesEXAM in DYNAMICS For TIP-QC FR Sir RegidorBee-Anne Bautista FranciscoNo ratings yet
- Simulation of Gas-Solid Flow & Design Modifications of Cement Plant CyclonesDocument8 pagesSimulation of Gas-Solid Flow & Design Modifications of Cement Plant CyclonesNael100% (1)
- Dhar Anuj - India 39 S Biggest Cover-Up 2012 AnujDocument49 pagesDhar Anuj - India 39 S Biggest Cover-Up 2012 AnujAbhishek PaloNo ratings yet
- Applied Physics (BCS-1) : Assignment#2Document2 pagesApplied Physics (BCS-1) : Assignment#2Muhammad Hammad MustafaNo ratings yet
- HERFLEX HF-50-180 - EnglishDocument2 pagesHERFLEX HF-50-180 - Englishlaroussi aymenNo ratings yet
- Lab Report - CHM02 - CO3 - Virtual Lab - Determining Heat Capacity of A Calorimeter - Grp2Document7 pagesLab Report - CHM02 - CO3 - Virtual Lab - Determining Heat Capacity of A Calorimeter - Grp2Antonio AbanoNo ratings yet
- Solution of Hanif CH PDFDocument218 pagesSolution of Hanif CH PDFSohail Sakhani100% (1)
- FRP Slab Flexure Strengthening With TYFO Fibrwrap System: Retrofitting of Anglo WarehouseDocument5 pagesFRP Slab Flexure Strengthening With TYFO Fibrwrap System: Retrofitting of Anglo Warehouseheherson juanNo ratings yet
- Terrain Settlement AnalysisDocument15 pagesTerrain Settlement AnalysisVinay BariaNo ratings yet
- Mastering Physics - Kinematics LabDocument11 pagesMastering Physics - Kinematics Labpalparas100% (2)
- Solution ManualDocument21 pagesSolution ManualAnonymous 3kVQgRA6n2% (45)
- NAIS Final Exam 2020-2021 Semester 2: Subject: G9 PhysicsDocument7 pagesNAIS Final Exam 2020-2021 Semester 2: Subject: G9 PhysicsHoracio FerrándizNo ratings yet