You might also like
- How to Rebuild & Modify Ford C4 & C6 Automatic TransmissionsFrom EverandHow to Rebuild & Modify Ford C4 & C6 Automatic TransmissionsRating: 5 out of 5 stars5/5 (5)
- Refrigerator ValveDocument3 pagesRefrigerator ValveAve Niels100% (1)
- Wiring Diagrams 04 FABIADocument494 pagesWiring Diagrams 04 FABIABaciu Nicolae71% (7)
- Intro To CNCDocument28 pagesIntro To CNCnaga100% (1)
- Team 4 - Jishnu P UDocument24 pagesTeam 4 - Jishnu P UVetriselvan MuthukumarNo ratings yet
- Mechanical Power TransmissionsDocument22 pagesMechanical Power TransmissionsrodrigoperezsimoneNo ratings yet
- Design and Fabrication of Button Operated Gear ShifterDocument18 pagesDesign and Fabrication of Button Operated Gear Shiftersnehar redkarNo ratings yet
- Seminar 140207113636 Phpapp01Document24 pagesSeminar 140207113636 Phpapp01SOURAV KUMARNo ratings yet
- Epicyclic Gear Train ApparatusDocument8 pagesEpicyclic Gear Train ApparatusGurmeet Mehma83% (6)
- Chapter 7: Power Transmitting Systems: WWW - Covenantuniversity.edu - NGDocument23 pagesChapter 7: Power Transmitting Systems: WWW - Covenantuniversity.edu - NGTonye AYAFANo ratings yet
- Presentation On Design and Development of Pipe Bending MachineDocument45 pagesPresentation On Design and Development of Pipe Bending MachineAdarsh GowdaNo ratings yet
- Button Operated Gear Shifting Mechanism For Two WheelerDocument23 pagesButton Operated Gear Shifting Mechanism For Two WheelerAlex Salvin75% (8)
- Speed Breaker Power GenerationDocument21 pagesSpeed Breaker Power GenerationmukundNo ratings yet
- Fixturlaser Introduction To Shaft AlignmentDocument23 pagesFixturlaser Introduction To Shaft Alignmenthicham 85No ratings yet
- Power Train: - Manual Transmission - Automatic Transmission - Braking SystemDocument20 pagesPower Train: - Manual Transmission - Automatic Transmission - Braking SystemTahmid-ur RahmanNo ratings yet
- Digital Speedometer: Project by Group 8 Samkit Shah Tom Shamoun Elden SabaDocument31 pagesDigital Speedometer: Project by Group 8 Samkit Shah Tom Shamoun Elden SabaWan ShahmisufiNo ratings yet
- Project Report: Department of Mechanical EngineeringDocument59 pagesProject Report: Department of Mechanical Engineeringpradeep9982100% (1)
- BELT Lecture 01Document56 pagesBELT Lecture 01mahaveer dasNo ratings yet
- Shu TrsDocument4 pagesShu Trsshubham kumarNo ratings yet
- E - BikeDocument17 pagesE - BikeSaurabh DeshmukhNo ratings yet
- Shri Vaishnav Institute of Technology and Science, IndoreDocument16 pagesShri Vaishnav Institute of Technology and Science, Indoreavinash malviyaNo ratings yet
- Power Train: - Manual Transmission - Automatic Transmission - Braking SystemDocument20 pagesPower Train: - Manual Transmission - Automatic Transmission - Braking SystemMohammad Samir HassanNo ratings yet
- VPM1022 Design and Fabrication of Gearless Transmission HARIPRASATH 9345208737Document6 pagesVPM1022 Design and Fabrication of Gearless Transmission HARIPRASATH 9345208737sageetha756No ratings yet
- Design and Manufacturing of Automatic Gear Shifter For BicycleDocument10 pagesDesign and Manufacturing of Automatic Gear Shifter For BicycleMannam RujendraNo ratings yet
- Gear BoxDocument36 pagesGear BoxNimoNo ratings yet
- Elbow Mechanism PDFDocument851 pagesElbow Mechanism PDFSivaNo ratings yet
- KPR Institute of Engineering and Technology: Design and Fabrication of Paddle Gear Shifter Submitted byDocument12 pagesKPR Institute of Engineering and Technology: Design and Fabrication of Paddle Gear Shifter Submitted bygash287No ratings yet
- Tri Wheeled Solar Powered Electric Vehicle PPT For 3rd ReviewDocument23 pagesTri Wheeled Solar Powered Electric Vehicle PPT For 3rd ReviewVineel Vihar100% (1)
- Installation MaintenanceDocument4 pagesInstallation MaintenanceHugoh Kansirgi DavidNo ratings yet
- Power Assisted Gear Shifting Mechanism For AutomobilesDocument12 pagesPower Assisted Gear Shifting Mechanism For AutomobilesSurendra Chaudhary0% (1)
- Unit Iii Hydromatic Drive: Fluid Coupling ConverterDocument44 pagesUnit Iii Hydromatic Drive: Fluid Coupling ConverterGuruLakshmiNo ratings yet
- Design and Fabrication of Pedal Operated Water PumpDocument14 pagesDesign and Fabrication of Pedal Operated Water PumpNagesh Sunny67% (3)
- Dokumen - Tips Geneva Wheel Based Auto Roll Punching MachineDocument30 pagesDokumen - Tips Geneva Wheel Based Auto Roll Punching MachineBaldev SinghNo ratings yet
- Project Report On Gear PumpDocument20 pagesProject Report On Gear PumpSunil Kumar Yadav100% (3)
- ProjectDocument20 pagesProjectAbhishek RankawatNo ratings yet
- DME MiniProjectDocument17 pagesDME MiniProjectJinmay KalitaNo ratings yet
- Moltres Ppt. For Esvc-2014Document16 pagesMoltres Ppt. For Esvc-2014pankajNo ratings yet
- Semi - Auto Pnuematic Gear ShifterDocument20 pagesSemi - Auto Pnuematic Gear ShifterShalabh Garg100% (1)
- Automatic Hammering: Group Member NameDocument13 pagesAutomatic Hammering: Group Member Namefjxr9tkjhhNo ratings yet
- Design and Fabrication of Scotch Yoke Mechanism - Main PpiDocument24 pagesDesign and Fabrication of Scotch Yoke Mechanism - Main PpiMusic LoverNo ratings yet
- Racetrack Raiders MNIT, JaipurDocument13 pagesRacetrack Raiders MNIT, JaipurKartikey SharmaNo ratings yet
- Fabrication of Reverse Gear in Two WheelerDocument26 pagesFabrication of Reverse Gear in Two WheelerSai RamNo ratings yet
- Cam Analysis ApparatusDocument7 pagesCam Analysis ApparatusGurmeet Mehma100% (6)
- The Mechanical Aspects of RoboticsDocument19 pagesThe Mechanical Aspects of RoboticsSuryakant MunjewarNo ratings yet
- ParabolaDocument5 pagesParabolaJo5huaNo ratings yet
- Motor Passo A Passo InfoDocument37 pagesMotor Passo A Passo InfojpncorreiaNo ratings yet
- Fuzzytech Crane SimulationDocument27 pagesFuzzytech Crane SimulationMomi Tza100% (1)
- Design and Fabrication of Motorised Scotch Yoke MechanismDocument16 pagesDesign and Fabrication of Motorised Scotch Yoke Mechanismlost wolfNo ratings yet
- Project Publish 2Document7 pagesProject Publish 2Sreekanth ReddyNo ratings yet
- Design of Valve Lapping Machine For Ic EngineDocument35 pagesDesign of Valve Lapping Machine For Ic EngineIfa75% (4)
- Rolling ResistanceDocument30 pagesRolling ResistancenewshatsNo ratings yet
- EGB111 Week 8 Studio SlidesDocument23 pagesEGB111 Week 8 Studio SlidesWinston BoonNo ratings yet
- Thesis PowerpointDocument31 pagesThesis PowerpointIbrahim ErdachewNo ratings yet
- Automatic Break in Hill StationDocument25 pagesAutomatic Break in Hill Stationsuraj dhulannavarNo ratings yet
- Indo Danish Tool Room: Industrial TrainingDocument28 pagesIndo Danish Tool Room: Industrial TrainingPriyanshu KumarNo ratings yet
- Scisor Jack PresentationDocument21 pagesScisor Jack Presentationgemechu mengistu100% (1)
- Torque MeasurementDocument43 pagesTorque Measurementvadithya1515No ratings yet
- Auto 5sem ATEDocument97 pagesAuto 5sem ATEatulsemiloNo ratings yet
- Performance Characteristics of Road Vehicles 2Document108 pagesPerformance Characteristics of Road Vehicles 2DEEPSNo ratings yet
- Automatic Gear Transmission Research PaperDocument8 pagesAutomatic Gear Transmission Research Paperkikufevoboj2100% (1)
- Motorised Jack With Rach Lock MechanismDocument26 pagesMotorised Jack With Rach Lock MechanismPrajay BhavsarNo ratings yet
- Wheel Balancing Machine PDFDocument26 pagesWheel Balancing Machine PDFSrinivas100% (1)
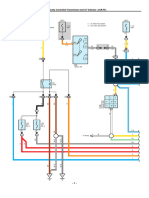
- Diagramas ECT y AT Motor 2GR-FE Camry 2007Document16 pagesDiagramas ECT y AT Motor 2GR-FE Camry 2007Gregory MarchanNo ratings yet
- Cable Glands, Strain Relief: Select VersionsDocument4 pagesCable Glands, Strain Relief: Select VersionsChandrasekar KrishnamurthyNo ratings yet
- Service Training: Vorsprung Durch Technik WWW - Audi.deDocument60 pagesService Training: Vorsprung Durch Technik WWW - Audi.derichardesanchezNo ratings yet
- (2004) 750-1060 CFM (Form 09-0001)Document2 pages(2004) 750-1060 CFM (Form 09-0001)Israel RuizNo ratings yet
- Diesel Engine ComponentsDocument33 pagesDiesel Engine ComponentsRicky Thomas100% (1)
- NB Parts ConstructionDocument196 pagesNB Parts ConstructionAgus YulfizarNo ratings yet
- Unit 19 Single - Phase Induction MotorsDocument4 pagesUnit 19 Single - Phase Induction MotorsKim Jeff BeringuelNo ratings yet
- QSPDocument20 pagesQSPa k singhNo ratings yet
- Pulsar p150 Rev 00 Nov 2022 - PDF - Brake - ClutchDocument37 pagesPulsar p150 Rev 00 Nov 2022 - PDF - Brake - Clutchsriramamototors amangalNo ratings yet
- Standby 300 Kva Prime 275 kVA: Diesel Generator SetDocument4 pagesStandby 300 Kva Prime 275 kVA: Diesel Generator Setvanaselvan vpNo ratings yet
- Ansi-Nema MG 1-2003, Revision 1-2004Document584 pagesAnsi-Nema MG 1-2003, Revision 1-2004manuelro7450% (2)
- Uenr2534uenr2534-02 Sis PDFDocument15 pagesUenr2534uenr2534-02 Sis PDFDiego zapataNo ratings yet
- Solucionador de Problemas VibroDocument8 pagesSolucionador de Problemas Vibrojavier lopezNo ratings yet
- ETL Yanmar Schneefraese YSR 3120 - 3420Document73 pagesETL Yanmar Schneefraese YSR 3120 - 3420luna281068No ratings yet
- BMW Marine Engines d7 Workshop ManualDocument4 pagesBMW Marine Engines d7 Workshop Manuallouise100% (56)
- KD0506PHB3 Sunon FansDocument15 pagesKD0506PHB3 Sunon FansZain NertaNo ratings yet
- Regal SGA CatDocument40 pagesRegal SGA CatIee XpNo ratings yet
- b7 Summe b7-5 Europa PDFDocument173 pagesb7 Summe b7-5 Europa PDFValeriy ValkovetsNo ratings yet
- 94-Rvf400rr HRC ManualDocument13 pages94-Rvf400rr HRC ManualhungkuenNo ratings yet
- Product Data Sheet: Trane™ ThermostatsDocument4 pagesProduct Data Sheet: Trane™ ThermostatsGiovanni HFNo ratings yet
- Failure Analysis of Engine Valve Using ANSYSDocument5 pagesFailure Analysis of Engine Valve Using ANSYSMomina AliNo ratings yet
- 1472199732847sunwin 10.05Document8 pages1472199732847sunwin 10.05samsularief03No ratings yet
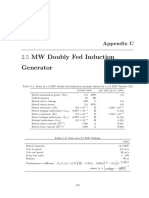
- 2.5 MW Doubly Fed Induction Generator: Appendix CDocument1 page2.5 MW Doubly Fed Induction Generator: Appendix CShaswat JhaNo ratings yet
- Small Helmholtz Course: © Frits OvermarsDocument3 pagesSmall Helmholtz Course: © Frits OvermarsSaddam shinNo ratings yet
- Tutorial For Shaft DesignDocument7 pagesTutorial For Shaft Designdashatanli100% (1)
- Throttle ActuatorDocument1 pageThrottle ActuatorGARAGE PREMIUMNo ratings yet
- Frequently Asked Questions About The L 275 E / L 550 EDocument3 pagesFrequently Asked Questions About The L 275 E / L 550 EmarquezcopNo ratings yet