You might also like
- Technology CAD For VLSI Design: Anindya Sundar DharDocument23 pagesTechnology CAD For VLSI Design: Anindya Sundar DharThi NguyenNo ratings yet
- UNIT - 4 and UNIT - 5 (PN Sequence Generator) Digital Communication 2021 21.03.2021Document62 pagesUNIT - 4 and UNIT - 5 (PN Sequence Generator) Digital Communication 2021 21.03.2021Revathy SNo ratings yet
- Error Correction and LDPC DecodingDocument44 pagesError Correction and LDPC DecodingghionoiucNo ratings yet
- Solution of Homework#02: Is Ten's Complement of BDocument2 pagesSolution of Homework#02: Is Ten's Complement of BApoorva KaradiNo ratings yet
- Instrumentacion ModularDocument13 pagesInstrumentacion ModularJose Tinajero M.No ratings yet
- Chapter 3Document79 pagesChapter 3pdvdmNo ratings yet
- Network Introduction - 1Document78 pagesNetwork Introduction - 1kusumNo ratings yet
- Introduction To Telecommunication: Chris RoeloffzenDocument23 pagesIntroduction To Telecommunication: Chris Roeloffzenuma_maduraiNo ratings yet
- Schneider - Ch04 - Inv To CS 8eDocument61 pagesSchneider - Ch04 - Inv To CS 8eTwinky CasidsidNo ratings yet
- Data CommunicationsDocument94 pagesData Communicationsmyatheinkhant119No ratings yet
- 2002 07 Model ParametersDocument31 pages2002 07 Model ParametersNicolas Andres Aceituno ReyesNo ratings yet
- Ti Sns50-Hba0-S01 1034097Document8 pagesTi Sns50-Hba0-S01 1034097zaleksNo ratings yet
- r17 STLD NotesDocument118 pagesr17 STLD NotesJNRNo ratings yet
- PCM Quantization and EncodingDocument21 pagesPCM Quantization and EncodingAhlaa SafiNo ratings yet
- Sound Multiplex Demodulator IC For TV in The North American MarketDocument11 pagesSound Multiplex Demodulator IC For TV in The North American Marketjosenicolas12000No ratings yet
- Agenda: Introduction To Telecom Network Introduction To Digital SPC SwitchDocument73 pagesAgenda: Introduction To Telecom Network Introduction To Digital SPC Switcha_krivushaNo ratings yet
- Digital Communication (EC 691) Lab Manual Protected PDFDocument62 pagesDigital Communication (EC 691) Lab Manual Protected PDFPoulami RoyNo ratings yet
- Control Systems Laboratory: Hamza OSAMA &haider Jamal&salah MahdiDocument27 pagesControl Systems Laboratory: Hamza OSAMA &haider Jamal&salah MahdiAhmed Mohammed khalfNo ratings yet
- Summary of PCM SystemsDocument35 pagesSummary of PCM Systemsrafey111No ratings yet
- Error Detection and CorrectionDocument16 pagesError Detection and Correctionshesh_07No ratings yet
- Link Budget WCDMA UsableDocument8 pagesLink Budget WCDMA UsableEfosa AigbeNo ratings yet
- 03 - Data Representation (Question)Document2 pages03 - Data Representation (Question)vlnNo ratings yet
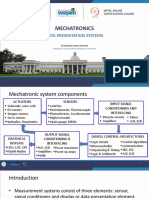
- 15 - Data Presentation System - NewDocument35 pages15 - Data Presentation System - NewKARTHIK S SNo ratings yet
- Least Mean Square Calibration Method For VCO Non-Linearity: Hariprasath Venkatram, Rajesh Inti and Un-Ku MoonDocument4 pagesLeast Mean Square Calibration Method For VCO Non-Linearity: Hariprasath Venkatram, Rajesh Inti and Un-Ku Moonwrite2rammyNo ratings yet
- Ee1001 01 PDFDocument38 pagesEe1001 01 PDFMuhammad HaseebNo ratings yet
- Simplified Analogue Realization of The Digital Direct Synthesis (DDS) Technique For Signal GenerationDocument5 pagesSimplified Analogue Realization of The Digital Direct Synthesis (DDS) Technique For Signal GenerationInternational Organization of Scientific Research (IOSR)No ratings yet
- Speech and Audio Signals: 10.2.1 Quantization ErrorDocument14 pagesSpeech and Audio Signals: 10.2.1 Quantization ErrorLaxman KoiralaNo ratings yet
- Intoroduction of Digital SystemsDocument36 pagesIntoroduction of Digital SystemsIlaiyaveni IyanduraiNo ratings yet
- dynamic-vs-4-20-ma-accelerometersDocument5 pagesdynamic-vs-4-20-ma-accelerometersalexmantilla80No ratings yet
- ESC 201A ExpDocument9 pagesESC 201A Expanshikamittal2626No ratings yet
- Data Acquisition and Interfacing: An Introduction to Components, Systems, and SoftwareDocument47 pagesData Acquisition and Interfacing: An Introduction to Components, Systems, and Softwareladybuzz89No ratings yet
- Convolution Codes: 1.0 PrologueDocument26 pagesConvolution Codes: 1.0 PrologueKulwant NagiNo ratings yet
- Digital Communications (I) LAB No. 3 Pulse Code Modulation (PCM)Document5 pagesDigital Communications (I) LAB No. 3 Pulse Code Modulation (PCM)moeena jamalNo ratings yet
- FALLSEM2022-23 ECE4001 ETH VL2022230102368 Reference Material I 02-08-2022 Module - 2Document13 pagesFALLSEM2022-23 ECE4001 ETH VL2022230102368 Reference Material I 02-08-2022 Module - 2RISHABH PANDEYNo ratings yet
- Basic PLCDocument34 pagesBasic PLCESHA VARSHNEYNo ratings yet
- CS34 Digital Principles and System DesignDocument107 pagesCS34 Digital Principles and System DesignSara PatrickNo ratings yet
- Digital Communication Lab Manual ExperimentsDocument50 pagesDigital Communication Lab Manual ExperimentsAniket BhowmikNo ratings yet
- Channel Coding For Modern Communication SystemsDocument4 pagesChannel Coding For Modern Communication SystemsMaryamNo ratings yet
- DV Cam FormatDocument97 pagesDV Cam FormatLaurentiu IacobNo ratings yet
- Digital Integrated Circuits: Traian Tulbure NII13Document55 pagesDigital Integrated Circuits: Traian Tulbure NII13boymatterNo ratings yet
- Coding IntroDocument21 pagesCoding IntroEzhil Azhahi.AM Assistant ProfessorNo ratings yet
- Blind Signal Analysis of an Optus D1 Satellite DownlinkDocument68 pagesBlind Signal Analysis of an Optus D1 Satellite DownlinkkidusNo ratings yet
- Chapter 4 PeripheralsDocument2 pagesChapter 4 PeripheralsPedro Ivo Alves FonsecaNo ratings yet
- Group 6Document19 pagesGroup 6uttiyo ranaNo ratings yet
- 1 (6 Fec) PDFDocument17 pages1 (6 Fec) PDFTung NguyenNo ratings yet
- 07 Communications - GQB (Ddpanda)Document43 pages07 Communications - GQB (Ddpanda)asdsadasNo ratings yet
- ECC Techniques for Reliable Wireless SystemsDocument7 pagesECC Techniques for Reliable Wireless SystemsSuman SahNo ratings yet
- SInCOS EncoderDocument6 pagesSInCOS EncoderbozzecNo ratings yet
- Digital-to-Analog Converter Subsystem: Team Johnny BravoDocument16 pagesDigital-to-Analog Converter Subsystem: Team Johnny BravoGonghao SunNo ratings yet
- ST Micro Interview Questions For Circuit DesignDocument10 pagesST Micro Interview Questions For Circuit DesignvenegallaraghuNo ratings yet
- Information Theory and CodingDocument7 pagesInformation Theory and CodingGaurav DeepakNo ratings yet
- Digital Electronics SPH 323Document153 pagesDigital Electronics SPH 323Phelix Ouma OdhiamboNo ratings yet
- 3G Report Per RNC - 20201008093232Document97 pages3G Report Per RNC - 20201008093232Lake GebrekidanNo ratings yet
- Digital Communication Systems DesignDocument37 pagesDigital Communication Systems DesignShelNo ratings yet
- 01 - Basic Electrical CalculationsDocument17 pages01 - Basic Electrical CalculationsRagesh JoshiNo ratings yet
- 01 - Basic Electrical CalculationsDocument17 pages01 - Basic Electrical Calculationsayah_ainaNo ratings yet
- Basic Digital Signal Processing: Butterworths Basic SeriesFrom EverandBasic Digital Signal Processing: Butterworths Basic SeriesRating: 5 out of 5 stars5/5 (1)
- Digital Mobile Communications and the TETRA SystemFrom EverandDigital Mobile Communications and the TETRA SystemRating: 5 out of 5 stars5/5 (1)
- Communication Services via Satellite: A Handbook for Design, Installation and Service EngineersFrom EverandCommunication Services via Satellite: A Handbook for Design, Installation and Service EngineersNo ratings yet
- Databases and Database Users: Slide 1-1Document37 pagesDatabases and Database Users: Slide 1-1HasanNo ratings yet
- Cryptography and Network Security: Seventh Edition, Global Edition by William StallingsDocument34 pagesCryptography and Network Security: Seventh Edition, Global Edition by William StallingsHasanNo ratings yet
- Seventh Edition, Global Edition by William StallingsDocument42 pagesSeventh Edition, Global Edition by William StallingsHasanNo ratings yet
- Seventh Edition, Global Edition by William StallingsDocument41 pagesSeventh Edition, Global Edition by William StallingsHasanNo ratings yet
- Basics of Functional Dependencies and Normalization For Relational DatabasesDocument60 pagesBasics of Functional Dependencies and Normalization For Relational DatabasesHasanNo ratings yet
- ch01-SLIDE - (2) Data Communications and Networking by Behrouz A.ForouzanDocument18 pagesch01-SLIDE - (2) Data Communications and Networking by Behrouz A.ForouzanXP2009100% (2)
- Chapter 02Document53 pagesChapter 02Bicycle ThiefNo ratings yet
- Relational Database Design by ER-and EERR-to-Relational MappingDocument37 pagesRelational Database Design by ER-and EERR-to-Relational MappingHasanNo ratings yet
- Data Modeling Using The Entity-Relationship (ER) Model: Slide 1-1Document61 pagesData Modeling Using The Entity-Relationship (ER) Model: Slide 1-1HasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument25 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument33 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument17 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications QoS SupportDocument45 pagesData and Computer Communications QoS SupportHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument40 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument29 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument45 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Error Detection and CorrectionDocument73 pagesError Detection and CorrectionJagannath AcharyaNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument31 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument30 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument38 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument50 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument46 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument41 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument42 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications MultiplexingDocument41 pagesData and Computer Communications MultiplexingHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument23 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument41 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- Data Encoding Techniques ExplainedDocument56 pagesData Encoding Techniques ExplainedHasanNo ratings yet
- CH 03 - DCC10eDocument47 pagesCH 03 - DCC10eHasanNo ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument51 pagesData and Computer Communications: Tenth Edition by William StallingsHasanNo ratings yet
- BGP Short Note FileDocument60 pagesBGP Short Note FileTabarez AhmedNo ratings yet
- MA5633 V800R017C00 Product Description D3.0 CMCDocument11 pagesMA5633 V800R017C00 Product Description D3.0 CMCauancasaNo ratings yet
- DS2460Q DatasheetDocument5 pagesDS2460Q Datasheetblado1No ratings yet
- Adva FSP 150CC-GE201 Data SheetDocument2 pagesAdva FSP 150CC-GE201 Data SheetMark LamondNo ratings yet
- Byrne, John: Advanced Signaling & Media Management - TelcobridgesDocument3 pagesByrne, John: Advanced Signaling & Media Management - TelcobridgesmsantacruzrNo ratings yet
- HTTP CatsDocument34 pagesHTTP CatsrandyNo ratings yet
- Smart Home Controlled Using Google AssistantDocument13 pagesSmart Home Controlled Using Google AssistantRachana ChouguleNo ratings yet
- 1Z0-932 Demo SampleDocument13 pages1Z0-932 Demo SampleNarsimuluAkulaNo ratings yet
- RP-200519 RAN1 SR RAN#88eDocument22 pagesRP-200519 RAN1 SR RAN#88ePraveen KumarNo ratings yet
- Unit 2 Task 12 Advances in TechnologyDocument1 pageUnit 2 Task 12 Advances in TechnologycarmenNo ratings yet
- AC701 Ethernet Design Creation: November 2014Document46 pagesAC701 Ethernet Design Creation: November 2014Buddhi DhammaNo ratings yet
- DC Streetcar Emails 4Document147 pagesDC Streetcar Emails 4MotherboardTVNo ratings yet
- Security Analysis As Software-Defined Security For SDN EnvironmentDocument6 pagesSecurity Analysis As Software-Defined Security For SDN EnvironmentForloopNo ratings yet
- Profile FormatDocument4 pagesProfile Formatroosevelt04No ratings yet
- Introduction Introduction: M M 1000 CVD (Chemical Vapour Deposition)Document7 pagesIntroduction Introduction: M M 1000 CVD (Chemical Vapour Deposition)Dhani Wahyuningtias HafshaNo ratings yet
- RP VP WV500 DTDocument1 pageRP VP WV500 DTapi-3736776No ratings yet
- Cloud Computing: BITS PilaniDocument8 pagesCloud Computing: BITS Pilanisharan kommiNo ratings yet
- ED-136 Operational and Technical Requirements PDFDocument112 pagesED-136 Operational and Technical Requirements PDFTran DuyNo ratings yet
- Shedding Light On The Dark Corners of The Internet: A Survey of Tor ResearchDocument34 pagesShedding Light On The Dark Corners of The Internet: A Survey of Tor ResearchSaadNo ratings yet
- 5 - Wireless TechnologiesDocument100 pages5 - Wireless TechnologiesSadrina MahamudNo ratings yet
- Deploying Arcgis Enterprise in Microsoft AzureDocument43 pagesDeploying Arcgis Enterprise in Microsoft Azurecristian080989No ratings yet
- Setup For UniFi - MikroTik Support MalaysiaDocument25 pagesSetup For UniFi - MikroTik Support Malaysiahangtuah79No ratings yet
- 802.11ah 2Document26 pages802.11ah 2StJack123No ratings yet
- LabSIM Network+ Guide To Networks 5th - 6thDocument2 pagesLabSIM Network+ Guide To Networks 5th - 6thCynthia Indah FebriyantiNo ratings yet
- Selection and Ordering Data: V, 4 X I) I I I IDocument4 pagesSelection and Ordering Data: V, 4 X I) I I I ITuan Dang AnhNo ratings yet
- Video & Voice Over IP Communications - A SIP-based Example: Barry AndrewsDocument23 pagesVideo & Voice Over IP Communications - A SIP-based Example: Barry AndrewsTejpal SinghNo ratings yet
- UAV Relay in VANETs Against Smart Jamming With Reinforcement LearningDocument11 pagesUAV Relay in VANETs Against Smart Jamming With Reinforcement LearningBerkay BulutNo ratings yet
- The Bits and Bytes of Computer NetworkingDocument55 pagesThe Bits and Bytes of Computer NetworkingAravind Dhananjeyan83% (6)
- GPS Tracker Parameter Editor V1.39 For VT310Document5 pagesGPS Tracker Parameter Editor V1.39 For VT310Armando PérezNo ratings yet
- Predator ManualDocument225 pagesPredator ManualMwaura KangetheNo ratings yet