You might also like
- Merenje Brzine Obrtanja Elektricnih Masina TahometromDocument45 pagesMerenje Brzine Obrtanja Elektricnih Masina Tahometromgox458No ratings yet
- Merni Sistem (Unutrasnji Senzori)Document7 pagesMerni Sistem (Unutrasnji Senzori)Мирослав АлександровићNo ratings yet
- 06 - Obrada Mernih SignalaDocument9 pages06 - Obrada Mernih SignalaIvan IvkovicNo ratings yet
- Uređaji I Uslovi Za Mrenje VibracijeDocument14 pagesUređaji I Uslovi Za Mrenje VibracijeIlija JecmenicaNo ratings yet
- Мерење и управљањеDocument20 pagesМерење и управљањеNenad kontaktNo ratings yet
- СЕНЗОРИDocument2 pagesСЕНЗОРИalekdjNo ratings yet
- Elektromotorni Pogoni Uvod TekstDocument29 pagesElektromotorni Pogoni Uvod TekstPredrag Bond JankovicNo ratings yet
- Elementi Automatizacije 4 DeoDocument5 pagesElementi Automatizacije 4 DeoMarkoNo ratings yet
- Uređaji I Uslovi Za Mrenje VibracijeDocument14 pagesUređaji I Uslovi Za Mrenje VibracijeĐorđe KlisuraNo ratings yet
- Давачи позиције- пример примене на возилимаDocument11 pagesДавачи позиције- пример примене на возилимаJovo PavlovicNo ratings yet
- Senzori Vibracija 2Document11 pagesSenzori Vibracija 2kukuruziNo ratings yet
- Kinematika MAŠINA ALATKIDocument20 pagesKinematika MAŠINA ALATKIHusein LagumdzijaNo ratings yet
- Oprema Za Praćenje VibracijaDocument43 pagesOprema Za Praćenje Vibracijamisapera35No ratings yet
- INDUKTIVNI SENZORI - VezbaDocument7 pagesINDUKTIVNI SENZORI - VezbaBozidarka Uzelac LucicNo ratings yet
- 4 Senzori Polozaja Osa RobotaDocument72 pages4 Senzori Polozaja Osa RobotaDragan LazicNo ratings yet
- Давачи позицијеDocument13 pagesДавачи позицијеJovo PavlovicNo ratings yet
- Merni Pretvarači BrzineDocument2 pagesMerni Pretvarači Brzinevlade82No ratings yet
- UntitledDocument19 pagesUntitledMiljan MirkovicNo ratings yet
- Сензори убрзањаDocument19 pagesСензори убрзањаJovo PavlovicNo ratings yet
- EMP1 Zbirka Asinhrone MasineDocument46 pagesEMP1 Zbirka Asinhrone MasineblaagicaNo ratings yet
- CNC PR 4 Pogonski SitemiDocument60 pagesCNC PR 4 Pogonski Sitemivekas859No ratings yet
- Mehatronički AutomobilskiDocument9 pagesMehatronički Automobilskilaza mankiNo ratings yet
- Mehatronika Vozila - SenzoriDocument26 pagesMehatronika Vozila - SenzoriVuković Jovan100% (4)
- 01 - Automatski Menjac 1Document13 pages01 - Automatski Menjac 1Dušan TijanićNo ratings yet
- Senzori U Automobilu - Vladica Sinadinovic 12023Document17 pagesSenzori U Automobilu - Vladica Sinadinovic 12023MilomirJapundzicNo ratings yet
- Maturski Rad ElektrotehnikaDocument29 pagesMaturski Rad ElektrotehnikaСтоле БлагојевићNo ratings yet
- Одговори на питања за тест из МерењаDocument29 pagesОдговори на питања за тест из МерењаPajkan MenNo ratings yet
- Programsko Upravljanje Masinama3Document64 pagesProgramsko Upravljanje Masinama3Ivana RendulicNo ratings yet
- Podešavanje Ugla PretpaljenjaDocument9 pagesPodešavanje Ugla PretpaljenjajaNo ratings yet
- FTM - Prezentacija 6 - Merenje Pozicije, Pomeraja I NivoaDocument46 pagesFTM - Prezentacija 6 - Merenje Pozicije, Pomeraja I NivoaDragan LazicNo ratings yet
- Podela Sistema Za Paljenje I Kontrola DavačaDocument5 pagesPodela Sistema Za Paljenje I Kontrola DavačaAndrej Marina Zoran MiloševićNo ratings yet
- Monitoring I Dijagnostika El - Masina-Prezentacija PredmetaDocument28 pagesMonitoring I Dijagnostika El - Masina-Prezentacija PredmetaJasmin SmajićNo ratings yet
- 04-Radne Karakteristike Motora SUSDocument25 pages04-Radne Karakteristike Motora SUSВеснаПоповићNo ratings yet
- Primena Asinhronih Motora U Električnoj VučiDocument33 pagesPrimena Asinhronih Motora U Električnoj VučiAleksandar IlićNo ratings yet
- Osnove Buke I Vibracija 4 PDFDocument57 pagesOsnove Buke I Vibracija 4 PDFMinaVoinovicNo ratings yet
- APL SeminarskiDocument37 pagesAPL SeminarskiSladjan Sava SavićNo ratings yet
- Seminarski Rad - Regulatori Napona Vrste I NamenaDocument14 pagesSeminarski Rad - Regulatori Napona Vrste I NamenaMrzitedakucasam Seminarski,Diplomski radoviNo ratings yet
- Način Rada Jednofaznog Asinhronog Motora 2013Document11 pagesNačin Rada Jednofaznog Asinhronog Motora 2013SelwaMusićNo ratings yet
- 9.pretvarači Brzine ObrtanjaDocument1 page9.pretvarači Brzine ObrtanjaSanja DejanovicNo ratings yet
- Obrada I Prenos Mernih Signala oDocument10 pagesObrada I Prenos Mernih Signala oIvan NikolicNo ratings yet
- Uvodni DeoDocument13 pagesUvodni DeoPerica PaunovićNo ratings yet
- Senzori PomjerajaDocument14 pagesSenzori PomjerajaatijaNo ratings yet
- Frekventni Regulatori AMDocument82 pagesFrekventni Regulatori AMZBojanic100% (1)
- Tehnika Merenja I Senzori - Kalibracija Sondi - LaboratorijaDocument13 pagesTehnika Merenja I Senzori - Kalibracija Sondi - LaboratorijaMarkoNo ratings yet
- Tahometarski GeneratoriDocument4 pagesTahometarski GeneratoriMihajlo SimicNo ratings yet
- 5 Talasovod I Prenos Radarskih PodatakaDocument1 page5 Talasovod I Prenos Radarskih PodatakaAnamarija SpasojevicNo ratings yet
- Elementi AutomatizacijeDocument6 pagesElementi Automatizacijem.makevic06No ratings yet
- Geodezija - Totalna StanicaDocument22 pagesGeodezija - Totalna StanicaPredrag ZivkovicNo ratings yet
- Ekventni RegulatoriDocument15 pagesEkventni Regulatoriandrejacvetkovic7No ratings yet
- Dijagnostika MasinaDocument47 pagesDijagnostika Masinanemanjaig0% (1)
- Koracni Motori OdgovoriDocument5 pagesKoracni Motori OdgovoriFilipFilipNo ratings yet
- Технички Услови За Бројила Електричне Енергије И Gprs МодемеDocument16 pagesТехнички Услови За Бројила Електричне Енергије И Gprs МодемеćićkoNo ratings yet
- 2013 T50 Prilog9 4Document16 pages2013 T50 Prilog9 4ćićkoNo ratings yet
- Merenje Obrtnog MomentaDocument2 pagesMerenje Obrtnog MomentarankagNo ratings yet
- Фреквентни регулаториDocument14 pagesФреквентни регулаториbojanNo ratings yet
- Давачи притискаDocument32 pagesДавачи притискаJovo PavlovicNo ratings yet
- Сензори убрзањаDocument19 pagesСензори убрзањаJovo PavlovicNo ratings yet
- Давачи позиције- пример примене на возилимаDocument11 pagesДавачи позиције- пример примене на возилимаJovo PavlovicNo ratings yet
- Давачи позицијеDocument13 pagesДавачи позицијеJovo PavlovicNo ratings yet
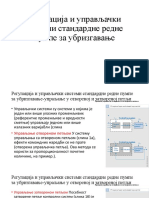
- 9. Регулација и управљачки системи стандардне редне пумпе заDocument16 pages9. Регулација и управљачки системи стандардне редне пумпе заJovo PavlovicNo ratings yet
- mon Reil нископритисна странаDocument11 pagesmon Reil нископритисна странаJovo PavlovicNo ratings yet
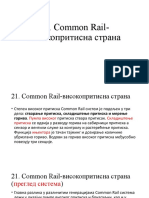
- 21. Common rail високопритисна странаDocument40 pages21. Common rail високопритисна странаJovo PavlovicNo ratings yet
- 23. Дијагностика системаDocument8 pages23. Дијагностика системаJovo PavlovicNo ratings yet
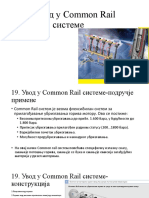
- 19. Увод у Common Rail системеDocument38 pages19. Увод у Common Rail системеJovo PavlovicNo ratings yet
- 25.Емисија издувних гасоваDocument33 pages25.Емисија издувних гасоваJovo PavlovicNo ratings yet
- 22. Електронска контрола рада мотораDocument30 pages22. Електронска контрола рада мотораJovo PavlovicNo ratings yet
- 5 Основни принципи код убризгавања горива- формирање смешеDocument23 pages5 Основни принципи код убризгавања горива- формирање смешеJovo PavlovicNo ratings yet
- 8. Стандардне редне пумпе за убризгавањеDocument35 pages8. Стандардне редне пумпе за убризгавањеJovo PavlovicNo ratings yet
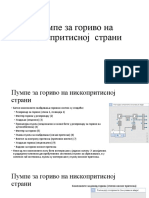
- 7. Пумпе за гориво на нископритисној страниDocument20 pages7. Пумпе за гориво на нископритисној страниJovo PavlovicNo ratings yet
- Електромагнетни вентилиDocument17 pagesЕлектромагнетни вентилиJovo PavlovicNo ratings yet
- 4 Системи за контролу пуњења цилиндараDocument41 pages4 Системи за контролу пуњења цилиндараJovo PavlovicNo ratings yet
- Индукциони калемиDocument30 pagesИндукциони калемиJovo PavlovicNo ratings yet
- Тест из историје Стари истокDocument2 pagesТест из историје Стари истокJovo Pavlovic100% (5)
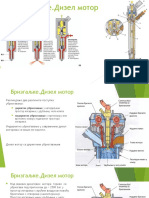
- Бризгаљке.Дизел моторDocument33 pagesБризгаљке.Дизел моторJovo PavlovicNo ratings yet
- Извршни елементи (актуатори)Document13 pagesИзвршни елементи (актуатори)Jovo PavlovicNo ratings yet
- Тест из историје Стари исток БDocument2 pagesТест из историје Стари исток БJovo Pavlovic100% (1)
- Test V Star GrckaDocument5 pagesTest V Star GrckaJovo PavlovicNo ratings yet