You might also like
- Experiment 5: Resistors in Series and Parallel CircuitsDocument2 pagesExperiment 5: Resistors in Series and Parallel CircuitsVictoria De GuzmanNo ratings yet
- SMPSDocument46 pagesSMPSNimsiri AbhayasingheNo ratings yet
- Flyback CCMVSDCM Rev1p2 PDFDocument18 pagesFlyback CCMVSDCM Rev1p2 PDFALlan ABiangNo ratings yet
- 5.DC-DC Converters (Part 2)Document35 pages5.DC-DC Converters (Part 2)dwiaguspurwantoNo ratings yet
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDocument74 pagesChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsHoang ManhNo ratings yet
- Tutorial CascadeDocument44 pagesTutorial CascadeLeonardo Rojas HNo ratings yet
- 10 DC-DC Buck ConverterDocument36 pages10 DC-DC Buck ConverterAnas RajputNo ratings yet
- Power Electronics 5 - 2017Document22 pagesPower Electronics 5 - 2017FUCKYOUNo ratings yet
- Double Boost Converter Design CalculationDocument4 pagesDouble Boost Converter Design CalculationmoeNo ratings yet
- TLV 62085Document25 pagesTLV 62085Ramón MartinezNo ratings yet
- Power Electronics Power Electronics: Course: BookDocument16 pagesPower Electronics Power Electronics: Course: BooksufiiiiyanNo ratings yet
- Power Electronics: DC-DC Converters (Choppers)Document22 pagesPower Electronics: DC-DC Converters (Choppers)taufiqishak09No ratings yet
- Power Electronics: DC-DC Converters (Choppers)Document35 pagesPower Electronics: DC-DC Converters (Choppers)aswardi8756No ratings yet
- Lec4.4 Power DescipationDocument17 pagesLec4.4 Power Descipationnadeem47No ratings yet
- DC Motor Drives (Switched Mode Converter)Document23 pagesDC Motor Drives (Switched Mode Converter)Zafirah HanafiNo ratings yet
- Shakiso Relay Setting Calculations For 25 MVA 132 - 33kV Trafo - Rev00 - FiqDocument12 pagesShakiso Relay Setting Calculations For 25 MVA 132 - 33kV Trafo - Rev00 - FiqEyasu YemataNo ratings yet
- PPT Isolated DC-DC Converters (Benny Yeung)Document31 pagesPPT Isolated DC-DC Converters (Benny Yeung)Terry rickyNo ratings yet
- EE462L, Spring 2014 DC DC Buck ConverterDocument37 pagesEE462L, Spring 2014 DC DC Buck ConverterZulqarnain KhanNo ratings yet
- EE462L, Spring 2014 DC DC Buck ConverterDocument37 pagesEE462L, Spring 2014 DC DC Buck ConverterprateekNo ratings yet
- DC To DC ConvertersDocument40 pagesDC To DC ConvertersJamir CalNo ratings yet
- Buck - Converters For Portable ApplicationDocument70 pagesBuck - Converters For Portable ApplicationanandNo ratings yet
- CukDocument28 pagesCukEdon DergutiNo ratings yet
- Lecture 4 Boost ConverterDocument8 pagesLecture 4 Boost ConverterGabriel Verdesoto YepezNo ratings yet
- Isolated DC-DC Converters: Chapter TwoDocument12 pagesIsolated DC-DC Converters: Chapter TwoMarko SvalinaNo ratings yet
- Brno Flyback Design Rev1 PDFDocument103 pagesBrno Flyback Design Rev1 PDFela81No ratings yet
- 1311231-6,3 MVA 110-0,8-0,8 KV (1) MBT PDFDocument1 page1311231-6,3 MVA 110-0,8-0,8 KV (1) MBT PDFh.tamazyan1402No ratings yet
- 4.2 Current Bidirectional Switches PDFDocument7 pages4.2 Current Bidirectional Switches PDFJahangeer SoomroNo ratings yet
- 1PH Half Bridge InverterDocument31 pages1PH Half Bridge InvertertintuvrNo ratings yet
- Microchip PDFDocument16 pagesMicrochip PDFdiogo18spNo ratings yet
- Module 4 - DC Motor Drives ChopperDocument12 pagesModule 4 - DC Motor Drives ChoppersyakirmustapaNo ratings yet
- 4740 Lecture06 Inverter SizingDocument16 pages4740 Lecture06 Inverter Sizingkrrish06230No ratings yet
- Transformer Recommendation Document-215K To 255kDocument4 pagesTransformer Recommendation Document-215K To 255kKSL DESIGNNo ratings yet
- Single Phase Half Bridge InverterDocument29 pagesSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- 2.4 Jason Stauth Hybrid Switched Capacitor Converters Topologies Trends and ComparisonDocument28 pages2.4 Jason Stauth Hybrid Switched Capacitor Converters Topologies Trends and ComparisonpallaveevbhatnagarNo ratings yet
- PCIM Asia 2015Document40 pagesPCIM Asia 2015elsmanNo ratings yet
- FCP104N60 D-2312015Document11 pagesFCP104N60 D-2312015Electronica Analogica Y DigitalNo ratings yet
- Module-3 (DC Chopper)Document76 pagesModule-3 (DC Chopper)Prasann KatiyarNo ratings yet
- Transformer ProtectiponDocument116 pagesTransformer ProtectiponAmany HamdyNo ratings yet
- Protection of TrafoDocument115 pagesProtection of TrafoEngrHuza100% (1)
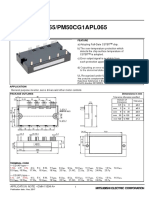
- PM50CG1AP065/PM50CG1APL065Document9 pagesPM50CG1AP065/PM50CG1APL065Omar SandreNo ratings yet
- DC-DC Switch-Mode Converters: ApplicationsDocument16 pagesDC-DC Switch-Mode Converters: ApplicationsLal ChandNo ratings yet
- TRAX - Test Report Ta DeltaDocument3 pagesTRAX - Test Report Ta DeltaganeshNo ratings yet
- Capacitores NEC-toKin Tantalio PDFDocument36 pagesCapacitores NEC-toKin Tantalio PDFMaxi LectorNo ratings yet
- 2 - Analog Signal ProcessingDocument22 pages2 - Analog Signal ProcessingTuanHungNo ratings yet
- Synchronous Rectification National Power Designer 112Document8 pagesSynchronous Rectification National Power Designer 112sivasankartikkuNo ratings yet
- CAP.4. Conv. DC-DC Cu IzolareDocument9 pagesCAP.4. Conv. DC-DC Cu IzolareCondracheClaudiaNo ratings yet
- Electric Vehicles: DC To DC ConvertersDocument31 pagesElectric Vehicles: DC To DC ConvertersSPARSH RAJNo ratings yet
- (B) 18 Pages Converter Dynamics and ControlDocument18 pages(B) 18 Pages Converter Dynamics and ControlClare DianneNo ratings yet
- Module-3 (A) - Controlled Rectifiers - VII-POWER ELECTRONICS - 2015-17 SchemeDocument37 pagesModule-3 (A) - Controlled Rectifiers - VII-POWER ELECTRONICS - 2015-17 SchemeK N DEEPSHINo ratings yet
- Buck Boost Converter EET504 PDFDocument13 pagesBuck Boost Converter EET504 PDFnasiruddinNo ratings yet
- 7 8 S R 1 0 0 Series: For Assistance or To Order, CallDocument7 pages7 8 S R 1 0 0 Series: For Assistance or To Order, Calllunalo marcNo ratings yet
- 7 8 S R 1 0 0 Series: For Assistance or To Order, CallDocument6 pages7 8 S R 1 0 0 Series: For Assistance or To Order, CallLuis Enrique De los Santos FarfánNo ratings yet
- High-Efficiency, Step-Down DC/DC Converter: Features DescriptionDocument8 pagesHigh-Efficiency, Step-Down DC/DC Converter: Features DescriptionAlexandra Adriana RaduNo ratings yet
- Technical Specificationof IDT Solar ProjectDocument12 pagesTechnical Specificationof IDT Solar ProjectJitendra Pathak100% (1)
- TKE 071208 - Week - 2 - Diode ApplicationDocument21 pagesTKE 071208 - Week - 2 - Diode ApplicationNivika TiffanyNo ratings yet
- LK.R, Cuk: Zero-Voltage-Transition Topologies For Ciik ConvertersDocument6 pagesLK.R, Cuk: Zero-Voltage-Transition Topologies For Ciik ConvertersAnuradha KarmakarNo ratings yet
- Template Version 20181231: Equipment Detail ( ) - Input Details: Low Impedance Differential ProtectionDocument6 pagesTemplate Version 20181231: Equipment Detail ( ) - Input Details: Low Impedance Differential ProtectionGirija Sankar PatiNo ratings yet
- Urrent Steering Logic For Mixed-Signal ApplicationsDocument35 pagesUrrent Steering Logic For Mixed-Signal Applicationsapi-19668941No ratings yet
- Lectures 9 - 10 Voltage Regulators 2019-2Document55 pagesLectures 9 - 10 Voltage Regulators 2019-2Vanderson Xavier vandilolNo ratings yet
- Answers 2Document4 pagesAnswers 2Vika BodokiaNo ratings yet
- Research ProposalDocument2 pagesResearch ProposalAnika AroviNo ratings yet
- Class-5 Unit-5 (Prose) Shabale (Sabala)Document16 pagesClass-5 Unit-5 (Prose) Shabale (Sabala)GKHPS B HOSAHALLINo ratings yet
- Email Etiquettes: Click To Add TextDocument25 pagesEmail Etiquettes: Click To Add Textmanveen kaurNo ratings yet
- Chapter 8Document3 pagesChapter 8JULLIE CARMELLE H. CHATTONo ratings yet
- Makalah Bahasa InggrisDocument7 pagesMakalah Bahasa InggrisRima Novianti100% (1)
- A Summary of The Theories or Concepts About Child Development From Piaget, Vygotsky, Brunner, and Gardner-Zahra Warda Mufidah 183221217Document16 pagesA Summary of The Theories or Concepts About Child Development From Piaget, Vygotsky, Brunner, and Gardner-Zahra Warda Mufidah 183221217Fida100% (1)
- Final Exam For EappDocument2 pagesFinal Exam For EappReychel NecorNo ratings yet
- Komatsu Wb93r 5 Shop ManualDocument20 pagesKomatsu Wb93r 5 Shop Manualsandra100% (32)
- Hill & Jones CH 01Document29 pagesHill & Jones CH 01Ishraque MahmudNo ratings yet
- Life After Ashes: Understanding The Impact of Business Loss To The Livelihood of San Fernando City Wet Market VendorsDocument10 pagesLife After Ashes: Understanding The Impact of Business Loss To The Livelihood of San Fernando City Wet Market Vendorsalrichj29No ratings yet
- Session Nos. 26 - 31: Cities of Mandaluyong and PasigDocument25 pagesSession Nos. 26 - 31: Cities of Mandaluyong and PasigLego AlbertNo ratings yet
- Abstract On Face Recognition TechnologyDocument1 pageAbstract On Face Recognition TechnologyParas Pareek60% (5)
- Density (Unit Weight), Yield, and Air Content (Gravimetric) of ConcreteDocument4 pagesDensity (Unit Weight), Yield, and Air Content (Gravimetric) of ConcretemickyfelixNo ratings yet
- Proton-Halo Breakup DynamicsDocument7 pagesProton-Halo Breakup DynamicsBharat KashyapNo ratings yet
- Diamantina Shire BrochureDocument13 pagesDiamantina Shire BrochurefionaNo ratings yet
- LEPTOSPIRADocument31 pagesLEPTOSPIRADinar NastitiNo ratings yet
- Sciencedirect: Development of Battery Monitoring System in Smart Microgrid Based On Internet of Things (Iot)Document6 pagesSciencedirect: Development of Battery Monitoring System in Smart Microgrid Based On Internet of Things (Iot)KiranNo ratings yet
- DTZZIII User's GuideDocument4 pagesDTZZIII User's GuideDiego BaezNo ratings yet
- 30 Tips For Indesign Users enDocument38 pages30 Tips For Indesign Users enMoo MNo ratings yet
- 302 Decision Science Question - PaperDocument3 pages302 Decision Science Question - Paperajay taleNo ratings yet
- Academic Calendar - ARUDocument5 pagesAcademic Calendar - ARUEmmanuella NnodimNo ratings yet
- MAS2014Document257 pagesMAS2014Nathaly Rojas GonzálezNo ratings yet
- Mathematics 9 DLPDocument10 pagesMathematics 9 DLPAljohaila GulamNo ratings yet
- Test - Reading Explorer 3 8A - QuizletDocument4 pagesTest - Reading Explorer 3 8A - QuizletTatjana Modea SibulNo ratings yet
- Career Guidance WorksheetDocument2 pagesCareer Guidance WorksheetSitti Rohima MarajanNo ratings yet
- CSC-160 Series Numerical Line Protection EquipmentDocument112 pagesCSC-160 Series Numerical Line Protection EquipmentMarkusKunNo ratings yet
- 7931-Article Text-15767-2-10-20191101Document13 pages7931-Article Text-15767-2-10-20191101Fatunde BukolaNo ratings yet
- Venkateshetal 2003Document56 pagesVenkateshetal 2003Gilang KemalNo ratings yet