Professional Documents
Culture Documents
TMC423 Datasheet
Uploaded by
Marvin AguilarOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
TMC423 Datasheet
Uploaded by
Marvin AguilarCopyright:
Available Formats
TMC423 Data Sheet – (V1.
13 / June 20th, 2007) 1/22
TMC 423 – Datasheet
Serial Triple Incremental
Encoder Interface
EXT_RES
NSCS428
SDO428
PRA/IO
NSCS
VCCA
VCCI
NINT
GND
SDO
SCK
TCK
CLK
SDI
NC
GND COLUMN_PIN(0)
TDI COLUMN_PIN(1)
ENC1_A COLUMN_PIN(2)
ENC1_B COLUMN_PIN(3)
ENC1_N
ENC2_A
TMS GND
VCCI VKS (GND)
GND VPP (VCCA)
ENC2_B
ENC2_N SW_ROW_PIN(0)
ENC3_A SW_ROW_PIN(1)
TMC423
TRINAMIC Motion Control GmbH & Co. KG
ENC3_B SW_ROW_PIN(2)
ENC3_N
TQFP-100 Package SW_ROW_PIN(3)
Sternstrasse 67
STEP1 SW_ROW_PIN(4)
TRST SW_ROW_PIN(5)
D – 20357 Hamburg
LED_ROW_PIN(0)
DIR1 VCCI
GERMANY
VSV (VCCA)
VCCI LED_ROW_PIN(1)
STEP2 LED_ROW_PIN(2)
DIR2 LED_ROW_PIN(3)
WWW.TRINAMIC.COM
LED_ROW_PIN(4)
STEP3 LED_ROW_PIN(5)
DIR3 GND
REF(0)
REF(1)
REF(2)
STOPR(0)
STOPR(1)
STOPR(2)
PRB/IO
VCCI
TDO
SDO_D
SDI_D
SCK_D
NSCS_D
GND
NC
GND
STOPL(0)
STOPL(1)
STOPL(2)
VCCA
TMC423 Main Features
The TMC423 is a triple incremental encoder input chip, which interfaces to any SPITM compatible
controller. The TMC423 can especially be used in conjunction with the TMC428 triple stepper motor
controller to provide position verification or stabilization using some additional software. It integrates
24 bit counters for each encoder to provide a high position resolution without CPU interaction.
Further it allows dynamic resolution adaptation to allow direct comparison of encoder counters with
motors using different micro step resolution. All encoder counters can be latched synchronously, or
whenever a null channel event occurs, providing a position on strobe holding function. The TMC423
also provides a step / direction output with programmable signal shaping for the TMC428 as an
optional function. A multiplexer function is also integrated for the TMC428 reference switches.
Furthermore control and drive of a LED and switch matrix is implemented. All functions can also be
used in conjunction.
Applications
• Stepper Motor Position Verification
• Position Maintenance
• Incremental Encoder Interface Readout
• Step / Direction conversion for TMC428 systems
• Control of LED 6 x 4 Matrix and Switch 6 x 4 Matrix
Features
• Supports 2 and 3 channel incremental encoders with a wide range of resolutions
• Allows step / direction signal extraction from TMC428 output data stream
• Programmable pulse shaping for step / direction interface
• 24 bit integrated position resolution
• Programmable prescaler for Incremental Encoder Interface
• 4-times evaluation of encoder signals
• Fast 32 bit SPITM interface
• Can share SPITM interface with TMC428 and supplies separate interrupt output
• Integrates Reference Switch Multiplexers
• Package: TQ100
Note: SPI is Trademark of Motorola, Inc.
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 2/22
Revision History
Version Comment Date Name
Initial Version November 22, 2002 Technical Department
0.4 Corrected Array Switching Frequency January 23, 2003 Technical Department
0.5 First Customer Release January 24, 2003 Technical Department
0.6 Minor corrections March 11, 2003 Technical Department
Changes concerning new company TRINAMIC
0.6 Motion Control GmbH & Co. KG October 1st, 2004 Technical Department
th
0.7 Corrected Pinning: Position of CLK pin December, 15 , Technical Department
2004
Corrected Reset input in diagram, added
1.0 supply spec March, 15th, 2005 Technical Department
1.1 Added Application Environment examples March, 9th, 2007 Technical Department
1.1 Added encoder timing Apr, 4th, 2007 Dw
S/D Appl. corrected, added TMC428 SPI
1.2 datagram for S/D June 6th, 2007 HC
Figure 4 and Figure 5: TMC423 clock input
1.3 corrected; more detailed flag description June 20th, 2007 HC, Dw
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 3/22
Table of Contents
1 Pinout .............................................................................................................................................................................. 5
1.1 Pin Description .................................................................................................................................................... 6
1.2 Recommended Operating Conditions........................................................................................................... 7
1.3 Electrical Characteristics.................................................................................................................................... 7
2 Block Diagram ............................................................................................................................................................... 8
3 Application Environment ........................................................................................................................................... 9
3.1 Application Description..................................................................................................................................... 9
3.1.1 Application with TMC236 Stepper Motor Driver................................................................................... 9
3.1.2 Application with Step / Direction Power Stage ................................................................................... 9
3.2 Application Examples.......................................................................................................................................10
3.2.1 Application with TMC236 Stepper Motor Driver.................................................................................10
3.2.2 Application with Step / Direction Power Stage .................................................................................10
4 Dynamic Resolution Adaptation ............................................................................................................................11
5 Serial Peripheral Interface (SPI) with 32-bit Register .....................................................................................12
5.1 Description and Specification........................................................................................................................12
5.2 32-bit SPI Datagram Structure ......................................................................................................................13
5.3 SPI 32-bit Datagram Specification ...............................................................................................................13
5.3.1 Overview........................................................................................................................................................13
6 Incremental Encoder .................................................................................................................................................14
7 Configuration Datagrams.........................................................................................................................................15
7.1 Encoder Interface Prescaler and Null Event Configuration ..................................................................15
7.2 Encoder Interface Hold Register Operation ..............................................................................................16
7.3 Timer Logic Step Pulse Length and Delay ................................................................................................17
7.4 Control Register and Interrupt Control ......................................................................................................17
7.5 Switch Matrix Read...........................................................................................................................................17
7.6 LED Matrix Write................................................................................................................................................17
8 SPI-Protocol for Interface with 6-bit Register ...................................................................................................18
8.1 Step and Direction Pulse conversion..........................................................................................................18
9 LED and Switch Matrix..............................................................................................................................................19
10 Package dimensions..................................................................................................................................................20
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 4/22
List of Figures
Figure 1: Pinout TMC423 5
Figure 2: Block diagram of the TMC423 8
Figure 3: Application Environment 9
Figure 4: Example for Application with TMC236 Stepper Motor Driver 10
Figure 5: Example for Application with Step / Direction Power Stage 10
Figure 6: TMC423 Application 11
Figure 7: Timing diagram of the Serial Interface 12
Figure 8: Structure 32-Bit Interface 13
Figure 9: Overview TMC423 Registers 13
Figure 10: Encoder Output and Evaluation 14
Figure 11: Crosstalk on Encoder Wire 14
Figure 12: Step Direction conversion 18
Figure 13: Connection to the matrix 19
Figure 14: 100-Pin TQFP Top View 20
Figure 15: 100-Pin TQFP Side View 20
Figure 16: 100-Pin TQFP Side View Detail A 20
List of Tables
Table 1: TMC423 Pinout 7
Table 2: Operating Conditions 7
Table 3: Operating Conditions 7
Table 4: Prescaler factors for different motors and encoders 11
Table 5: Interrupt Flags 13
Table 6: SPI Datagram Prescaler 16
Table 7: SPI Datagram Hold Register 16
Table 8: SPI Datagram Step-/Dir logic 17
Table 9: SPI Datagram Control Register 17
Table 10: Switch Matrix Read 17
Table 11: LED Matrix Write 17
Table 12: SPI Datagram Step / Direction Converter 18
Table 13: Datagram example and RAM contents for three step-direction drivers 18
Table 14: TMC423 LED Matrix Pins 19
Table 15: TQFP Dimensions 21
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 5/22
1 Pinout
EXT_RES
NSCS428
SDO428
PRA/IO
NSCS
VCCA
VCCI
NINT
GND
SDO
SCK
TCK
CLK
SDI
NC
GND COLUMN_PIN(0)
TDI COLUMN_PIN(1)
ENC1_A COLUMN_PIN(2)
ENC1_B COLUMN_PIN(3)
ENC1_N
ENC2_A
TMS GND
VCCI VKS (GND)
GND VPP (VCCA)
ENC2_B
ENC2_N SW_ROW_PIN(0)
ENC3_A SW_ROW_PIN(1)
ENC3_B
TMC423 SW_ROW_PIN(2)
ENC3_N
TQFP-100 Package SW_ROW_PIN(3)
STEP1 SW_ROW_PIN(4)
TRST SW_ROW_PIN(5)
LED_ROW_PIN(0)
DIR1 VCCI
VSV (VCCA)
VCCI LED_ROW_PIN(1)
STEP2 LED_ROW_PIN(2)
DIR2 LED_ROW_PIN(3)
LED_ROW_PIN(4)
STEP3 LED_ROW_PIN(5)
DIR3 GND
REF(0)
REF(1)
REF(2)
STOPR(0)
STOPR(1)
STOPR(2)
STOPL(0)
STOPL(1)
STOPL(2)
PRB/IO
TDO
SDO_D
SDI_D
SCK_D
NSCS_D
GND
NC
GND
VCCI
VCCA
Figure 1: Pinout TMC423
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 6/22
1.1 Pin Description
Pin Location Dir Description
GND 1, 9, 36, 39, 51, 68, In Ground
69, 91
ENC1_A 3 In Incremental Encoder Interface 1 Channel A
ENC1_B 4 In Incremental Encoder Interface 1 Channel B
ENC1_N 5 In Incremental Encoder Interface 1 Channel N
(Connect to +5V if not used)
ENC2_A 6 In Incremental Encoder Interface 2 Channel A
ENC2_B 10 In Incremental Encoder Interface 2 Channel B
ENC2_N 11 In Incremental Encoder Interface 2 Channel N
(Connect to +5V if not used)
ENC3_A 12 In Incremental Encoder Interface 3 Channel A
ENC3_B 13 In Incremental Encoder Interface 3 Channel B
ENC3_N 14 In Incremental Encoder Interface 3 Channel N
(Connect to +5V if not used)
TDI 2 Connect to Ground
TMS 7 Connect to 5 Volt via Pull-Up Resistor
TRST 16 Connect to 5 Volt via Pull-Up Resistor
TDO 49 To be left open
TCK 100 Connect to Ground
VCCI 8, 20, 44, 58, 82 In Positive Power Supply 5 Volt
VCCA 35, 57, 67, 90 In Positive Power Supply 2.5 Volt
GND 39 In Unused input: Connect to Ground
CLK 88 In System Clock 16MHz
EXT_RES 87 In External Reset Low Active
NC 37, 89 In Connect to Ground
PRA / IO 92 To be left open
PRB / IO 34 To be left open
Step 1 15 Out Step/Direction Interface – Step Output Motor 1
Dir 1 18 Out Step/Direction Interface – Direction Output Motor 1
Step 2 21 Out Step/Direction Interface – Step Output Motor 2
Dir 2 22 Out Step/Direction Interface – Direction Output Motor 2
Step 3 24 Out Step/Direction Interface – Step Output Motor 3
Dir 3 25 Out Step/Direction Interface – Direction Output Motor 3
SDO_D 26 Out Step / Direction SPI MISO
SDI_D 27 In Step / Direction SPI MOSI
SCK_D 28 In Step / Direction SPI SCK
NSCS_D 29 In Step / Direction SPI NSCS
REF0 40 Out Reference switch output 1
REF1 41 Out Reference switch output 2
REF2 42 Out Reference switch output 3
STOPR0 43 In Right Stop Switch Motor 1
STOPR1 45 In Right Stop Switch Motor 2
STOPR2 46 In Right Stop Switch Motor 3
STOPL0 47 In Left Stop Switch Motor 1
STOPL1 48 In Left Stop Switch Motor 2
STOPL2 50 In Left Stop Switch Motor 3
COLUMN_PIN0 75 Out Column Drive Pin 0
COLUMN_PIN1 74 Out Column Drive Pin 1
COLUMN_PIN2 73 Out Column Drive Pin 2
COLUMN_PIN3 72 Out Column Drive Pin 3
SW_ROW_PIN0 65 In Switch Matrix Pin 0
SW_ROW_PIN1 64 In Switch Matrix Pin 1
SW_ROW_PIN2 63 In Switch Matrix Pin 2
SW_ROW_PIN3 62 In Switch Matrix Pin 3
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 7/22
SW_ROW_PIN4 61 In Switch Matrix Pin 4
SW_ROW_PIN5 60 In Switch Matrix Pin 5
LED_ROW_PIN0 59 Out LED Matrix Drive Pin 0
LED_ROW_PIN1 56 Out LED Matrix Drive Pin 1
LED_ROW_PIN2 55 Out LED Matrix Drive Pin 2
LED_ROW_PIN3 54 Out LED Matrix Drive Pin 3
LED_ROW_PIN4 53 Out LED Matrix Drive Pin 4
LED_ROW_PIN5 52 Out LED Matrix Drive Pin 5
SDO 99 Out SPI MISO
SDI 98 In SPI MOSI
SCK 97 In SPI SCK
NSCS 96 In SPI NSCS
SDO428 95 In SPI MISO Pin of TMC428
NSCS428 94 In SPI NSCS Pin of TMC428
NINT 93 Out Interrupt Output (low active)
Table 1: TMC423 Pinout
Note: Pins which are not marked in Figure 1: Pinout TMC423 on page 5 must be left open.
1.2 Recommended Operating Conditions
Parameter Value Unit
Clock Frequency (1) 16 MHz
Temperature 0 … + 70 °C
2.5 V Power Supply 2.25 … 2.75 VCCA
5.0 V Power Supply 4.50 … 5.50 VCCI
Table 2: Operating Conditions
1 – slower frequencies are also supported. Please take care about the timing information in this datasheet, since they are
based on 16MHz Clock Frequency.
1.3 Electrical Characteristics
Parameter Min Max Unit
Supply Current 2.5V 100 mA
Supply Current 5.0V 10 mA
(Output current = 0)
LED driver current per pin 20 mA
Input voltage level Low 0.8 V
Input voltage level High 2.4 V
Encoder input pulse length 2 tCLK
Encoder count rate fCLK
Table 3: Operating Conditions
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 8/22
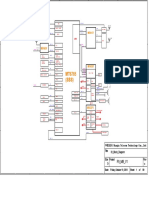
2 Block Diagram
LED SW COL EXT
5:0 5:0 3:0 RES
ENC1
A
Prescaler factor 10 bit
1/16, 2/16, ... 64
ENC1 Power On
B or 1/5, 2/5, ... 64
Reset
Matrix
prescaler+1 Control
ENC1
N
+
NSCS
ENC2
A
SCK
Encoder
ENC2 Encoder Counter SPI Interface
B signal
24+4 bit with 32 bit Reg
decoder SDI
ENC2
N M
U SDO
X
Control register
ENC3 Encoder Hold
A *Common Hold
Flag register 24 bit SDO
command 428
*Clear on N event *Interrupt enable
ENC3
B *Hold on N
NSCS
*N polarity 428
ENC3
N 3 x Encoder Interface
INT
Logik+ NINT
Latch
STEP
1
NSCS
_D
DIR1
SPI Interface
with 6 Bit reg SCK
_D
STEP
2
Timer logic
SDI
_D
DIR2 Step pulse Step pulse
length delay after dir
SDO
8 bit change 10 bit _D
STEP
3
DIR3
3 x Step / Direction converter
REF
MUX
STOP STOP STOP STOP STOP STOP
CLK VCC GND REF3 REF2 REF1
R3 R2 R1 L3 L2 L1
Figure 2: Block diagram of the TMC423
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 9/22
3 Application Environment
TMC423 as Incremental Encoder Interface TMC423 as Step / Direction converter
and Incremental Encoder Interface
Step/
Dir Incremental
Motor Encoder
Power
Stage
TMC Incremental
Motor Encoder
236
Step/
Dir Incremental
Motor Encoder
Power
Stage
TMC Incremental
Motor Encoder
236
Step/
Dir Incremental
Motor Encoder
Power
Stage
TMC Incremental
Motor Encoder
236 Step / Direction Interface
for up to three power stages
SPI-Interface
SPI-Interface TMC TMC
428 423
TMC TMC
428 423
SPI-Interface
SPI-Interface
µC µC
Figure 3: Application Environment
3.1 Application Description
3.1.1 Application with TMC236 Stepper Motor Driver
A complete close-loop motion control system consists of the TMC428 three-axis motion controller, the
powerful TMC236 stepper motor driver and the TMC423 Encoder Interface. The system is controlled by
an inexpensive microcontroller.
The main advantage of the system is that time critical communication to the TMC236 driver is
performed by the TMC428. The main purpose of the inexpensive microcontroller is to parameterize the
TMC428 and TMC423 and to send motion parameters like maximum speed or target position to the
TMC428. Position validation is done by reading the actual position of the TMC428 and the TMC423.
3.1.2 Application with Step / Direction Power Stage
Another possibility to built a close loop motion control system is to use the TMC423 as encoder
interface and also as a step direction converter. Thereto the TMC423 converts the SPITM datagrams
sent by the TMC428 into parameterizeable step and direction pulses. For parameterizing both the
TMC428 and TMC423 have to be connected via SPITM interface to an inexpensive microcontroller.
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 10/22
3.2 Application Examples
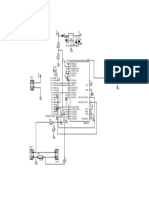
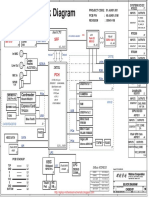
3.2.1 Application with TMC236 Stepper Motor Driver
This example illustrates the encoder connection and the use of reference switches with the TMC423
and additionally the SPI interface connections between TMC423, TMC428 and a microcontroller. The
communication to the drivers (e.g. TMC236) is performed via SPI by the TMC428 motion control chip.
+5V
16MHz CLK V5
+5V 16MHz CLK
REF1 REF1 V33
RESET
REF2 REF2 470nF
10k each
REF3 REF3 Test
GND
ENC1_A
SDI
ENC1_B
SCK TMC428 GND
Connect to encoders
ENC1_N
SDO
NSCS SDI_C SDI_S
ENC2_A SPI
SCK_C SCK_S
ENC2_B to
SDO428 SDO_C SDO_S
ENC2_N Drivers
NSCS428 nSCS_C nSCS_S
ENC3_A TMC423
ENC3_B +5V
ENC3_N
SS423
SS428
SCK
MISO
MOSI
+5V 10k to nSCS_D
TRST of TMC423
+2.5V VCCI1 - VCCI5 TMS
from nSCS_S µC
of TMC428 VCCA1 - VCCA4 GND1 - GND8
SDI_D SW_ROW0 - SW_ROW5
SCK_D Notes:
NSCS_D NC2
NC1
1. Application without LED and Switch matrix.
6x Reference Switch STOPR0 - STOPR2 TCK 2. If the NSCS428 pin is not in use it has to be tied to +5V.
Inputs (active high) STOPL0 - STOPL2 TDI 3. NSCS_D activates the reference switches (inputs
10k 10k STOPRx/STOPLx and outputs REFx).
GND
GND
Figure 4: Example for Application with TMC236 Stepper Motor Driver
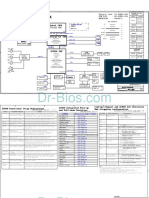
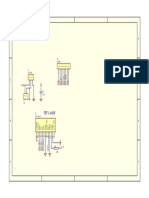
3.2.2 Application with Step / Direction Power Stage
Additionally to the previous example the use of the TMC423 as step/direction converter is shown. The
reference switches can be used as above.
µC
SS423
SS428
MOSI
MISO
SCK
16MHz CLK
+5V
RESET NSCS TMC428 +5V
SDO
10k each SCK SCK_C V5
ENC1_A SDI SDI_C
ENC1_B CLK 16MHz
Connect to encoders
ENC1_N SDO428 SDO_C
NSCS428 nSCS_C
ENC2_A V33
ENC2_B SDI_D SDO_S 470nF
ENC2_N SCK_D SCK_S Test
SDO_D SDI_S GND
ENC3_A NSCS_D nSCS_S
GND
ENC3_B TMC423
ENC3_N
STEP1
+5V DIR1
Step/DIR
STEP2
+2.5V VCCI1 - VCCI5 to
DIR2
Drivers
VCCA1 - VCCA4 STEP3
+5V DIR3
SDI_D
SCK_D
GND1 - GND8
10k Notes:
TRST SW_ROW3 - SW_ROW5 1. Application without LED/switch matrix and
TMS reference switches.
NC2 2. If the NSCS428 pin is not in use, it has to be tied
STOPR0 - STOPR2 NC1
to +5V.
STOPL0 - STOPL2 TCK
TDI
GND
GND
Figure 5: Example for Application with Step / Direction Power Stage
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 11/22
4 Dynamic Resolution Adaptation
The dynamic resolution adaptation is needed to link stepper motors and encoders with different
resolutions. The characteristics of the connected hardware must provided to the TMC423 by sending
the corresponding SPI telegram. (See 5.3.1 Overview on page 13 in this issue). The TMC423 multiplies
the encoder counter by a user selectable value in the range 1..1024, and then divides it by 16. When
using incremental encoders with N channel it is also possible to select between different behaviors
when the N channel is triggered.
Encoder:
Resolution: e.g.: 1000 steps / rotation
Stepper
TMC423 SPI Interface
motor
TMC423:
Stepper Motor: Prescaler = 3.2 -> 1000* 4 * 3.2 = 12800
Resolution: e.g.: 12800 steps / rotation
Figure 6: TMC423 Application
Table 4 shows a number of prescaler factors for possible combinations of micro step resolution and
encoder resolution. Note: The given number of pulses have to be multiplied by four since 4-times
encoder signal evaluation is used. (See Figure 10: Encoder Output and Evaluation on page 14).
Microstep Encoder Resolution [Pulses / Rotation]
s 1024 1000 512 500 256 250 200 125 50 25
12800 3.125 3.2 6.25 6.4 12.5 12.8 16 25.6 64 ----
6400 1.5625 1.6 3.125 3.2 6.25 6.4 8 12.8 32 64
3200 ---- ---- 1.5625 1.6 3.125 3.2 4 6.4 16 32
1600 ---- ---- ---- ---- 1.5625 1.6 2 3.2 8 16
800 ---- ---- ---- ---- ---- ---- 1 1.6 4 8
400 ---- ---- ---- ---- ---- ---- ---- ---- 2 4
Table 4: Prescaler factors for different motors and encoders
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 12/22
5 Serial Peripheral Interface (SPI) with 32-bit Register
5.1 Description and Specification
Four pins named nSCS, SCK, SDI and SDO form the serial peripheral interface from a microcontroller
to the TMC423. The communication between the microcontroller and the TMC423 takes place via
datagrams with a fixed length of 32 bit. The microcontroller acts always as master and the TMC423 as
slave.
The SPITM of the TMC423 behaves like a simple 32-bit shift register. Incoming serial data at pin SDI is
shifted with the rising edge of the clock signal SCK into the 32-bit register. The content of this
register is copied after 32-bits with the rising edge of the selection signal nSCS into a buffer register
of 32-bit length. The SPITM of the TMC423 sends back data read from registers immediately via the
SDO signal. It processes serial data synchronously to the clock signal CLK.
Because of on-the-fly processing of the input data stream, the serial microcontroller interface of the
TMC423 requires the serial data clock signal SCK to have a minimum low / high time of three clock
cycles. The data signal SDI driven by the microcontroller has to be valid at the rising edge of the
serial data clock input SCK. The maximum duration of the serial data clock period is unlimited.
A complete serial datagram frame has a fixed length of 32 bit. While the data transmission from the
microcontroller to the TMC423 is idle, the low active serial chip select input nSCS and also the serial
data clock signal SCK are set to high. The serial data input SDI of the TMC428 has to be driven by the
microcontroller. Like other SPI compatible devices, the SDO signal of the TMC423 is high impedance
‘Z’ as long as nSCS is high.
The signal nSCS has to be high for at least three clock cycles before starting a datagram transmission.
To initiate a transmission, the signal nSCS has to be set to low. Three clock cycles later the serial data
clock may go low. The most significant bit (MSB) of a 32 bit wide datagram comes first and the least
significant bit (LSB) is transmitted as the last one. A data transmission is finished by setting nSCS
high for three or more CLK cycles after the last rising SCK slope. nSCS and SCK change in opposite
order from low to high at the end of a transmission as these signals change from high to low at the
beginning. The timing of the serial microcontroller interface is outlined in Figure 7: Timing diagram of
the Serial Interface.
tCLK
tDATAGRAMuC
tSUCSC tHDCSC tSCKCL tSCKCH tHDCSC tSUCSC
CLK
nSCS
SCK tSD tSD tSD
SDI sdi_bit#31 sdi_bit#30 . . . sdi_bit#1 sdi_bit#0
tPD
SDO sdo_bit#31 sdo_bit#30 ... sdo_bit#1 sdo_bit#0
tIS tSI
30 x sampled SDI_C
1 x SDI_C sampled 1 x SDI_C sampled
one full 32 bit datagram
Figure 7: Timing diagram of the Serial Interface
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 13/22
5.2 32-bit SPI Datagram Structure
Datagram from TMC423 send to µC
3 3 2 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1
9 8 7 6 5 4 3 2 1 0
1 0 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0
INT 0 0 0 0 Data
Datagram from µC to TMC423
3 3 2 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1
9 8 7 6 5 4 3 2 1 0
1 0 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0
R
Address W Data
Figure 8: Structure 32-Bit Interface
Interrupt Flags [Bit] Name Description
31 INT_ext external Interrupt, e.g. TMC428
30 INT_enc1 N Signal of Encoder Interface 1 detected
29 INT_enc2 N Signal of Encoder Interface 2 detected
28 INT_enc3 N Signal of Encoder Interface 3 detected
Table 5: Interrupt Flags
5.3 SPI 32-bit Datagram Specification
5.3.1 Overview
Byte # Byte 3 Byte 2 Byte 1 Byte 0
Bit # 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
RW
Address
Control 0 0 0 0 0 0 0 1 Encoder 1 Prescaler Reserved
N Polarity
N Trigger
Direction
N Clear
N Hold
0 0 0 0 0 0 1 1 Encoder 2 Prescaler Reserved
0 0 0 0 0 1 0 1 Encoder 3 Prescaler Reserved
0 0 0 0 0 1 1 1 Encoder 1, 2, 3 Prescaler - set all commonly Reserved
Data 0 0 0 0 1 0 0 Encoder 1 Position Register
0 0 0 0 1 0 1 Encoder 2 Position Register
0 0 0 0 1 1 0 Encoder 3 Position Register
Step /Dir 0 0 0 0 1 1 1 1 Step Pulse Length Step Pulse Delay Reserved
Clear Flags
INT 0 0 0 1 0 0 0 1
Reg Hold
INT EN
Reserved
Matrix 0 0 0 1 0 0 1 0 Switch Row 3 Switch Row 2 Switch Row 1 Switch Row 0
0 0 0 1 0 1 0 1 LED Row 3 LED Row 2 LED Row 1 LED Row 0
Figure 9: Overview TMC423 Registers
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 14/22
6 Incremental Encoder
Incremental Encoders are translating the rotary motion of a shaft into a two-channel digital
quadrature output. The light emitted from a LED is focused onto a reflective code wheel. As the shaft
moves, the code wheel rotates, reflecting light from an alternating bright and dark pattern.
The TMC423 samples the incoming signals ENCx_a and ENCx_B from the incremental encoder. A
internal algorithm block counts the amount of edges generated by the encoder. A prescaler value can
be used to adapt the incremental encoder resolution to the stepper motor resolution.
For high resolution the TMC423 evaluates the encoder signals 4-times during each encoder step. This
has to kept in mind when choosing the prescaler value.
Step
Channel A
Channel B
Channel N
Evaluation
Figure 10: Encoder Output and Evaluation
Note: It is possible that the encoder signals ENCx_A, ENCx_B and ENCx_N are polluted with crosstalk
noise. Crosstalk could influence the internal logic, to overcome this problem internal filters are
applied to ensure correct functionality. Furthermore is saves the need for external analog filters.
e.g.: Figure 11: Crosstalk on Encoder Wire shows crosstalk from channel A to channel B.
Figure 11: Crosstalk on Encoder Wire
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 15/22
7 Configuration Datagrams
7.1 Encoder Interface Prescaler and Null Event
Configuration
The Encoder Interface Initialization datagram configures the parameterizeable encoder prescaler to
adapt the TMC423 for different incremental encoders. Furthermore the TMC423 behavior concerning
the N channel can be selected.
Example: A 1000 steps per rotation encoder is to connect at a stepper motor with 12800 microsteps per rotation. When the next
event at the high active N channel is found, the position register must set to zero. Only Encoder Interface 1 is connected.
The following datagram performs this task:
• Bits 31 down to 24 have to be set to 01HEX to select encoder interface 1
• The prescaler value has to set to 12800 / (1000*4) = 3.2. Therefore bits 23 down to 12 must set to 831HEX.
• The N channel is set up correctly when bits 11 down to 0 are set to A0HEX.
Bit Encoder Interface Initialization
31…28 “0000” Register Address
27…25 Interface Selection
000 = Interface 1
001 = Interface 2
010 = Interface 3
011 = Interface 1, 2 and 3
24 ‘1’
23…12 External Encoder Resolution and Corresponding Prescaler Factor
Bits 15 … 12: Fractional part of Factor. Unit: 1/16 (when bit 23 = 0) resp. 1/5 (bit 23 = 1)
Bits 22 … 16: Integer part of Factor
Bit 23: Switches Fractional part between 1/5 resolution or 1/16 resolution
Default:
(010)h (prescaler 1) (default value after power on)
Example settings:
Encoder: 1024 lines (4096 steps per rotation)
(032)h for 12800 micro steps per rotation (prescaler 3.125)
(019)h for 6400 micro steps (prescaler 1.5625)
Encoder: 1000 lines
(831) h for 12800 micro steps (prescaler 3.2)
(813)h for 6400 micro steps (prescaler 1.6)
Encoder: 512 lines
(064)h for 12800 micro steps (prescaler 6.25)
(032)h for 6400 micro steps (prescaler 3.125)
(019)h for 3200 micro steps (prescaler 1.5625)
Encoder: 500 lines
(862)h for 12800 micro steps (prescaler 6.4)
(831)h for 6400 micro steps (prescaler 3.2)
(813)h for 3200 micro steps (prescaler 1.6)
Encoder: 256 lines
(0C8)h for 12800 micro steps (prescaler 12.5)
(064)h for 6400 micro steps (prescaler 6.25)
(032)h for 3200 micro steps (prescaler 3.125)
(019)h for 1600 micro steps (prescaler 1.5625)
Encoder: 250 lines
(8C4)h for 12800 micro steps (prescaler 12.8)
(862)h for 6400 micro steps (prescaler 6.4)
(831)h for 3200 micro steps (prescaler 3.2)
(813)h for 1600 micro steps (prescaler 1.6)
Encoder: 200 lines
(100)h for 12800 micro steps (prescaler 16)
(080)h for 6400 micro steps (prescaler 8)
(040)h for 3200 micro steps (prescaler 4)
(020)h for 1600 micro steps (prescaler 2)
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 16/22
(010)h for 800 micro steps (prescaler 1)
Encoder: 125 lines
(993)h for 12800 micro steps (prescaler 25.6)
(8C4)h for 6400 micro steps (prescaler 12.8)
(862)h for 3200 micro steps (prescaler 6.4)
(831)h for 1600 micro steps (prescaler 3.2)
(813)h for 800 micro steps (prescaler 1.6)
Encoder: 50 lines (200 steps per rotation)
(400)h for 12800 micro steps (prescaler 64)
(200)h for 6400 micro steps (prescaler 32)
(100)h for 3200 micro steps (prescaler 16)
(080)h for 1600 micro steps (prescaler 8)
(040)h for 800 micro steps (prescaler 4)
(020)h for 400 micro steps (prescaler 2)
(010)h for 200 steps per rotation (prescaler 1)
11 N Polarity for Selected Interface
0 = active low (default)
1 = active high
When changing the polarity, please be aware that a single clear on N Event might be
triggered, and thus should not be initiated in the same write access.
10 Hold on N for Selected Interface
0 = no hold (default)
1 = active: Encoder counter freezes during 0 channel event.
9 Clear on N Event for Selected Interface
0 = no clear (default)
1 = active
When switched to active, then it depends on bit 8, if a clear event is issued only once, or
always when the N channel becomes active.
8 N Trigger Selection
0 = only at next N signal (default)
1 = always at N signal
The clear event last until the N signal goes inactive again. If earlier termination is desired,
i.e. to preset the encoder counter to a different value, disable “Clear on N” prior to
changing the position register.
7 add or sub register for each step (CW = looking onto the axis)
0= add for CW, sub for CCW (default)
1= add for CCW, sub for CW
6…0 Reserved
Table 6: SPI Datagram Prescaler
7.2 Encoder Interface Hold Register Operation
To read the actual contents of the position register or to preset the position register the following
command is to be used:
Bit Encoder Interface Control (Read/Preload Encoder Hold Register)
31…28 “0000” Register Address
27…25 Select Encoder Hold Register
100 = Hold register in encoder interface 1
101 = Hold register in encoder interface 2
110 = Hold register in encoder interface 3
24 Read or Preload Selection
0 = Read encoder hold register
1 = Preload encoder hold register
23…0 Encoder Hold Register Data
Table 7: SPI Datagram Hold Register
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 17/22
7.3 Timer Logic Step Pulse Length and Delay
To parameterize the step length and delay the next datagram is to be used:
Bit Write Step Pulse Length / Delay
31…25 “0000111” Register Address
24 ‘1’
23…16 Step Pulse Length (default value = 48(10) after PON)
15…6 Step Pulse Delay after Direction Change (default value = 160(10) after PON)
5…0 Reserved
Table 8: SPI Datagram Step-/Dir logic
7.4 Control Register and Interrupt Control
This datagram configures the interrupt control of the TMC423. When enabled, the N channel pulse of
all encoders is fed to the NINT pin.
Bit Control Register
31…25 “0001000” Register Address
24 ‘1’
23 Set Common Hold for Encoder Hold Registers
0 = no hold (default)
1 = freeze encoder hold registers
22 Encoder Interrupt Enable, if Null signal
0 = interrupt disable (default)
1 = interrupt enable
21 Clear Interrupt Flags
0 = no clear (default)
1= clear flags
20…0 Reserved
Table 9: SPI Datagram Control Register
7.5 Switch Matrix Read
Bit Control Register
31…25 “0001001” Register Address
24 ‘0’
23…18 Switch Matrix Register Row 3
17…12 Switch Matrix Register Row 2
11…6 Switch Matrix Register Row 1
5…0 Switch Matrix Register Row 0
Table 10: Switch Matrix Read
7.6 LED Matrix Write
Bit Control Register
31…25 “0001010” Register Address
24 ‘1’
23…18 LED Matrix Register Row 3
17…12 LED Matrix Register Row 2
11…6 LED Matrix Register Row 1
5…0 LED Matrix Register Row 0
Table 11: LED Matrix Write
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 18/22
8 SPI-Protocol for Interface with 6-bit Register
The 6-bit SPI Interface is used to receive step / direction information from the TMC428. The TMC423
processes the data and issues the corresponding step / direction signals via the step / direction pins.
Bit0 (Pulse 1) have to be sent first to the TMC423.
Bit Step / Direction Converter
0 Pulse 1
1 Direction 1
2 Pulse 2
3 Direction 2
4 Pulse 3
5 Direction 3
Table 12: SPI Datagram Step / Direction Converter
The order of the control signals serially sent from the TMC428 has to be defined. This can be done by
writing so called primary signal codes into the stepper motor driver datagram configuration area of
the on-chip configuration RAM of the TMC428. This signals codes are $13 (step first) and $12
(direction). To switch to the next motor the next motor bit (NxM) has to be set.
Position within Driver/motor NxM bit TMC428 signal RAM data TMC428
datagram code mnemonic of
primary signal
0 0 $13 $13 Step
1
1 1 $12 $32 Direction
2 0 $13 $13 Step
2
3 1 $12 $32 Direction
4 0 $13 $13 Step
3
5 1 $12 $32 Direction
Table 13: Datagram example and RAM contents for three step-direction drivers
8.1 Step and Direction Pulse conversion
Step pulses can be modified in their pulse width and delayed after an direction change was done.
The corresponding datagram (See 7.3) on page 17) is used to parameterize the Step / Dir interface.
step_in step pulse length
t
step_out step pulse delay
t
dir
Figure 12: Step Direction conversion
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 19/22
9 LED and Switch Matrix
The TMC423 can be used to drive a LED matrix or to get information from a switch matrix, whether
the switches are on or off. LEDs or switches are only active when the corresponding column is
selected by setting it to zero. The switch frequency of the column pins is fixed to 500 Hz at a clock
frequency of 16MHz. The LEDs are driven with a maximum current of 20mA.
The following Table 14: TMC423 LED Matrix Pins shows how the LED Matrix Write register is mapped
to the corresponding TMC423 pins to drive the LEDs.
TMC423 Pin: COLUMN_PIN [3:0] TMC423 Pin: LED_ROW_PIN [5:0]
Bit 3 Bit 2 Bit 1 Bit 0 LED_Matrix_Write [23:0]
0 1 1 1 23 22 21 20 19 18
1 0 1 1 17 16 15 14 13 12
1 1 0 1 11 10 9 8 7 6
1 1 1 0 5 4 3 2 1 0
Table 14: TMC423 LED Matrix Pins
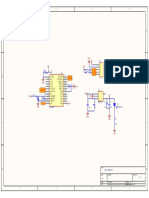
For correct external connection of the matrix please refer to the following Figure 13: Connection to
the matrix. If distortions causes by long PCB traces are to expect, then filter capacitors Cfilter of 100pF
have to be added.
TMC423
7407
Column Pin [3:0]
5V
10k
LED_ROW_PIN[5:0] SW_ROW_PIN [5:0]
Cfilter
(opt.)
180
Figure 13: Connection to the matrix
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 20/22
10 Package dimensions
Figure 14: 100-Pin TQFP Top View
Figure 15: 100-Pin TQFP Side View
Figure 16: 100-Pin TQFP Side View Detail A
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 21/22
JEDEC TQFP100
Equivalent MS-026 VAR BED
Dimension Min Nom Max
A 1.60
A1 0.05 0.15
A2 1.35 1.40 1.45
b 0.17 0.22 0.27
c 0.09 0.20
D/E 16.00 BSC
D1/E1 14.00 BSC
e 0.50 BSC
L 0.45 0.60 0.75
ccc 0.08
Theta 0 3.50 deg 7 deg
Table 15: TQFP Dimensions
Notes :
- all dimensions are in millimeters
- BSC Basic Spacing between Centers
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
TMC423 Data Sheet – (V1.13 / June 20th, 2007) 22/22
Life support policy
TRINAMIC Motion Control GmbH & Co. KG does not
authorize or warrant any of its products for use in life
support systems, without the specific written consent
of TRINAMIC Motion Control GmbH & Co. KG. Life
support systems are equipment intended to support
or sustain life, and whose failure to perform, when
properly used in accordance with instructions provided,
can be reasonably expected to result in personal injury
or death.
© 2004 TRINAMIC Motion Control GmbH & Co. KG
Information given in this data sheet is believed to
be accurate and reliable. However no
responsibility is assumed for the consequences
of its use nor for any infringement of patents or
other rights of third parties, which may result form
its use.
Specifications subject to change without notice.
Copyright © 2004 TRINAMIC Motion Control GmbH & Co. KG
You might also like
- SM J100M Tshoo 7 PDFDocument50 pagesSM J100M Tshoo 7 PDFRosbel HernandezNo ratings yet
- Notes:: Power Saving Reference Design Standard Reference DesignDocument1 pageNotes:: Power Saving Reference Design Standard Reference DesignAiltonDiasNo ratings yet
- ER-OLED0.96 Series InterfacingDocument1 pageER-OLED0.96 Series InterfacingBoulbeba JribiNo ratings yet
- Schematic Hand+Gesture+Car+Tx 2021-04-17Document1 pageSchematic Hand+Gesture+Car+Tx 2021-04-17ahmed mediaNo ratings yet
- SA-MAX700 Diagrama y Voltajes - 48016Document41 pagesSA-MAX700 Diagrama y Voltajes - 48016loquiNo ratings yet
- Sony Cxa3271age Fingerprint ScannerDocument16 pagesSony Cxa3271age Fingerprint ScannerPierina AstudilloNo ratings yet
- SM G3502T Tshoo 7Document39 pagesSM G3502T Tshoo 7Matheus GarciaNo ratings yet
- UM3758 Series - Z - A M - W-: I'ri-Siate Programmahle Encoder/DecoderDocument18 pagesUM3758 Series - Z - A M - W-: I'ri-Siate Programmahle Encoder/DecoderГеннадий ДармоедовNo ratings yet
- Weather Station SchematicDocument1 pageWeather Station SchematicferozaNo ratings yet
- Schematic - AVR Colour LCD Tester - LCR TC1 - 20180912214500 PDFDocument1 pageSchematic - AVR Colour LCD Tester - LCR TC1 - 20180912214500 PDFanshumantech anshumantech0% (1)
- SM G850FDocument119 pagesSM G850FErick UribeNo ratings yet
- Voltage Current MetterDocument1 pageVoltage Current MetterAYYOUB ALLAOUINo ratings yet
- Acer Aspire 4410-4410t 1 WISTRON jm41 - 08266-1Document40 pagesAcer Aspire 4410-4410t 1 WISTRON jm41 - 08266-1Maintenance broNo ratings yet
- Level 3 Repair: 8-1. Components LayoutDocument54 pagesLevel 3 Repair: 8-1. Components LayoutCarlos SilvaNo ratings yet
- ACER Aspire 7736 GM45 JV71-MV - DDR3Document62 pagesACER Aspire 7736 GM45 JV71-MV - DDR3miecho1985No ratings yet
- A351 Service ManualDocument15 pagesA351 Service ManualDark FoxNo ratings yet
- MB - Manual - B650m-Aorus-Pro - Elite - Ax - 1201 - E-1-39 (1) - 27Document1 pageMB - Manual - B650m-Aorus-Pro - Elite - Ax - 1201 - E-1-39 (1) - 27Виталий СоламанинNo ratings yet
- Reflow Control Board PDFDocument1 pageReflow Control Board PDFRafael Ruiz CabreraNo ratings yet
- Level 3 Repair: 8-1. Block DiagramDocument54 pagesLevel 3 Repair: 8-1. Block DiagramAndroid Schematics and CircuitsNo ratings yet
- MT6765 (SBS) : Project: MT6765 LPDDR3 Ref - SCH Top LevelDocument32 pagesMT6765 (SBS) : Project: MT6765 LPDDR3 Ref - SCH Top LevelMarcio PimentelNo ratings yet
- Schematic Hand+Gesture+Car+Rx 2021-04-17Document1 pageSchematic Hand+Gesture+Car+Rx 2021-04-17REGINALDO BORIKO OKOMO NGUEMANo ratings yet
- Samsung A02 SchematicsDocument30 pagesSamsung A02 SchematicsAuto repair diagnostic cars / trucksNo ratings yet
- Block DiagramDocument1 pageBlock DiagramRiza VirsadaNo ratings yet
- P5100 Troubleshooting PDFDocument72 pagesP5100 Troubleshooting PDFDaniel CekulNo ratings yet
- SM-G570F Block Diagram: ConfidentialDocument42 pagesSM-G570F Block Diagram: ConfidentialGilson PereiraNo ratings yet
- Copia de M6102 - MB - P2 - ÕăþÉåÕø - 20191125Document21 pagesCopia de M6102 - MB - P2 - ÕăþÉåÕø - 20191125juan hilarioNo ratings yet
- JM41 Block Diagram: Intel CPUDocument40 pagesJM41 Block Diagram: Intel CPUMayank Mani SinghNo ratings yet
- Lenovo TB-8506X BlockDocument1 pageLenovo TB-8506X BlockSameer varshneyNo ratings yet
- Reference DesignDocument1 pageReference Designphiu100% (1)
- CNC-fabtroller SchematicDocument1 pageCNC-fabtroller SchematicTomi OzzyNo ratings yet
- Wistron GodzillaDocument61 pagesWistron Godzillarodrigootavio5No ratings yet
- Service Manual: ChassisDocument71 pagesService Manual: Chassisshark clubNo ratings yet
- 128-Megabit 2.7-Volt Dual-Interface Dataflash At45Db1282 PreliminaryDocument35 pages128-Megabit 2.7-Volt Dual-Interface Dataflash At45Db1282 PreliminarymhasansharifiNo ratings yet
- MT6768 (SBS) : MT6177M (LWG+LTG)Document31 pagesMT6768 (SBS) : MT6177M (LWG+LTG)pc partnerNo ratings yet
- TMS370Cx0x 8-Bit Microcontroller: FZ and FN Packages (Top View)Document49 pagesTMS370Cx0x 8-Bit Microcontroller: FZ and FN Packages (Top View)Edison PerezNo ratings yet
- Oppo Realme 3 SchematicDocument37 pagesOppo Realme 3 SchematichulkNo ratings yet
- SEN0142 SCHDocument1 pageSEN0142 SCHaaiioNo ratings yet
- Miniaturowy Zasilacz 3,3 I 5 VDocument2 pagesMiniaturowy Zasilacz 3,3 I 5 VZygmunt SzaryNo ratings yet
- XT2097-x (Malta Lite) - Schematics - L3 Repair PDFDocument21 pagesXT2097-x (Malta Lite) - Schematics - L3 Repair PDFWALTER CABRERANo ratings yet
- Eizo l367 Fa-1568 LCD Monitor SCHDocument9 pagesEizo l367 Fa-1568 LCD Monitor SCHVladimirNo ratings yet
- Troubleshooting PDFDocument42 pagesTroubleshooting PDFKiris Santacruz100% (1)
- SM-J260 Core 2Document22 pagesSM-J260 Core 2lfismael95No ratings yet
- Redmi 6a Schematic DiagramDocument34 pagesRedmi 6a Schematic DiagramKaran Matale80% (5)
- HP Pavilion dv2000 Intel 945 Akita 05232 Rev SD SchematicsDocument39 pagesHP Pavilion dv2000 Intel 945 Akita 05232 Rev SD SchematicsGyan PrakashNo ratings yet
- Monkmakesduino Arduino Compatible Board SchematicDocument1 pageMonkmakesduino Arduino Compatible Board SchematicWagner Gómez100% (1)
- SM-A260F Common Tshoo 7 PDFDocument24 pagesSM-A260F Common Tshoo 7 PDFRamíro ChocotecóNo ratings yet
- 1.44 TFT LCD SchematicDocument1 page1.44 TFT LCD SchematicerickNo ratings yet
- MT6572 SchematicDocument19 pagesMT6572 SchematicdomisoftNo ratings yet
- Acer - Travelmate 2423 (Ag1-910) PDFDocument40 pagesAcer - Travelmate 2423 (Ag1-910) PDFLos QuilmesNo ratings yet
- Sony Mbx-229 - Wistron Cadiz-Cp - Rev - 1mDocument57 pagesSony Mbx-229 - Wistron Cadiz-Cp - Rev - 1mLeandro SilvaNo ratings yet
- CADIZ-CP Block Diagram: Intel CPUDocument57 pagesCADIZ-CP Block Diagram: Intel CPUvnenovNo ratings yet
- SN 74 HC 166Document35 pagesSN 74 HC 166Carlos OrtegaNo ratings yet
- MX88V44 MxicDocument63 pagesMX88V44 MxicmirandowebsNo ratings yet
- Troubleshooting1 PDFDocument68 pagesTroubleshooting1 PDFanonymus algorithmNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (104-108)Document5 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (104-108)mjd rNo ratings yet
- Road To VlsiDocument8 pagesRoad To VlsiAbhinandan GhosalNo ratings yet
- Lastexception 63820220204Document13 pagesLastexception 63820220204Matías FigueroaNo ratings yet
- FEM-9 221 EnglischDocument9 pagesFEM-9 221 EnglischxgclNo ratings yet
- Big Data For Open Innovation in SMEs and Large CorporationsDocument17 pagesBig Data For Open Innovation in SMEs and Large CorporationsJuan Carlos Álvarez SalazarNo ratings yet
- Uber Partner Agreement November 10 2014Document19 pagesUber Partner Agreement November 10 2014Prasad ShriyanNo ratings yet
- BABOK - Techniques by KADocument1 pageBABOK - Techniques by KABenhar Masahod BLM-VLOGNo ratings yet
- Data Sheet: FeaturesDocument8 pagesData Sheet: FeatureschristianNo ratings yet
- Allplan 2014 SBS SysadmNetworkDocument157 pagesAllplan 2014 SBS SysadmNetworkcan canNo ratings yet
- Ils Z Rwy10 CatDocument1 pageIls Z Rwy10 CatDante RussiaNo ratings yet
- Vapor-Logic 6 V V: Installation and Operation Manual N O in ODocument108 pagesVapor-Logic 6 V V: Installation and Operation Manual N O in OLeo ReyesNo ratings yet
- A Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchDocument7 pagesA Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchMarcoLuisDoradoPinedaNo ratings yet
- CSL5404 CompilerDesignLabDocument2 pagesCSL5404 CompilerDesignLabAyeshaNo ratings yet
- DFA AssessmentDocument328 pagesDFA AssessmentMALOTH BABU RAO76% (42)
- 07-08-2023 G-Tel Upadte T ListDocument23 pages07-08-2023 G-Tel Upadte T ListtelecommahadevNo ratings yet
- MikroTik Wireless Wire nRAYDocument3 pagesMikroTik Wireless Wire nRAYddddNo ratings yet
- Vinafix - VN - Tra Ma IC Richtek 1Document42 pagesVinafix - VN - Tra Ma IC Richtek 1jjoaquimmartinsNo ratings yet
- Coa Lab 4Document6 pagesCoa Lab 405raiuttuNo ratings yet
- Guidance For Industry - Part 11, Electronic Records Electronic Signatures - Scope and ApplicationDocument12 pagesGuidance For Industry - Part 11, Electronic Records Electronic Signatures - Scope and ApplicationSandeep KumarNo ratings yet
- Commit Log v1.0bDocument3 pagesCommit Log v1.0bcory ahumadaNo ratings yet
- Pandas PD: File PD Read - CSV File HeadDocument10 pagesPandas PD: File PD Read - CSV File HeadAbhijeet DubeyNo ratings yet
- Five Rules For Creating Great PresentationsDocument56 pagesFive Rules For Creating Great PresentationsAJier CHukyNo ratings yet
- Endoscopic Flushing Pump and AccessoriesDocument5 pagesEndoscopic Flushing Pump and AccessoriesЭнхЗаяаNo ratings yet
- Lom LogDocument2 pagesLom LogVilma CuculNo ratings yet
- Maybank2U Biz / Maybank Autocredit Application FormDocument4 pagesMaybank2U Biz / Maybank Autocredit Application Formmk100% (1)
- PWC Healthcare ReportDocument13 pagesPWC Healthcare ReportDark KnightNo ratings yet
- HotelDocument8 pagesHoteldhiren swainNo ratings yet
- Python Inheritance - Is It Necessary To Explicitly Call The Parents Constructor and Destructor - Stack OverflowDocument2 pagesPython Inheritance - Is It Necessary To Explicitly Call The Parents Constructor and Destructor - Stack OverflowvaskoreNo ratings yet
- User Manual (89v51rd2)Document4 pagesUser Manual (89v51rd2)rahul_kumbhar05No ratings yet
- Blood Count TrackerDocument8 pagesBlood Count TrackerSrinivasan .DNo ratings yet
- ALD Management (SRAN18.1 02)Document239 pagesALD Management (SRAN18.1 02)VVL1959No ratings yet