You might also like
- DEN408 - DEMM011 Course Info - 2013Document2 pagesDEN408 - DEMM011 Course Info - 2013MadsonNo ratings yet
- MATH-101 - Calculus Analytical Geometry (OBE) Fall 2018Document5 pagesMATH-101 - Calculus Analytical Geometry (OBE) Fall 2018Usama KhurshidNo ratings yet
- Computer Science 10th Class Chapter 01 Short Questions AnswersDocument7 pagesComputer Science 10th Class Chapter 01 Short Questions AnswersHamza Niaz100% (3)
- ASB-410 JQL in Jira Service Desk Slides and NotesDocument198 pagesASB-410 JQL in Jira Service Desk Slides and NotesCarlos GarciaNo ratings yet
- MCT-351 Introduction To Robotics Course OutlineDocument3 pagesMCT-351 Introduction To Robotics Course OutlineMuhammad Ali Junaid KhanNo ratings yet
- Course Outline-EE360 Control Systems Spring 2020Document5 pagesCourse Outline-EE360 Control Systems Spring 2020Shoaib MughalNo ratings yet
- EE 3002-Junior Design Studio-RoboticsDocument3 pagesEE 3002-Junior Design Studio-RoboticsNawaal SiddiqueNo ratings yet
- B.E. Nano Technology Updated On 21.09.2017 Syla 6Document70 pagesB.E. Nano Technology Updated On 21.09.2017 Syla 6sayaliNo ratings yet
- Syallbus of Specialization in Robotics and Machine LearningDocument24 pagesSyallbus of Specialization in Robotics and Machine LearningHardial SinghNo ratings yet
- EE 340 Control Systems: Schedule Course Type, SemesterDocument5 pagesEE 340 Control Systems: Schedule Course Type, SemesterArbab HaiderNo ratings yet
- Final Lesson Plan Cs TheoryDocument16 pagesFinal Lesson Plan Cs TheoryKrushnasamy SuramaniyanNo ratings yet
- Engineering Statics: Department of Mechanical EngineeringDocument2 pagesEngineering Statics: Department of Mechanical EngineeringMohsin RashidNo ratings yet
- CS-475 - Computer VisionDocument5 pagesCS-475 - Computer VisionSkiwordy MediaNo ratings yet
- Control System (Lab)Document6 pagesControl System (Lab)ayesha amjadNo ratings yet
- Linear Control Systems Course OutlineDocument3 pagesLinear Control Systems Course Outlinekiller raoNo ratings yet
- 641 D 526409739 DSPLab OutlineDocument4 pages641 D 526409739 DSPLab OutlineTayyaba ParveenNo ratings yet
- EEM343-Robotics Week1 1 PDFDocument33 pagesEEM343-Robotics Week1 1 PDFShobanraj LetchumananNo ratings yet
- TomDocument5 pagesTomMuhammad DuraidNo ratings yet
- ME762 Course PlanDocument3 pagesME762 Course PlanLekha PylaNo ratings yet
- V - 14linear Control SystemsDocument5 pagesV - 14linear Control SystemsMirza AhsanNo ratings yet
- Fundamendals of Robotics SyllabusDocument2 pagesFundamendals of Robotics SyllabuskloirywbdNo ratings yet
- Introduction To Robotics, Class Notes (UG Level) : June 2015Document19 pagesIntroduction To Robotics, Class Notes (UG Level) : June 2015Gayathri R HICET CSE STAFFNo ratings yet
- Modeling and SimulationDocument29 pagesModeling and SimulationMuhammad Hammad Javed IqbalNo ratings yet
- Digital Communication SystemsDocument4 pagesDigital Communication SystemsMarina KhanNo ratings yet
- Robotics R19 Iv Year Sem-IDocument3 pagesRobotics R19 Iv Year Sem-IShubham SomwanshiNo ratings yet
- DSP Course Outline NewDocument3 pagesDSP Course Outline Newsohaib hashmatNo ratings yet
- Robotics Notes 1Document19 pagesRobotics Notes 1MahimaNo ratings yet
- Robotics Notes 1Document19 pagesRobotics Notes 1Dammalapati HarshavardhanNo ratings yet
- Robotics Notes 1Document19 pagesRobotics Notes 1Nandyala ManasaNo ratings yet
- SN ADocument4 pagesSN AMuhammad DuraidNo ratings yet
- MEE70111 Robotics 3+1: University of Mumbai, Mechanical Engineering (Third and Final Year) Revised Course (Rev-2012)Document2 pagesMEE70111 Robotics 3+1: University of Mumbai, Mechanical Engineering (Third and Final Year) Revised Course (Rev-2012)JIPSON GEORGENo ratings yet
- Robotics Notes 1Document19 pagesRobotics Notes 1melady teraNo ratings yet
- SAS Lab Manual For 17-18Document76 pagesSAS Lab Manual For 17-18Amir QureshiNo ratings yet
- Form 1 Course OutlineDocument5 pagesForm 1 Course OutlineMuhammad SumeetNo ratings yet
- 2 RaisyllDocument75 pages2 RaisyllPadiyappa KoogatiNo ratings yet
- Course Outline Document Spring 2022Document6 pagesCourse Outline Document Spring 2022Muhammad DanishNo ratings yet
- April 2016 Curriculum Syllabus Robotics M.tech 2015 16Document54 pagesApril 2016 Curriculum Syllabus Robotics M.tech 2015 16Vignesh SaminathanNo ratings yet
- Course Learning Outcomes With Taxonomy Levels: S. No CLO Statement Domain Taxonomy Level PLO DefineDocument2 pagesCourse Learning Outcomes With Taxonomy Levels: S. No CLO Statement Domain Taxonomy Level PLO DefineAbdul QadirNo ratings yet
- EE-371 Linear Control Systems First Day HandoutDocument4 pagesEE-371 Linear Control Systems First Day HandoutMaham AslamNo ratings yet
- Power System Analysis-W21Document4 pagesPower System Analysis-W21Ahad MunawarNo ratings yet
- Modulhandbuch MA MERO WiSe 2021 22Document28 pagesModulhandbuch MA MERO WiSe 2021 22vishwasshadagopanbharadwajNo ratings yet
- EC368 RoboticsDocument3 pagesEC368 RoboticsBonifus Parambaloth LeenusNo ratings yet
- EC368 RoboticsDocument3 pagesEC368 RoboticsHello123No ratings yet
- EC368 RoboticsDocument3 pagesEC368 RoboticsKrishnakumar KattarakunnuNo ratings yet
- RoboticsDocument2 pagesRoboticsRaghav goelNo ratings yet
- CDM ME 464 Robotics and Automation-2022Document17 pagesCDM ME 464 Robotics and Automation-2022Tony K PaulNo ratings yet
- 2 ArsyllDocument80 pages2 ArsyllPremchand V. P.No ratings yet
- EE561 OBEcourseoutline 2019 20Document4 pagesEE561 OBEcourseoutline 2019 20talha manzoorNo ratings yet
- BME Course OutlineDocument3 pagesBME Course OutlineAbdulSamadNo ratings yet
- DSP Course Outline NewDocument3 pagesDSP Course Outline Newsohaib hashmatNo ratings yet
- Course OutlineDocument3 pagesCourse OutlineJawwad AhmedNo ratings yet
- Course File 2016-2017Document16 pagesCourse File 2016-2017sirajudeen INo ratings yet
- Computational Engineering Mechanics TH and LabDocument6 pagesComputational Engineering Mechanics TH and LabJitendra JoshiNo ratings yet
- Signals and SystemDocument4 pagesSignals and SystemAman GuptaNo ratings yet
- UntitledDocument4 pagesUntitledAB 26No ratings yet
- ECE-2019-23-SYLLABUS III Year I SemesterDocument22 pagesECE-2019-23-SYLLABUS III Year I SemesterNani SaiNo ratings yet
- EE 220: Signals and Systems: S Sirfanhussain @uet - Edu.pk Naveed@uet - Edu.pkDocument2 pagesEE 220: Signals and Systems: S Sirfanhussain @uet - Edu.pk Naveed@uet - Edu.pkAli HassanNo ratings yet
- MEX6271 Assignment 1Document4 pagesMEX6271 Assignment 1SheraNo ratings yet
- Fall 2023, DSA OutlineDocument5 pagesFall 2023, DSA OutlinehassaniftikharlapiNo ratings yet
- LEC 01 - Mechatronics Systems and ApplicationsDocument14 pagesLEC 01 - Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- Neural Network Systems Techniques and Applications: Advances in Theory and ApplicationsFrom EverandNeural Network Systems Techniques and Applications: Advances in Theory and ApplicationsNo ratings yet
- Advancements in Robotics and Automation From Theory to PracticeFrom EverandAdvancements in Robotics and Automation From Theory to PracticeNo ratings yet
- Modeling The Environment - Outline (Jan 15)Document9 pagesModeling The Environment - Outline (Jan 15)talha manzoorNo ratings yet
- EE5612 OBEcourseoutlineDocument4 pagesEE5612 OBEcourseoutlinetalha manzoorNo ratings yet
- EE561 OBEcourseoutline 2019 20Document4 pagesEE561 OBEcourseoutline 2019 20talha manzoorNo ratings yet
- EE200 - Sophomore Design StudioDocument3 pagesEE200 - Sophomore Design Studiotalha manzoorNo ratings yet
- Graduate Programs: LUMS School of Science and EngineeringDocument33 pagesGraduate Programs: LUMS School of Science and Engineeringtalha manzoorNo ratings yet
- Implementation of Simultaneous Localization and Mapping On PeoplebotDocument108 pagesImplementation of Simultaneous Localization and Mapping On Peoplebottalha manzoorNo ratings yet
- Introduction To Fluid Mechanics - TocDocument3 pagesIntroduction To Fluid Mechanics - TocNguyễn Hồng Quân100% (2)
- Chapter2 Sampling Simple Random SamplingDocument24 pagesChapter2 Sampling Simple Random SamplingDr Swati RajNo ratings yet
- Adaptive Control Design and AnalysisDocument45 pagesAdaptive Control Design and Analysishind90No ratings yet
- Analog To DigitalDocument46 pagesAnalog To DigitalSaleem HaddadNo ratings yet
- Unit 4 - Lesson 2Document3 pagesUnit 4 - Lesson 2api-243891235No ratings yet
- The Mechanism of Activated Digusion Through Silica GlassDocument9 pagesThe Mechanism of Activated Digusion Through Silica GlassElenaNo ratings yet
- Chapter 3 (Laplace Transform)Document14 pagesChapter 3 (Laplace Transform)EmmanuelNo ratings yet
- Calculus PDF Notes 156pages59Document13 pagesCalculus PDF Notes 156pages59Pardeep Singh100% (1)
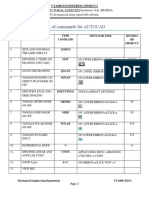
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 pagesList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelNo ratings yet
- Gate Best QuestionsDocument17 pagesGate Best QuestionsAnmolKumarNo ratings yet
- Summer Vacation Task HSD-2020-21 Viii & XDocument5 pagesSummer Vacation Task HSD-2020-21 Viii & XHimansu dasNo ratings yet
- Probst at Reviewer 30Document3 pagesProbst at Reviewer 30Mysti Metin MesinaNo ratings yet
- Central Force Problem: Reduction of Two Body ProblemDocument7 pagesCentral Force Problem: Reduction of Two Body ProblemParasIvlnNo ratings yet
- Jaime Sandoval Real EstateDocument3 pagesJaime Sandoval Real EstateJaime R. SandovalNo ratings yet
- Descriptive STatistics For Qualitative DataDocument34 pagesDescriptive STatistics For Qualitative DataMwanjala GasambiNo ratings yet
- Topic 68 Stress Testing and Other Risk Management ToolsDocument4 pagesTopic 68 Stress Testing and Other Risk Management ToolsSoumava PalNo ratings yet
- Research Process, Phases and 10 Step ModelDocument5 pagesResearch Process, Phases and 10 Step ModelJ.B ChoNo ratings yet
- How Many Interviews Are Enough - On Data SaturationDocument25 pagesHow Many Interviews Are Enough - On Data SaturationpanderetitaestudiaNo ratings yet
- EnergyPendulum Gizmo 2Document6 pagesEnergyPendulum Gizmo 2Delia SmithNo ratings yet
- AgglomerationDocument16 pagesAgglomerationMusanje MartinNo ratings yet
- TSB 89 ADocument29 pagesTSB 89 AŽarko MočnikNo ratings yet
- 6.6 Notes - Trapezoids and KitesDocument12 pages6.6 Notes - Trapezoids and KitesAbrar DirdasawiNo ratings yet
- Notes On Algbra G ChrystalDocument31 pagesNotes On Algbra G ChrystalstreetbaNo ratings yet
- The Progress of Consolidation in A Clay Layer Increasing-Gibson PDFDocument12 pagesThe Progress of Consolidation in A Clay Layer Increasing-Gibson PDFAnonymous GnfGTwNo ratings yet
- CDMA Simulation: Alison Hightman Elaine Chung Alejandra GalvanDocument30 pagesCDMA Simulation: Alison Hightman Elaine Chung Alejandra GalvanericnaneNo ratings yet
- Eu 2Document15 pagesEu 2Ayush BhadauriaNo ratings yet
- Quay Walls DesignDocument12 pagesQuay Walls DesignAdrian Frantescu100% (1)
- Math 6 DLP 1 - Giving Meaning of Exponent and Base Giving The Value of Numbers Involving Exponent PDFDocument9 pagesMath 6 DLP 1 - Giving Meaning of Exponent and Base Giving The Value of Numbers Involving Exponent PDFZyreen Joy ServanesNo ratings yet