You might also like
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964From EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- L2 Basic AerodynamicsDocument26 pagesL2 Basic AerodynamicsERRAMESH1989No ratings yet
- Ad 1 Unit VIIDocument59 pagesAd 1 Unit VIIOsman KutluNo ratings yet
- Reviewer: Engr. R. Renigen: Patts Review Center Patts College of AeronauticsDocument38 pagesReviewer: Engr. R. Renigen: Patts Review Center Patts College of AeronauticsJasha KimNo ratings yet
- Unit 5 Ad2Document59 pagesUnit 5 Ad2chrislenardraghu92No ratings yet
- AerodynamicsDocument47 pagesAerodynamicsTom MingLiNo ratings yet
- Airfoil NomenclatureDocument25 pagesAirfoil Nomenclatureqasim zaheer100% (1)
- 4 AE451 Geometryselection NewDocument93 pages4 AE451 Geometryselection NewEmine ÇağlarNo ratings yet
- Flight DynamicsDocument49 pagesFlight DynamicsVũ Huy MừngNo ratings yet
- Aerodynamics Flight Vehicle TerminologyDocument16 pagesAerodynamics Flight Vehicle TerminologyJohn KevinNo ratings yet
- MECN 3350 - Aircraft Design and Performance - Module 2 - Unit 2.1 - Lesson 2.1.1Document105 pagesMECN 3350 - Aircraft Design and Performance - Module 2 - Unit 2.1 - Lesson 2.1.1Jose A Rosado LopezNo ratings yet
- © Aditya A. ParanjapeDocument74 pages© Aditya A. ParanjapeSeenu CnuNo ratings yet
- Attempt All Questions. For Full Credit, Write Dimensions in The Answers. - Maintain Academic IntegrityDocument5 pagesAttempt All Questions. For Full Credit, Write Dimensions in The Answers. - Maintain Academic IntegrityFabNo ratings yet
- Conception Aero Aero Dynamism e 2015Document97 pagesConception Aero Aero Dynamism e 2015mechmaster4uNo ratings yet
- Review of Airfoil AerodynamicsDocument28 pagesReview of Airfoil AerodynamicsHassanHishamNo ratings yet
- Aerodinamica InglesDocument42 pagesAerodinamica InglesGabriela AlcantarNo ratings yet
- AE172 Lecture Notes KutayDocument33 pagesAE172 Lecture Notes KutayMehmet YılmazNo ratings yet
- Forces and Moments Acting On An A/C: Chord LineDocument46 pagesForces and Moments Acting On An A/C: Chord LineMuhammed Hasan GUCLUNo ratings yet
- A Few More Points About Aerodynamics: - Control SurfaceDocument9 pagesA Few More Points About Aerodynamics: - Control SurfacemananNo ratings yet
- Chapter OneDocument16 pagesChapter OneAtalelew ZeruNo ratings yet
- Lecture Note 4Document49 pagesLecture Note 4Tolga Burak UysalNo ratings yet
- Aerofoil TerminologyDocument66 pagesAerofoil TerminologyafdsfagadgNo ratings yet
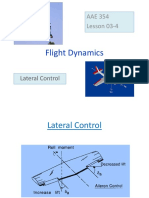
- Lec 03-4 - Lateral ControlDocument25 pagesLec 03-4 - Lateral ControlArslan MehmoodNo ratings yet
- AerodynamicsDocument42 pagesAerodynamicsFreda FungNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument29 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- 19AEE301 CA3 4 QP 2023Document3 pages19AEE301 CA3 4 QP 2023gnsvaravishwas03No ratings yet
- Unit-3 Airfoil and Geometry SelectionDocument29 pagesUnit-3 Airfoil and Geometry SelectionPAVAN KALYANNo ratings yet
- Subaero 2023Document42 pagesSubaero 2023Lem TanhuecoNo ratings yet
- Aero NicolaiDocument13 pagesAero NicolaiKevin CarvalhoNo ratings yet
- Lec 01-3 - Airfoil and Wing CharacteristicsDocument22 pagesLec 01-3 - Airfoil and Wing CharacteristicsAhmad Hassan100% (1)
- Aircrafts Truc T 4Document27 pagesAircrafts Truc T 4Meenakshi NathanNo ratings yet
- Estimating RC Model Aerodynamics and PerformanceDocument11 pagesEstimating RC Model Aerodynamics and PerformanceMito MiguelNo ratings yet
- Mae 331 Lecture 4Document10 pagesMae 331 Lecture 4ali68fat64No ratings yet
- Cliff - Aerofoils and Wings DragDocument9 pagesCliff - Aerofoils and Wings DragTimothy JimNo ratings yet
- 4-Lecture Notes Aerodynamics Introductory LectureDocument30 pages4-Lecture Notes Aerodynamics Introductory Lecturerogerfisica100% (2)
- Flight Mechanics: Flight PerformanceDocument97 pagesFlight Mechanics: Flight PerformanceMohd Azri100% (1)
- Aerodynamics Basics of AirfoilDocument63 pagesAerodynamics Basics of AirfoilaeroromeosNo ratings yet
- Interim Report ZainDocument20 pagesInterim Report ZainHannah ShaikhNo ratings yet
- 3310 Chapter 2Document88 pages3310 Chapter 2Muhammad Ishaq KhanNo ratings yet
- RC Plane and Aerofoil Design BST - CACULATIONS 2-1Document40 pagesRC Plane and Aerofoil Design BST - CACULATIONS 2-1saurabh shuklaNo ratings yet
- Ecm AssignmentDocument11 pagesEcm AssignmentNigel MutambanengweNo ratings yet
- PPL Procedures Handbook v3.0Document44 pagesPPL Procedures Handbook v3.0WaiZin MinHtetNo ratings yet
- +++++++ESTIMATING RC MODEL AERODYNAMICS AND PERFORMANCE-RC Airplane DesignDocument13 pages+++++++ESTIMATING RC MODEL AERODYNAMICS AND PERFORMANCE-RC Airplane Designumunera2997No ratings yet
- Aerodynamics GlossaryDocument43 pagesAerodynamics GlossarydbrcsNo ratings yet
- (Class 19) Introduction To Aeronautical EngineeringDocument48 pages(Class 19) Introduction To Aeronautical EngineeringFabian Torres100% (2)
- Intro To Aero 4 Aero TermsDocument30 pagesIntro To Aero 4 Aero Termsrahman akbarNo ratings yet
- Introduction To Aeronautical - EngineeringDocument21 pagesIntroduction To Aeronautical - EngineeringMelwinNo ratings yet
- XFLR5 and Stability AnalysisDocument70 pagesXFLR5 and Stability AnalysisPravin PrajapatiNo ratings yet
- BEHZADDocument2 pagesBEHZADSaadNo ratings yet
- Airfoils WingsDocument9 pagesAirfoils WingsaeroprinceNo ratings yet
- Aerodynamic Centers of Arbitrary Airfoils Below StallDocument42 pagesAerodynamic Centers of Arbitrary Airfoils Below StallJared EnocNo ratings yet
- Aircraft FlightDocument50 pagesAircraft FlightmgskumarNo ratings yet
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)
- Southern Marine Engineering Desk Reference: Second Edition Volume IFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume INo ratings yet
- Struc 1Document17 pagesStruc 1keeno manzanoNo ratings yet
- Chem ModuleDocument20 pagesChem Modulekeeno manzanoNo ratings yet
- AENG 326L 5 - Technical Report No. 5 - VOLT S 5 Centre of GravityDocument7 pagesAENG 326L 5 - Technical Report No. 5 - VOLT S 5 Centre of Gravitykeeno manzanoNo ratings yet
- ManzanoDocument1 pageManzanokeeno manzanoNo ratings yet
- Introduction To Project Feasibility StudyDocument9 pagesIntroduction To Project Feasibility Studykeeno manzanoNo ratings yet
- Revision 4 Review PDFDocument5 pagesRevision 4 Review PDFkeeno manzanoNo ratings yet
- AENG417 (PPT 1 & 2 (Document7 pagesAENG417 (PPT 1 & 2 (keeno manzanoNo ratings yet
- Manual de OM Ingersoll Rand PDFDocument208 pagesManual de OM Ingersoll Rand PDFjairo0% (1)
- Shapes and Irregularities StructureDocument5 pagesShapes and Irregularities StructureZul FadhliNo ratings yet
- AE1314Document9 pagesAE1314Maria DazaNo ratings yet
- Air Conditioning Systems in BuildingsDocument38 pagesAir Conditioning Systems in BuildingsFarhan Danish100% (1)
- Standard Style Stuffing BoxDocument4 pagesStandard Style Stuffing BoxAdelzon KinteroNo ratings yet
- 7826/2, Nai Basti, Bara Hindu Rao, Delhi-110006 9310437878, 7532096840, 9210095968Document9 pages7826/2, Nai Basti, Bara Hindu Rao, Delhi-110006 9310437878, 7532096840, 9210095968raj sahilNo ratings yet
- Chapter 4 - Bolted Connections: A Beginner's Guide To The Steel Construction Manual, 13 Ed. (Old)Document3 pagesChapter 4 - Bolted Connections: A Beginner's Guide To The Steel Construction Manual, 13 Ed. (Old)perdhana2000No ratings yet
- UMC240 CamshaftDocument3 pagesUMC240 CamshaftBurik8No ratings yet
- (Wind Profile) : Chapter FiveDocument21 pages(Wind Profile) : Chapter FiveLuckie RookNo ratings yet
- Service Bulletin: Washing 2520 - 2530Document16 pagesService Bulletin: Washing 2520 - 2530Łukasz KozlowskiNo ratings yet
- VW Fluid Capacity Chart 2006Document6 pagesVW Fluid Capacity Chart 2006Gerardo RodríguezNo ratings yet
- Conv HT 2Document4 pagesConv HT 2Alothman ONo ratings yet
- 404 344405 454 Tandem Drive Axles Older May 1999Document36 pages404 344405 454 Tandem Drive Axles Older May 1999Keith McCann100% (1)
- Checklist For RatingsDocument4 pagesChecklist For RatingsOILER GABRIOLA, MARK GREGORY IIINo ratings yet
- Volvo Penta Inboard Diesel: Technical DataDocument2 pagesVolvo Penta Inboard Diesel: Technical DataRune SkigelstrandNo ratings yet
- Manual de Servicio de AgilentDocument100 pagesManual de Servicio de Agilentjonathan_calixto_450% (2)
- Mech 499 Project Virtual and Physical Prototyping of Mechanical Systems Web-Controlled Dog Ball LauncherDocument26 pagesMech 499 Project Virtual and Physical Prototyping of Mechanical Systems Web-Controlled Dog Ball LauncherParesh GoelNo ratings yet
- Energy Efficiency of Refrigeration Systems PDFDocument11 pagesEnergy Efficiency of Refrigeration Systems PDFSafaa Hameed Al NaseryNo ratings yet
- Catalog Series 651 652 653 Air Preparation Products Aventics en 7453136Document66 pagesCatalog Series 651 652 653 Air Preparation Products Aventics en 7453136Marcelo GarayNo ratings yet
- Refrigeration Systems Refrigeration SystemsDocument50 pagesRefrigeration Systems Refrigeration SystemsHafzal GaniNo ratings yet
- Colchester Alpha Brochure 2021Document7 pagesColchester Alpha Brochure 2021KhalilullahNo ratings yet
- Electrical Steel Conduit 7 1 20 OkDocument2 pagesElectrical Steel Conduit 7 1 20 Okmuhamad faizNo ratings yet
- Khan 2000Document18 pagesKhan 2000HIMANSHU YADAVNo ratings yet
- Toyota Engine 1grfe 4 0 Repair ManualDocument7 pagesToyota Engine 1grfe 4 0 Repair Manualjames100% (49)
- Span 20 MDocument111 pagesSpan 20 MajayNo ratings yet
- Report On EGCB - Faujul Kabir - IUBATDocument124 pagesReport On EGCB - Faujul Kabir - IUBATFaujul KabirNo ratings yet
- NFS Most Wanted - RacingGuide1.3Document8 pagesNFS Most Wanted - RacingGuide1.3Raja PradeepNo ratings yet
- Checklist Oil BargeDocument10 pagesChecklist Oil BargealsitorNo ratings yet
- SV400 Shop Manual Section 1 2 3 and 5Document149 pagesSV400 Shop Manual Section 1 2 3 and 5EnzoManalang100% (1)
- CBD Aisc 360 10Document79 pagesCBD Aisc 360 10Angel VargasNo ratings yet