You might also like
- A Novel Compound Hybrid Flux Machine Towards Electric Vehicle TractionDocument6 pagesA Novel Compound Hybrid Flux Machine Towards Electric Vehicle TractionZaixin SongNo ratings yet
- Li 2021Document5 pagesLi 2021ravvacharan30No ratings yet
- Force Observer-Based Admittance Control Design For Robot ManipulatorsDocument4 pagesForce Observer-Based Admittance Control Design For Robot ManipulatorsSaleem RiazNo ratings yet
- Electronics 11 00132Document15 pagesElectronics 11 00132IknowhisfaceNo ratings yet
- Design of A Novel Dual Three-Phase Dual Stator Axial Flux Permanent Magnet Machine With Mechanical OffsetDocument6 pagesDesign of A Novel Dual Three-Phase Dual Stator Axial Flux Permanent Magnet Machine With Mechanical OffsetZaixin SongNo ratings yet
- Amr2013 065 06 060802Document53 pagesAmr2013 065 06 060802Jelena Blagojevic-IgnjatovicNo ratings yet
- Large-Signal Modeling For Full-Bridge LLC Resonant Converter Using Extended Hyperbolic Tangent FunctionDocument6 pagesLarge-Signal Modeling For Full-Bridge LLC Resonant Converter Using Extended Hyperbolic Tangent FunctionabdulsametyaramisNo ratings yet
- A CNN-Based Structure For Performance DegradationDocument13 pagesA CNN-Based Structure For Performance DegradationRafif WirareswaraNo ratings yet
- Sun 2020Document10 pagesSun 2020Lê Đức ThịnhNo ratings yet
- Design of Single-Tuned Harmonic Passive Filters For DC Electric Railway Traction Power Supply SystemDocument8 pagesDesign of Single-Tuned Harmonic Passive Filters For DC Electric Railway Traction Power Supply SystemDeep ShikhaNo ratings yet
- TIE2014High PerformanceIndirectCurrentControlScheme PDFDocument11 pagesTIE2014High PerformanceIndirectCurrentControlScheme PDFPABLO MAURONo ratings yet
- PARTIDocument16 pagesPARTIerode els erodeNo ratings yet
- Khoda para ST 2017Document9 pagesKhoda para ST 2017pouyanNo ratings yet
- A Unified Modeling and Control Design For PrecisioDocument11 pagesA Unified Modeling and Control Design For PrecisioNICONo ratings yet
- 1 PDFDocument13 pages1 PDFentindanNo ratings yet
- An Investigation On The Current Collection Quality of Railway Pantograph-Catenary Systems With Contact Wire Wear DegradationsDocument11 pagesAn Investigation On The Current Collection Quality of Railway Pantograph-Catenary Systems With Contact Wire Wear DegradationsDishant PatilNo ratings yet
- Kolekar 2019Document19 pagesKolekar 2019Naresh JonnaNo ratings yet
- Power Quality PaperDocument18 pagesPower Quality PaperSuresh SrinivasanNo ratings yet
- Design of Motor Shaft Power Meter Based On Phase Detection Using Improved All Phase FFTDocument6 pagesDesign of Motor Shaft Power Meter Based On Phase Detection Using Improved All Phase FFTGERALD ELIAS MASS MENDEZNo ratings yet
- Design of A Novel Double-Stator Fault-Tolerant Transverse Flux Permanent Magnet Machine For Electric Propulsion AircraftDocument6 pagesDesign of A Novel Double-Stator Fault-Tolerant Transverse Flux Permanent Magnet Machine For Electric Propulsion AircraftZaixin SongNo ratings yet
- Effect of Arm Inductor On Harmonic Reduction in Modular Multilevel ConverterDocument6 pagesEffect of Arm Inductor On Harmonic Reduction in Modular Multilevel ConverterBHARADWAJ CHIVUKULANo ratings yet
- An Impedance-Based Structural Health Monitoring Approach For Looseness Identification in Bolted Joint StructureDocument14 pagesAn Impedance-Based Structural Health Monitoring Approach For Looseness Identification in Bolted Joint StructureMichael GavshinNo ratings yet
- Crossmark: Control Engineering PracticeDocument13 pagesCrossmark: Control Engineering PracticeLê Đức ThịnhNo ratings yet
- Ma 2021 J. Phys. Conf. Ser. 1748 052007Document6 pagesMa 2021 J. Phys. Conf. Ser. 1748 052007SPMDD1 PGCBNo ratings yet
- A Numerical Simulation of Train-Induced Unsteady Airflow in A Tunnel of Seoul SubwayDocument8 pagesA Numerical Simulation of Train-Induced Unsteady Airflow in A Tunnel of Seoul SubwayJunior AceNo ratings yet
- Hei Chuang - 2019 Quantitative Evaluation of Bolt Connection Using A Single Piezoceramic Transducer and Ultrasonic Coda Wave Energy With The Consideration of The Piezoceramic Aging EffectDocument10 pagesHei Chuang - 2019 Quantitative Evaluation of Bolt Connection Using A Single Piezoceramic Transducer and Ultrasonic Coda Wave Energy With The Consideration of The Piezoceramic Aging Effectsunxt1995No ratings yet
- Design and Analysis of A Biomimetic Wire-Driven Robot Arm: November 2011Document9 pagesDesign and Analysis of A Biomimetic Wire-Driven Robot Arm: November 2011Shubham SharmaNo ratings yet
- 5maximum Torque Per AmpereandMagnetization StateControlofaVariable FluxPermanentMagnetMachineDocument13 pages5maximum Torque Per AmpereandMagnetization StateControlofaVariable FluxPermanentMagnetMachineJacinto CanekNo ratings yet
- Mobile Charge Carrier Based Modeling of 4H21 DNTT and Structure Analysis of OTFTDocument5 pagesMobile Charge Carrier Based Modeling of 4H21 DNTT and Structure Analysis of OTFTshubham dadhichNo ratings yet
- Online Condition Monitoring of Onboard Traction Transformer Core Based On Core-Loss Calculation ModelDocument10 pagesOnline Condition Monitoring of Onboard Traction Transformer Core Based On Core-Loss Calculation ModelMuhd AriffNo ratings yet
- Position Control For Permanent Magnet Synchronous Motor Based On Neural Network and Terminal Sliding Mode ControlDocument9 pagesPosition Control For Permanent Magnet Synchronous Motor Based On Neural Network and Terminal Sliding Mode ControlLê Đức ThịnhNo ratings yet
- 1 AhmadiDocument6 pages1 Ahmadipc hosseinNo ratings yet
- Analysis of A Regenerative Braking System of BLDC Motor in Targeting Electric Vehicle ImplementationDocument5 pagesAnalysis of A Regenerative Braking System of BLDC Motor in Targeting Electric Vehicle ImplementationDEBARATI DAMNo ratings yet
- A High-Efficiency Multiple Output Flyback Converter Based On Variable Width Winding Planar MagneticsDocument7 pagesA High-Efficiency Multiple Output Flyback Converter Based On Variable Width Winding Planar MagneticsVlad AlexNo ratings yet
- Annurev Anchem 012809 102211Document25 pagesAnnurev Anchem 012809 102211Faran TAHIRNo ratings yet
- Design Procedure For A Longitudinal Flux Flat Linear Switched Reluctance MotorDocument19 pagesDesign Procedure For A Longitudinal Flux Flat Linear Switched Reluctance MotorJordiNo ratings yet
- Eddy CurrentDocument11 pagesEddy CurrentVijaya KumarNo ratings yet
- Staticform FindinganalysisofarailwaycatenaryusingadynamicequilibriummethodbasedonflexiblemultibodysystemformulationwithabsolutenodalcoordinatesandcontrolsDocument28 pagesStaticform FindinganalysisofarailwaycatenaryusingadynamicequilibriummethodbasedonflexiblemultibodysystemformulationwithabsolutenodalcoordinatesandcontrolsmustafakbNo ratings yet
- A Multi Objective PMU Placement Method Considering Measurement Redundancy and Observability Value Under ContingenciesDocument12 pagesA Multi Objective PMU Placement Method Considering Measurement Redundancy and Observability Value Under ContingenciesZeina RammalNo ratings yet
- An Approach For Determining Frequency Deviations in AGCDocument7 pagesAn Approach For Determining Frequency Deviations in AGCddpc.npcc3No ratings yet
- A Python Based Automatic Impedance Scan Tool For PSCAD Models SSCI SSTIDocument5 pagesA Python Based Automatic Impedance Scan Tool For PSCAD Models SSCI SSTImohamed berririNo ratings yet
- Contact Model For The Pantograph-CatenarDocument12 pagesContact Model For The Pantograph-Catenaramitvaishnav1No ratings yet
- Dynamic Load Testing of Bridges PDFDocument6 pagesDynamic Load Testing of Bridges PDFankurshah1986No ratings yet
- 2 PBDocument17 pages2 PBxenaman17No ratings yet
- Frequency Adaptive Selective Harmonic Control For Grid-Connected InvertersDocument13 pagesFrequency Adaptive Selective Harmonic Control For Grid-Connected InvertersHùng ĐặngNo ratings yet
- Parameter Optimization of PI Controller by PSO For Optimal Controlling of A Buck Converter's OutputDocument7 pagesParameter Optimization of PI Controller by PSO For Optimal Controlling of A Buck Converter's OutputLIEW HUI FANG UNIMAPNo ratings yet
- Determination of Operation Characteristics of A SyDocument8 pagesDetermination of Operation Characteristics of A SyhudarusliNo ratings yet
- A Five-Level Low-Cost Modular Voltage Stepped-Up Converter For Photovoltaic SystemsDocument5 pagesA Five-Level Low-Cost Modular Voltage Stepped-Up Converter For Photovoltaic SystemsZaixin SongNo ratings yet
- Secimic Response Anasysis of The Long-Span Curved BridgeDocument6 pagesSecimic Response Anasysis of The Long-Span Curved Bridgegrobardogroba1211No ratings yet
- Dutkiewicz 2019 IOP Conf. Ser. Mater. Sci. Eng. 471 052029Document10 pagesDutkiewicz 2019 IOP Conf. Ser. Mater. Sci. Eng. 471 052029Federico ZurbriggenNo ratings yet
- Comprehensive Method For Transient Modeling of Single Phase InductionDocument15 pagesComprehensive Method For Transient Modeling of Single Phase InductionvalentinmullerNo ratings yet
- A Harmonic Drive Model Considering Geometry and Internal InteractionDocument17 pagesA Harmonic Drive Model Considering Geometry and Internal Interactionnicht meherNo ratings yet
- Design and Optimization of Unified Power Flow Controller UPFC Based On IEEE 9 Bus SystemDocument4 pagesDesign and Optimization of Unified Power Flow Controller UPFC Based On IEEE 9 Bus Systemhopas88788No ratings yet
- 1 PDFDocument8 pages1 PDFAnonymous EvrtA70No ratings yet
- Vibration of Flexible Structures Under Nonlinear Boundary ConditionsDocument11 pagesVibration of Flexible Structures Under Nonlinear Boundary Conditionsmohdsolihat1No ratings yet
- Bounding Gait Control of A Parallel Quadruped Robotindustrial RobotDocument12 pagesBounding Gait Control of A Parallel Quadruped Robotindustrial RobotluukverstegenNo ratings yet
- SHM PaperDocument14 pagesSHM Paperapoorv mishraNo ratings yet
- Applsci 06 00024 PDFDocument14 pagesApplsci 06 00024 PDFJing CaoNo ratings yet
- Unified Power Flow Controller Technology and ApplicationFrom EverandUnified Power Flow Controller Technology and ApplicationRating: 4 out of 5 stars4/5 (5)
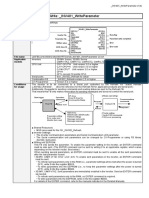
- Parameter Write: - Inv401 - Writeparameter: This FBDocument4 pagesParameter Write: - Inv401 - Writeparameter: This FBJosephNo ratings yet
- Technical English-II Nov Dec 2009 Question Paper StudyhauntersDocument5 pagesTechnical English-II Nov Dec 2009 Question Paper StudyhauntersSriram JNo ratings yet
- Whites MXT: The Detector I Use Is A Whites MXT (Or As I Call It My "Wee Noisy!")Document17 pagesWhites MXT: The Detector I Use Is A Whites MXT (Or As I Call It My "Wee Noisy!")corinne mills100% (2)
- Modulation and Multiplexing Schemes in Satellite CommunicationsDocument7 pagesModulation and Multiplexing Schemes in Satellite CommunicationsSUNILNo ratings yet
- Technicolor Tc7200Document4 pagesTechnicolor Tc7200grudva2No ratings yet
- 1.4 Power Quality ProblemsDocument2 pages1.4 Power Quality ProblemssimaarulNo ratings yet
- Bloom QuestionsDocument270 pagesBloom QuestionsrameshsmeNo ratings yet
- Chipanalog-CA-IF4820HS C2846827Document21 pagesChipanalog-CA-IF4820HS C2846827Mudassar RafiqNo ratings yet
- Brushless DC MotorsDocument21 pagesBrushless DC MotorsKiran KumarNo ratings yet
- Rancang Bangun Prototipe Sistem Kendali Iron Removal Filter (Irf) Pada Unit Pengolahan Air Bersih Berbasis PLCDocument8 pagesRancang Bangun Prototipe Sistem Kendali Iron Removal Filter (Irf) Pada Unit Pengolahan Air Bersih Berbasis PLCaulyaakmala24No ratings yet
- Aftron - Split AC Unit SpecDocument2 pagesAftron - Split AC Unit Specjhay rarezaNo ratings yet
- European Catalog Direct Operated Solenoid Valves Series 126 Asco en 7029040Document6 pagesEuropean Catalog Direct Operated Solenoid Valves Series 126 Asco en 7029040Yasser Al NasrNo ratings yet
- STARTING - CHARGING - Ford Cutaway E350 Super Duty 2005 - SYSTEM WIRING DIAGRAMSDocument8 pagesSTARTING - CHARGING - Ford Cutaway E350 Super Duty 2005 - SYSTEM WIRING DIAGRAMSEfra HollowNo ratings yet
- Final Drawing-R5D2013Document79 pagesFinal Drawing-R5D2013batizap batizapNo ratings yet
- Datasheet 16F887Document288 pagesDatasheet 16F887thienhoang156No ratings yet
- Catalogs C450D5 ChinaDocument2 pagesCatalogs C450D5 ChinaKhoilnNo ratings yet
- KRF-V4080D KRF-V5580D: Instruction ManualDocument36 pagesKRF-V4080D KRF-V5580D: Instruction ManualCostin DraghiaNo ratings yet
- RTL Verilog Navabi PDFDocument294 pagesRTL Verilog Navabi PDFSiva chowdaryNo ratings yet
- Aire Acondicionado ASY12FSBCWDocument2 pagesAire Acondicionado ASY12FSBCWJano NymusNo ratings yet
- Manual Sivacon 8ps Planning With Sivacon 8ps en-GBDocument296 pagesManual Sivacon 8ps Planning With Sivacon 8ps en-GBAbez Five100% (1)
- Intermediate FrequencyDocument2 pagesIntermediate FrequencySharif ShahadatNo ratings yet
- Moscap5mar 2020Document2 pagesMoscap5mar 2020Omkar KatkarNo ratings yet
- Bally GameMaker Setup PDFDocument40 pagesBally GameMaker Setup PDFAlex PugachNo ratings yet
- Irodov - Problems in Atomic and Nuclear PhysicsDocument132 pagesIrodov - Problems in Atomic and Nuclear Physicsyomanshivi100% (2)
- 1 IEEE 4 Node Test Feeder 01-01-2014: Load Flow AnalysisDocument12 pages1 IEEE 4 Node Test Feeder 01-01-2014: Load Flow AnalysisSatrio WibowoNo ratings yet
- ESYS50-lab4e-sg Oscilloscope Gerardo SanchezDocument6 pagesESYS50-lab4e-sg Oscilloscope Gerardo SanchezGerardo SanchezNo ratings yet
- WPT 2 e 33Document4 pagesWPT 2 e 33Julio Juarez RodriguezNo ratings yet
- TQP3M9009: ApplicationsDocument11 pagesTQP3M9009: ApplicationsusbideNo ratings yet
- Lesson 3 - FiltersDocument29 pagesLesson 3 - FiltersRennel MallariNo ratings yet
- Teco Ma7200 2 PDFDocument209 pagesTeco Ma7200 2 PDFDung LeNo ratings yet