You might also like
- ФУНКЦІЇ ТА ЇХ ОСНОВНІ ВЛАСТИВОСТІDocument1 pageФУНКЦІЇ ТА ЇХ ОСНОВНІ ВЛАСТИВОСТІ2ngxf4fpkvNo ratings yet
- СР ФБЗDocument36 pagesСР ФБЗГлеб КрипакNo ratings yet
- Лекція 15. Дослідження Функцій За Допомогою ПохіднихDocument9 pagesЛекція 15. Дослідження Функцій За Допомогою ПохіднихirisNo ratings yet
- Лекція 15. Дослідження Функцій За Допомогою ПохіднихDocument9 pagesЛекція 15. Дослідження Функцій За Допомогою ПохіднихirisNo ratings yet
- 1474 Prezentacya Na Temu Funkcyi Yih GrafkiDocument22 pages1474 Prezentacya Na Temu Funkcyi Yih GrafkiТарас МалярNo ratings yet
- Розділ 7. Наближення ФункційDocument42 pagesРозділ 7. Наближення ФункційІгор ПоліщукNo ratings yet
- функція та їх властивостіDocument12 pagesфункція та їх властивостіARSENKANo ratings yet
- Правила Диференціювання і ПохідніDocument31 pagesПравила Диференціювання і ПохідніValia FedorchukNo ratings yet
- PR 4Document10 pagesPR 4SoshO PetrenkoNo ratings yet
- Lecture 2Document4 pagesLecture 2Bob AndersonNo ratings yet
- Lecture 3Document4 pagesLecture 3Bob AndersonNo ratings yet
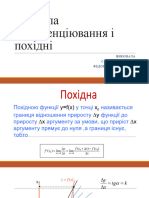
- Похідною функції y=f (x), за аргументом x називають границюDocument8 pagesПохідною функції y=f (x), за аргументом x називають границюЯна КраснолуцькаNo ratings yet
- Лекція 14. Основні Теореми Диференціального ЧисленняDocument11 pagesЛекція 14. Основні Теореми Диференціального ЧисленняirisNo ratings yet
- Ma-4-II. ФункціїDocument22 pagesMa-4-II. Функціїanton antonNo ratings yet
- Lab 3Document6 pagesLab 3Max SlobodianNo ratings yet
- 01 - 2023 - 02 - 06 - Визначений інтегралDocument13 pages01 - 2023 - 02 - 06 - Визначений інтегралДима ЛехановNo ratings yet
- Лекція11Document11 pagesЛекція11zxcdedinsaid07No ratings yet
- Лекция 6 исследование функцийDocument11 pagesЛекция 6 исследование функцийVeronica ParkerNo ratings yet
- Функції Та Їх Основні ВластивостіDocument15 pagesФункції Та Їх Основні ВластивостіmilenamankoneNo ratings yet
- Опорний Конспект Невизнвчений ІнтегралDocument3 pagesОпорний Конспект Невизнвчений ІнтегралНаталия ПронозаNo ratings yet
- UntitledDocument22 pagesUntitledivan56565No ratings yet
- 3 Vyznachenyy - IntegralDocument6 pages3 Vyznachenyy - IntegralMaxym HladunNo ratings yet
- УСЕ ПРО ФУНКЦІЇ НА НМТDocument12 pagesУСЕ ПРО ФУНКЦІЇ НА НМТkmaistrenko1802No ratings yet
- UntitledDocument44 pagesUntitledHOT CrossNo ratings yet
- МатМодЗадСВч2,3Document49 pagesМатМодЗадСВч2,3Yurii FedorukNo ratings yet
- ІІсем.ЛЕКЦІЯ 2.ВИЗНАЧ.ІНТDocument15 pagesІІсем.ЛЕКЦІЯ 2.ВИЗНАЧ.ІНТfodeke2428No ratings yet
- Ma2 FF FiDocument13 pagesMa2 FF FiDashaNo ratings yet
- Лекція 12Document18 pagesЛекція 12Аліна ВласикNo ratings yet
- 1 Nevyznach - IntegrDocument12 pages1 Nevyznach - IntegrMaxym HladunNo ratings yet
- ЛЕКЦІЯ 2Document8 pagesЛЕКЦІЯ 2fodeke2428No ratings yet
- 03 10 22 Математичні методи в обробці медичних данихDocument83 pages03 10 22 Математичні методи в обробці медичних данихvladagarmNo ratings yet
- pr04 PDFDocument15 pagespr04 PDFEdgard Wəllsn100% (1)
- 034Document43 pages034misvladyslavNo ratings yet
- Лекція. 13 Неперервність ФункціїDocument7 pagesЛекція. 13 Неперервність ФункціїОля КузанNo ratings yet
- Лекція 12Document13 pagesЛекція 12knf4fmb5myNo ratings yet
- Lecture 9Document5 pagesLecture 9Bob AndersonNo ratings yet
- ІНТЕГРАЛИ, ЩО ЗАЛЕЖАТЬ ВІД ПАРАМЕТРАDocument88 pagesІНТЕГРАЛИ, ЩО ЗАЛЕЖАТЬ ВІД ПАРАМЕТРАmariya.bystrykNo ratings yet
- 15.09 Функція Та Її ВластивостіDocument38 pages15.09 Функція Та Її ВластивостіВасилий ДекапольцевNo ratings yet
- 11 Klas Algebra Nelin 2011Document448 pages11 Klas Algebra Nelin 2011Alex IsNo ratings yet
- Застосування похіднихDocument18 pagesЗастосування похіднихValia FedorchukNo ratings yet
- PR 02Document9 pagesPR 02АнастасияNo ratings yet
- 06 Визначений інтегралDocument23 pages06 Визначений інтегралІгор ТкаченкоNo ratings yet
- Група 17 13.03, 16.03, 17.03 PDFDocument8 pagesГрупа 17 13.03, 16.03, 17.03 PDFanastasiia1467No ratings yet
- Algebra 11 Klas Nelin 2011Document448 pagesAlgebra 11 Klas Nelin 2011vladbartkozanNo ratings yet
- Ð Ð ÐºÑ Ñ Ñ 16Document6 pagesÐ Ð ÐºÑ Ñ Ñ 16настя 47No ratings yet
- 4 Formula - Nyutona - LeybnicaDocument6 pages4 Formula - Nyutona - LeybnicaMaxym HladunNo ratings yet
- вишматDocument14 pagesвишматИрина ПалинкоNo ratings yet
- 1 - Класичні задачі ВЧDocument5 pages1 - Класичні задачі ВЧ111111No ratings yet
- Опорний Конспект Невизнвчений ІнтегралDocument3 pagesОпорний Конспект Невизнвчений ІнтегралНаталия ПронозаNo ratings yet
- 374181Document7 pages374181Евгения СидоренкоNo ratings yet
- 374181Document7 pages374181Евгения СидоренкоNo ratings yet
- Лекція 19. Визначений ІнтегралDocument4 pagesЛекція 19. Визначений ІнтегралСерёга ВойкккккNo ratings yet
- 372517Document8 pages372517Евгения СидоренкоNo ratings yet
- Вступ до матан!Document7 pagesВступ до матан!Баба ЗинаNo ratings yet
- Лаба 2 сем 2 СмоковичDocument7 pagesЛаба 2 сем 2 СмоковичpodkopvaNo ratings yet
- Група 17 13.03, 16.03, 17.03 PDFDocument8 pagesГрупа 17 13.03, 16.03, 17.03 PDFLiza BaranovaNo ratings yet
- ФДЗпDocument10 pagesФДЗпLiza ApilatNo ratings yet
- Тема 2 НЕЛІНІЙНЕDocument12 pagesТема 2 НЕЛІНІЙНЕIryna IgorivnaNo ratings yet
- Lecture 10-12Document11 pagesLecture 10-12Bob AndersonNo ratings yet