You might also like
- Electrical DrivesDocument113 pagesElectrical DrivesMuhammad Danyal ZahidNo ratings yet
- Power Electronics Design Handbook: Low-Power Components and ApplicationsFrom EverandPower Electronics Design Handbook: Low-Power Components and ApplicationsRating: 4 out of 5 stars4/5 (2)
- Electrical DrivesDocument113 pagesElectrical DrivesBAVISETTI NARENDRANo ratings yet
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Materi 2-1 Kendali MotorDocument21 pagesMateri 2-1 Kendali MotorSherake MekoNo ratings yet
- Electrical Drives & ControlDocument41 pagesElectrical Drives & ControlmahalakshmiNo ratings yet
- Bab 3 Komponen Semikonduktor Rev2Document96 pagesBab 3 Komponen Semikonduktor Rev2ilhamalifsNo ratings yet
- Power Electronics 2 Eletrical DrivesDocument123 pagesPower Electronics 2 Eletrical DrivesNaga Ananth100% (2)
- Power ElectronicsDocument489 pagesPower ElectronicsLộc Phạm vănNo ratings yet
- Electrical Drives:: An Application of Power ElectronicsDocument36 pagesElectrical Drives:: An Application of Power ElectronicsaswardiNo ratings yet
- Modern Electrical Drive Systems and Power Electronic ConvertersDocument9 pagesModern Electrical Drive Systems and Power Electronic ConvertersGthulasi78No ratings yet
- Power Electronics IntroductionDocument21 pagesPower Electronics IntroductionJr ReforbaNo ratings yet
- Powerelectronicdrivesppt 140308080610 Phpapp02Document36 pagesPowerelectronicdrivesppt 140308080610 Phpapp02geniunetNo ratings yet
- 3 Stage / 2021-2022 University of Duhok: Dr. Hasan A. MohammedDocument19 pages3 Stage / 2021-2022 University of Duhok: Dr. Hasan A. MohammedlayaNo ratings yet
- Static Power Conversion I: EEE-463 Lecture NotesDocument48 pagesStatic Power Conversion I: EEE-463 Lecture NotesErgin ÖzdikicioğluNo ratings yet
- Power ElectronicsDocument30 pagesPower ElectronicsRohit SinghNo ratings yet
- 01 - Introduction To Multilevel InvertersDocument53 pages01 - Introduction To Multilevel Invertersp09el860No ratings yet
- Introduction to Multilevel InvertersDocument53 pagesIntroduction to Multilevel InvertersAnnas QureshiNo ratings yet
- Electrical Drives:: An Application of Power ElectronicsDocument53 pagesElectrical Drives:: An Application of Power ElectronicshanuNo ratings yet
- ECEg-7411 Advanced Power Electronics and Microcontrollers for Renewable Energy Systems LectureDocument14 pagesECEg-7411 Advanced Power Electronics and Microcontrollers for Renewable Energy Systems Lecturebisrat yeshidagnaNo ratings yet
- Introduction To Power ElectronicsDocument28 pagesIntroduction To Power Electronicsanon_514500460No ratings yet
- Power Electronics PPT 1st Module (Autosaved)Document61 pagesPower Electronics PPT 1st Module (Autosaved)chetan100% (1)
- Introduction To Electrical DrivesDocument71 pagesIntroduction To Electrical DrivesZafirah HanafiNo ratings yet
- Introduction to Power ElectronicsDocument29 pagesIntroduction to Power ElectronicschetanNo ratings yet
- 1.ppt of PeDocument32 pages1.ppt of PeSahmi Abdulqahar NizoriNo ratings yet
- 1Document32 pages1Mohit ChavdaNo ratings yet
- Power ElectronicsDocument28 pagesPower Electronicspavan96100% (5)
- PE Intro: History, Apps & Simple ExDocument28 pagesPE Intro: History, Apps & Simple ExAijaz HussainNo ratings yet
- L1 PDFDocument26 pagesL1 PDFRajeev ValunjkarNo ratings yet
- EEE 338 Power ElectronicsDocument28 pagesEEE 338 Power ElectronicsdaudNo ratings yet
- Circuits Devices and ApplicationsDocument30 pagesCircuits Devices and ApplicationsTe NgNo ratings yet
- تسير كهربائيDocument95 pagesتسير كهربائيaaNo ratings yet
- PE1 - Lect 1-PN Junction Diode PrinciplesDocument32 pagesPE1 - Lect 1-PN Junction Diode PrinciplesAbdel-aziz SamiNo ratings yet
- Electric Drives: Dr. Sasidharan SreedharanDocument27 pagesElectric Drives: Dr. Sasidharan SreedharanaswardiNo ratings yet
- Lecture 01 - Introduction To Power ElectroncisDocument31 pagesLecture 01 - Introduction To Power ElectroncisAshna JoseNo ratings yet
- Applications of Power Electronics To Power SystemsDocument8 pagesApplications of Power Electronics To Power SystemsManish meenaNo ratings yet
- Relation With Multiple Disciplines: Oni CsDocument5 pagesRelation With Multiple Disciplines: Oni CsHossein DavijaniNo ratings yet
- Lec 2 (Introduction) ) 1Document42 pagesLec 2 (Introduction) ) 1Engr Muhammad Faisal YaqoobNo ratings yet
- Eel 5245 Power Electronics I Lecture #2: Chapter 1 Introduction To Power ElectronicsDocument27 pagesEel 5245 Power Electronics I Lecture #2: Chapter 1 Introduction To Power ElectronicsalbertNo ratings yet
- 1 IntroductionDocument36 pages1 IntroductionSamiul TashbirNo ratings yet
- Elektronika Daya EnglishVersionDocument17 pagesElektronika Daya EnglishVersionYanty DaudNo ratings yet
- Power Electronics for Industrial ProcessesDocument108 pagesPower Electronics for Industrial ProcessesChristian Dave TamparongNo ratings yet
- Introduction To Power Electronics, History & Applications (1), Semiconductor Devices EtcDocument73 pagesIntroduction To Power Electronics, History & Applications (1), Semiconductor Devices Etckomal phulpotoNo ratings yet
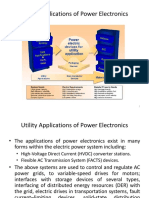
- Utility Applications of Power ElectronicsDocument28 pagesUtility Applications of Power ElectronicsElden Kyle BillonesNo ratings yet
- Electrical Drives ExplainedDocument71 pagesElectrical Drives ExplainedMohammad Amirul ShafiqNo ratings yet
- Control AC Output from DC Using a Full Bridge InverterDocument50 pagesControl AC Output from DC Using a Full Bridge InverterMohamed AhmedNo ratings yet
- MmuDocument113 pagesMmuSunny SanNo ratings yet
- Lecture1 - EECE 491-01Document19 pagesLecture1 - EECE 491-01Mahmoud AminNo ratings yet
- Lec 01Document48 pagesLec 01Bastián Olfos MárquezNo ratings yet
- Lecture 2 - Inverter - NEWDocument51 pagesLecture 2 - Inverter - NEWAsha DurafeNo ratings yet
- Electrical Basic and Classic ControlDocument177 pagesElectrical Basic and Classic ControlBudi BudiNo ratings yet
- Electrical DC Motor Drives PDFDocument126 pagesElectrical DC Motor Drives PDFMaitriyaditya BaruaNo ratings yet
- Introduction To Power: Unit - 1 ElectronicsDocument41 pagesIntroduction To Power: Unit - 1 ElectronicsDevi Debora SiregarNo ratings yet
- Peappl Lecture Notes 01Document216 pagesPeappl Lecture Notes 01OsmanNo ratings yet
- Introduction to Electric DrivesDocument49 pagesIntroduction to Electric DrivesRamesh BabuNo ratings yet
- Introduction To: Power Electronics SystemsDocument41 pagesIntroduction To: Power Electronics SystemsHOD EEE TRPNo ratings yet
- Module1 PDFDocument19 pagesModule1 PDFSetya ArdhiNo ratings yet
- Microcontrollers For The Drive Train in Hybrid and Electric VehiclesDocument8 pagesMicrocontrollers For The Drive Train in Hybrid and Electric VehiclesHaseebPirachaNo ratings yet
- Unit 1Document31 pagesUnit 1bilal alkhNo ratings yet
- How Can I Learn C++ QuicklyDocument218 pagesHow Can I Learn C++ QuicklyMathewsNo ratings yet
- Digital 48 InstructionsDocument4 pagesDigital 48 InstructionsAmir RahbariNo ratings yet
- Adhnt 103Document2 pagesAdhnt 103api-3782519No ratings yet
- A Review On Methods, Issues and Challenges in Neuromorphic EngineeringDocument5 pagesA Review On Methods, Issues and Challenges in Neuromorphic Engineeringsyed aslam aliNo ratings yet
- Act20p CML 10 Ao RC SDocument4 pagesAct20p CML 10 Ao RC SGoran MladenovicNo ratings yet
- Chapter 1Document2 pagesChapter 1Paulo YladeNo ratings yet
- Farm Equipment Safety Check GuideDocument14 pagesFarm Equipment Safety Check Guidejose ariel barroa jrNo ratings yet
- Customdevelopmentofwebdynproessapplicationsusingfloorplanmanager 101008141347 Phpapp01Document98 pagesCustomdevelopmentofwebdynproessapplicationsusingfloorplanmanager 101008141347 Phpapp01davidprasadNo ratings yet
- Digital Control of Switching Mode Power Supply Simone Buso 2Document77 pagesDigital Control of Switching Mode Power Supply Simone Buso 2Ahmed58seribegawanNo ratings yet
- Detect and Identify Suspicious HP Supplies and ProductsDocument24 pagesDetect and Identify Suspicious HP Supplies and ProductsRamcesNo ratings yet
- Hyatt Regency Walkway Collapse Case StudyDocument2 pagesHyatt Regency Walkway Collapse Case Studymuizzey aufaNo ratings yet
- Surpass Hit 7025Document2 pagesSurpass Hit 7025Đỗ TháiNo ratings yet
- Outbound CT-e: Prerequisites Object For SAP Note 3324837Document3 pagesOutbound CT-e: Prerequisites Object For SAP Note 3324837Davi EliasNo ratings yet
- (June-2021) New PassLeader JN0-348 Exam DumpsDocument7 pages(June-2021) New PassLeader JN0-348 Exam Dumpsbaolinh291187No ratings yet
- Alliance Supplier Guide 2.3Document3 pagesAlliance Supplier Guide 2.3MNo ratings yet
- 2 - 3 PfeffermannDocument17 pages2 - 3 PfeffermannDHARMENDRANo ratings yet
- Project Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariDocument3 pagesProject Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariSuraj UpadhyayNo ratings yet
- P Series Fiber Laser UGDocument67 pagesP Series Fiber Laser UGHG GROUPNo ratings yet
- Install Radmin 3 - General Installation Guide for Remote AccessDocument10 pagesInstall Radmin 3 - General Installation Guide for Remote AccessPerryRimandaNo ratings yet
- Iso 11898 3 2006 en PDFDocument11 pagesIso 11898 3 2006 en PDFSebastian Linares RugelesNo ratings yet
- 965-0520 Onan EGPxx EGHxx Portable Gensets Service Manual (12-1995)Document161 pages965-0520 Onan EGPxx EGHxx Portable Gensets Service Manual (12-1995)jamesNo ratings yet
- Oracle Process Manufacturing (OPM) Operating Guide LinesDocument13 pagesOracle Process Manufacturing (OPM) Operating Guide LinesAtif Masood100% (1)
- Fundamentals of CNC MachiningDocument258 pagesFundamentals of CNC MachiningAlex Kiko Villalobos100% (3)
- Seat Belt UsageDocument2 pagesSeat Belt UsageAnkitRavalNo ratings yet
- Vini Internship ReportDocument37 pagesVini Internship ReportsakshamNo ratings yet
- Ce 2766Document19 pagesCe 2766Alexe VictorNo ratings yet
- PTS 2000Document76 pagesPTS 2000John Jairo CárdenasNo ratings yet
- Unit - IiiDocument41 pagesUnit - IiiJit Agg0% (1)
- Fuel Tank Lifting REV01Document7 pagesFuel Tank Lifting REV01armagan55No ratings yet
- ISO 45001 Objectives and ProgramsDocument2 pagesISO 45001 Objectives and ProgramsFaridUddin Ahmed100% (3)