You might also like
- Rolls Royce Avon 1534Document130 pagesRolls Royce Avon 1534Farhan71% (7)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Dire-Dawa University Dire-Dawa Institute of Technology: Department of Mechanical and Industrial EngineeringDocument13 pagesDire-Dawa University Dire-Dawa Institute of Technology: Department of Mechanical and Industrial Engineeringluter alexNo ratings yet
- Induction Motor ExercisesDocument2 pagesInduction Motor ExercisesOscar Ardila67% (3)
- FireSmarts 90min AutoSPRINK FS Obstruction Rules Slides PDFDocument95 pagesFireSmarts 90min AutoSPRINK FS Obstruction Rules Slides PDFrashid100% (1)
- Asenkron - Makineler 9. HAFTADocument49 pagesAsenkron - Makineler 9. HAFTAİldem SemaNo ratings yet
- Date: Expt. No: 12 Name of The Experiment: Measurement of Circuit Parameters of Single Phase Induction Motor and Determination ofDocument4 pagesDate: Expt. No: 12 Name of The Experiment: Measurement of Circuit Parameters of Single Phase Induction Motor and Determination of23 - 017 - Md. Imran HossainNo ratings yet
- Induction MotorDocument65 pagesInduction MotorAhmad Nawawi Ngah100% (1)
- Frictional ClutchDocument44 pagesFrictional ClutchSandip KulkarniNo ratings yet
- Formelsammlung KlausurDocument1 pageFormelsammlung KlausurlotfifakhrredineNo ratings yet
- Shankar ErrataDocument3 pagesShankar ErrataJuan CapellaNo ratings yet
- Torque - Slip Characteristic of A Three - Phase Induction MachineDocument28 pagesTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirNo ratings yet
- DC Group 3Document4 pagesDC Group 3Linda Fondo100% (1)
- Induction MotorDocument5 pagesInduction MotorkamejayNo ratings yet
- Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalDocument14 pagesDr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalVenomNo ratings yet
- Induction Motors Part 2 AC-DC MachineriesDocument7 pagesInduction Motors Part 2 AC-DC MachineriesAl Neo Pacino100% (1)
- Part 24Document5 pagesPart 24Kerlos SaeedNo ratings yet
- EE 42/43/100 Introduction To Digital Electronics: Review of Ch. 4-7.3 7/19/13Document43 pagesEE 42/43/100 Introduction To Digital Electronics: Review of Ch. 4-7.3 7/19/13ozanistzNo ratings yet
- Assignment #5 EmdDocument7 pagesAssignment #5 EmdAL RIZWANNo ratings yet
- Chapter 5 - Induction MotorDocument26 pagesChapter 5 - Induction MotorarifulNo ratings yet
- Compensation Design From LinearDocument39 pagesCompensation Design From LinearTrung Nguyen ChiNo ratings yet
- 02 Engineering PDFDocument32 pages02 Engineering PDFRizwan RathorNo ratings yet
- Answer 2:, 866.025 V Develops 2coltp, Power. Factor 0.75 Loginjo EfficanyDocument7 pagesAnswer 2:, 866.025 V Develops 2coltp, Power. Factor 0.75 Loginjo Efficanyhaseeb ahmedNo ratings yet
- 5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsDocument6 pages5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsJOHN MINKHANTNo ratings yet
- Boise State University Department of Electrical and Computer Engineering ECE 225 Circuit Analysis and Design Spring 2010Document6 pagesBoise State University Department of Electrical and Computer Engineering ECE 225 Circuit Analysis and Design Spring 2010Matthew DolanNo ratings yet
- Robert Laskowski - Spin-Orbit Coupling and Non-Collinear Magnetism in Wien2kDocument39 pagesRobert Laskowski - Spin-Orbit Coupling and Non-Collinear Magnetism in Wien2kPo48HSDNo ratings yet
- Wein Bridge Oscillators PresentationDocument15 pagesWein Bridge Oscillators PresentationHarish KumarNo ratings yet
- P.R. Gray, "Analysis and Design of Analog Integrated Circuits", 4.3.5, 6.2 6.3Document70 pagesP.R. Gray, "Analysis and Design of Analog Integrated Circuits", 4.3.5, 6.2 6.3Yeu academiaNo ratings yet
- BookkkkDocument207 pagesBookkkkNadin NirvanaNo ratings yet
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- ECE 550 Lecture Notes 1Document181 pagesECE 550 Lecture Notes 1haroutuonNo ratings yet
- HW2 SDocument5 pagesHW2 S엄기웅No ratings yet
- Potential EnergyDocument10 pagesPotential Energyjohn soniNo ratings yet
- Sliding Mode Control of Rotary Inverted PendulumDocument5 pagesSliding Mode Control of Rotary Inverted Pendulumlaila AZZOUZINo ratings yet
- Chuong 3 - Dieu Khien Toc Do Dong Co KDBDocument55 pagesChuong 3 - Dieu Khien Toc Do Dong Co KDBThiên HảiNo ratings yet
- Induction Machines - Asynchronous MachinesDocument43 pagesInduction Machines - Asynchronous MachinesMustafa ÖzdemirNo ratings yet
- Nyquist I Bode ZadaciDocument29 pagesNyquist I Bode ZadaciNikola HardiNo ratings yet
- Exam3 Solution Sum06Document5 pagesExam3 Solution Sum06wenwenNo ratings yet
- Full Test-1Document10 pagesFull Test-1Doctor StrangeNo ratings yet
- Assignment 1, Solution: Dept. of Electrical & Electronic Engineering (EEE)Document3 pagesAssignment 1, Solution: Dept. of Electrical & Electronic Engineering (EEE)mahmudulNo ratings yet
- Op Amp Applications2Document26 pagesOp Amp Applications2Debashish PalNo ratings yet
- Addis Ababa University (CNCS) : Department of Physics Electromagnetic Theory (Phys 602)Document10 pagesAddis Ababa University (CNCS) : Department of Physics Electromagnetic Theory (Phys 602)ShinieSNo ratings yet
- Assignment 3Document13 pagesAssignment 3luter alexNo ratings yet
- NCSU Py208n Cheat SheetDocument3 pagesNCSU Py208n Cheat SheetMark FernandezNo ratings yet
- Handout 01 316 1207 PDFDocument5 pagesHandout 01 316 1207 PDFIan CarlsenNo ratings yet
- Formula SheetDocument5 pagesFormula SheetKevin YeNo ratings yet
- Hmwk02 SolutionDocument4 pagesHmwk02 SolutionTarik ZiadNo ratings yet
- MM4 - Plane and Solid Geometry - Sample ProblemsDocument9 pagesMM4 - Plane and Solid Geometry - Sample Problemsjunelchristiandinapo1No ratings yet
- Final ExamDocument4 pagesFinal ExamaaatechwritingNo ratings yet
- UEE Assignments 1,2,3Document11 pagesUEE Assignments 1,2,3Kaone OsupileNo ratings yet
- Ω mH μF V rad s deg degDocument2 pagesΩ mH μF V rad s deg degTrisha May VillanuevaNo ratings yet
- Phys XII Chap1 Live SessionDocument46 pagesPhys XII Chap1 Live SessionNeha TiwariNo ratings yet
- Design of Rogowski Coil With IntegratorDocument32 pagesDesign of Rogowski Coil With IntegratorrichatNo ratings yet
- 15 Spherical CoordinatesDocument17 pages15 Spherical CoordinatesRaul FraulNo ratings yet
- BEE4223 Power Electronics & Drives SystemsDocument40 pagesBEE4223 Power Electronics & Drives Systemsmalathynarayani100% (1)
- HW 7Document15 pagesHW 7Shane Patrick PanilagNo ratings yet
- 1 Basic1Document42 pages1 Basic1Raja Saad0% (1)
- Walker, J., Halliday, D., & Resnick, R. (2011) - Fundamentals of Physics. 6th Edition, Page 837. Hoboken, NJ, WileyDocument8 pagesWalker, J., Halliday, D., & Resnick, R. (2011) - Fundamentals of Physics. 6th Edition, Page 837. Hoboken, NJ, WileyBigBluesterNo ratings yet
- Final04 221 EC2 Resonance CircuitDocument41 pagesFinal04 221 EC2 Resonance CircuitDip GhoshNo ratings yet
- Robotics1 12.01.11Document8 pagesRobotics1 12.01.11asalifew belachewNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Hydrant Mounted Monitor Installation Instructions: E B M - C - , IDocument3 pagesHydrant Mounted Monitor Installation Instructions: E B M - C - , Icld72No ratings yet
- Single Span Fixed Beam Design of Beam As Per Is 456:2000: For SupportDocument7 pagesSingle Span Fixed Beam Design of Beam As Per Is 456:2000: For SupportDipankar NathNo ratings yet
- Owner'S Manual: Full DC Inverter Xpower VRF Outdoor UnitDocument11 pagesOwner'S Manual: Full DC Inverter Xpower VRF Outdoor UnitDjamal MohammediNo ratings yet
- HT Internal Pract Viva ScheduleDocument2 pagesHT Internal Pract Viva ScheduleAmit sharmaNo ratings yet
- Ficha Tecnica - MangueraDocument1 pageFicha Tecnica - MangueraWALTER RUEDANo ratings yet
- Installation Manual For Level Control Diaphragm: AddressDocument11 pagesInstallation Manual For Level Control Diaphragm: AddresspredilettoNo ratings yet
- Elu ADE88 InstructionsDocument7 pagesElu ADE88 Instructionsj_abendstern46880% (1)
- Din 580Document1 pageDin 580Varun KumarNo ratings yet
- 2D03 Assignment 1Document5 pages2D03 Assignment 1Aisha ChaudhryNo ratings yet
- Motoare Hidraulice-1 Cilindree-R8d-ItalgroupDocument210 pagesMotoare Hidraulice-1 Cilindree-R8d-ItalgroupANTON NEAGUNo ratings yet
- Bolt or Pin in Double Shear Equation and Calculator - Engineers EdgeDocument2 pagesBolt or Pin in Double Shear Equation and Calculator - Engineers EdgeYadav RahulNo ratings yet
- Overhauling Spare Parts For HS5165Document3 pagesOverhauling Spare Parts For HS5165Naqash RazzaqNo ratings yet
- Site Guide A6 OnlineDocument20 pagesSite Guide A6 OnlineHarrison LangNo ratings yet
- Valvula Neumatica Honeywell PC1Document8 pagesValvula Neumatica Honeywell PC1DAVIDNo ratings yet
- Rockwell Hardness (HRC, HRB) To Brinell Hardness (HB or BHN) ConversionDocument4 pagesRockwell Hardness (HRC, HRB) To Brinell Hardness (HB or BHN) Conversioncascade150% (2)
- Ferry Loading Ramp: TP501 Festo DidacticDocument9 pagesFerry Loading Ramp: TP501 Festo Didacticnanek100% (1)
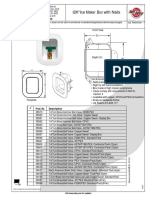
- I2K Ice Maker Box With Nails: Submittal SpecificationDocument2 pagesI2K Ice Maker Box With Nails: Submittal SpecificationPatricio FerradaNo ratings yet
- Rinnai Ultra Series BrochureDocument2 pagesRinnai Ultra Series Brochureapi-221502147No ratings yet
- Brochure Secador NVCDocument7 pagesBrochure Secador NVCByron PanchiNo ratings yet
- NORSOK Standards Infographic A2 Web July 2022Document1 pageNORSOK Standards Infographic A2 Web July 2022Usman NaseemNo ratings yet
- t6cc t6ccw Denison Vane Pumps IndustrialDocument5 pagest6cc t6ccw Denison Vane Pumps IndustrialSamuel Lopez BenitesNo ratings yet
- YCN - Fiat Tractor Parts 2Document432 pagesYCN - Fiat Tractor Parts 2deisy ortega100% (4)
- Main Dimensions: Adapter Kit To Power Take Offs VolvoDocument1 pageMain Dimensions: Adapter Kit To Power Take Offs Volvoجلال الرماحNo ratings yet
- Tow Way Slab Design by Retwan 1Document11 pagesTow Way Slab Design by Retwan 1Retwann KhalidNo ratings yet
- Attachment#4 DatasheetDocument13 pagesAttachment#4 DatasheetzhangNo ratings yet
- Renk Power Take Off SystemsDocument2 pagesRenk Power Take Off SystemssatNo ratings yet
- DMS & DW-HC MS-700 Wellhead Presentation (Bien Dong)Document140 pagesDMS & DW-HC MS-700 Wellhead Presentation (Bien Dong)New Auto TVNo ratings yet
- 285 Hose AC CLIP BUL 4480-B204Document8 pages285 Hose AC CLIP BUL 4480-B204Anderson GoyesNo ratings yet