You might also like
- Modular Forms and Special Cycles on Shimura Curves. (AM-161)From EverandModular Forms and Special Cycles on Shimura Curves. (AM-161)No ratings yet
- Optimizing Temperature Control ProcessDocument9 pagesOptimizing Temperature Control ProcessMuhlisRifa'iNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Data Pengamatan dan Pengolahan data Karakteristik Dinamik Sistem Kontrol SuhuDocument6 pagesData Pengamatan dan Pengolahan data Karakteristik Dinamik Sistem Kontrol SuhuAnonymous vjTWskvNo ratings yet
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- PID controller tuning experiments for temperature control systemDocument14 pagesPID controller tuning experiments for temperature control systemindriani deboraNo ratings yet
- Appendiks: Tipe Pengendali P PI PIDDocument2 pagesAppendiks: Tipe Pengendali P PI PIDMiraNo ratings yet
- Control System Design - QFT: Bo Bernhardsson, K. J. ÅströmDocument54 pagesControl System Design - QFT: Bo Bernhardsson, K. J. ÅströmGabriel LNo ratings yet
- Metodo Volumetrico Calculo Del OOIP (Ni) : Universidad de Aquino Bolivia Sede:Santa CruzDocument12 pagesMetodo Volumetrico Calculo Del OOIP (Ni) : Universidad de Aquino Bolivia Sede:Santa CruzdayanaNo ratings yet
- Operating System I Assignment # 3: CPU Schedulers SimulatorDocument5 pagesOperating System I Assignment # 3: CPU Schedulers Simulatornada abdelrahmanNo ratings yet
- 2 - Introduction To Nodal AnalysisDocument20 pages2 - Introduction To Nodal AnalysisLuis Marcio AvendañoNo ratings yet
- L12prob Plan2 04Document50 pagesL12prob Plan2 04eviroyerNo ratings yet
- Course Pansystem InterpretationDocument59 pagesCourse Pansystem InterpretationPittymimi Petite100% (1)
- HW 3Document2 pagesHW 3الحمزه حبيبNo ratings yet
- Lug Design (XLS)Document4 pagesLug Design (XLS)Bhartendu Patni100% (1)
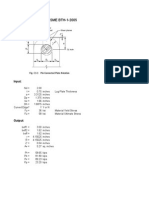
- Lug Design R4, ASME BTH-1Document4 pagesLug Design R4, ASME BTH-1chuckhsu1248No ratings yet
- Well Test Analysis - Math + Data + Python CodeDocument10 pagesWell Test Analysis - Math + Data + Python CodeAllah bakhsh BakhshNo ratings yet
- Os Past Papers' Solutions 2017Document4 pagesOs Past Papers' Solutions 2017zainab tehreemNo ratings yet
- Note: Attempt Four Questions Only: Q3: A 9000 Ft. Well Produces 0.7 SP.G of Oil Above The Bubble Point. PI 0.5, PRDocument2 pagesNote: Attempt Four Questions Only: Q3: A 9000 Ft. Well Produces 0.7 SP.G of Oil Above The Bubble Point. PI 0.5, PRtariq82aliNo ratings yet
- Solutions RegressionTutorialDocument51 pagesSolutions RegressionTutorialARBIN RAJNo ratings yet
- Pressure Drawdown AnalysisDocument14 pagesPressure Drawdown AnalysisSyed DzafeerNo ratings yet
- Quadratic Bezier Offsetting With Selective SubdivisionDocument10 pagesQuadratic Bezier Offsetting With Selective SubdivisionP_A_INo ratings yet
- Lifting Lug Design Per ASME BTH-1-2005: InputDocument4 pagesLifting Lug Design Per ASME BTH-1-2005: InputcoolkaisyNo ratings yet
- Class Interval (F) (X) (FX)Document3 pagesClass Interval (F) (X) (FX)Rose Medina BarondaNo ratings yet
- Responsi Antek Pbu 2: Nama: Heriyanto (113160053) Tanggal: 9 April 2019 Kelas: D Dosen: Ir. Bambang Bintarto, MTDocument4 pagesResponsi Antek Pbu 2: Nama: Heriyanto (113160053) Tanggal: 9 April 2019 Kelas: D Dosen: Ir. Bambang Bintarto, MTdekanNo ratings yet
- 4.2Document19 pages4.2yogitapatilx12No ratings yet
- EE 351 Spring 2021 Homework 6 SolutionsDocument21 pagesEE 351 Spring 2021 Homework 6 SolutionsKalenNo ratings yet
- Assignment 2 FBDocument13 pagesAssignment 2 FBNoorbazilah AbdullahNo ratings yet
- HW3Document4 pagesHW3Taoran LiNo ratings yet
- Bumanlag, Paul Brian J. Cbet 19-503P Percentiles, Quartiles and Deciles For Grouped DataDocument2 pagesBumanlag, Paul Brian J. Cbet 19-503P Percentiles, Quartiles and Deciles For Grouped DataPaul Brian BumanlagNo ratings yet
- Exercise Hipotesa Mean GSLCDocument2 pagesExercise Hipotesa Mean GSLCNurul HidayatNo ratings yet
- Round Robin Gantt Chart and Process TimesDocument2 pagesRound Robin Gantt Chart and Process Times黄佩珺No ratings yet
- Pitman SolutionDocument190 pagesPitman SolutionBon Siranart50% (2)
- Review Analisis: Tabel 2. Variabel Dan Respon PenelitianDocument8 pagesReview Analisis: Tabel 2. Variabel Dan Respon PenelitianheraNo ratings yet
- 4.3RRDocument13 pages4.3RRyogitapatilx12No ratings yet
- Chapter 17 - Sampling and Estimation: Solutions To Exercise 17ADocument14 pagesChapter 17 - Sampling and Estimation: Solutions To Exercise 17AAnonymous 69No ratings yet
- Fundamentals of Primary Hydrocarbon Recovery Exam KeyDocument7 pagesFundamentals of Primary Hydrocarbon Recovery Exam KeyEdward ZhouNo ratings yet
- Signal Design Experiment AnalysisDocument2 pagesSignal Design Experiment AnalysisAkash GuptaNo ratings yet
- Pizza assembly line optimizationDocument8 pagesPizza assembly line optimizationAngeliePanerioGonzagaNo ratings yet
- College of Engineering and Food Science: Central Bicol State University of AgricultureDocument3 pagesCollege of Engineering and Food Science: Central Bicol State University of Agriculturelaurence Dave BelasonNo ratings yet
- Calculo de Curvas Horizontales Curva 1 Datos: Punto Cadenamientodefleccion Cuerda AcumuladoDocument3 pagesCalculo de Curvas Horizontales Curva 1 Datos: Punto Cadenamientodefleccion Cuerda AcumuladoEnrique NavaNo ratings yet
- MATHENIKDocument10 pagesMATHENIKAna Victoria GonzalesNo ratings yet
- Pressure Buildup Test Data Analysis and Skin Factor EstimationDocument10 pagesPressure Buildup Test Data Analysis and Skin Factor Estimationسحر سلامتیانNo ratings yet
- Answer Key For Practice Questions For Midterm ExamDocument4 pagesAnswer Key For Practice Questions For Midterm ExamhanaNo ratings yet
- Volume of triangular pyramid regularDocument5 pagesVolume of triangular pyramid regularDaniela ChicaizaNo ratings yet
- RR Arrival TimeDocument2 pagesRR Arrival TimekiranNo ratings yet
- MomentConnection 1aDocument1 pageMomentConnection 1aKrishnaNo ratings yet
- Newest NewDocument4 pagesNewest NewzakiNo ratings yet
- PERCENTILES GroupedDocument10 pagesPERCENTILES GroupedBea MagsombolNo ratings yet
- Chapter 9: Design Via Root Locus ContDocument16 pagesChapter 9: Design Via Root Locus ContarifulNo ratings yet
- Poisson Distribution Models Traffic FlowDocument9 pagesPoisson Distribution Models Traffic FlowfaisalasgharNo ratings yet
- Ak 2Document4 pagesAk 2Bubbly BunnyNo ratings yet
- 2210achieverivmazs 165958 Test Sol 0baotuglskDocument6 pages2210achieverivmazs 165958 Test Sol 0baotuglskarjungaur063No ratings yet
- Statistika: Dosen PengajarDocument7 pagesStatistika: Dosen PengajarMuhammadRaihanNo ratings yet
- CSC 1016 Operating System Second AssignmentDocument7 pagesCSC 1016 Operating System Second AssignmentAchyut NeupaneNo ratings yet
- Thermodynamic Fundamentals (8 Points)Document13 pagesThermodynamic Fundamentals (8 Points)ch MuzammalNo ratings yet
- LampDocument62 pagesLampWeldy PuteraNo ratings yet
- Harga Bahan BakuDocument1 pageHarga Bahan BakuWeldy PuteraNo ratings yet
- Pengendalian Level (Level Control) : Pelaksanaan PraktikumDocument5 pagesPengendalian Level (Level Control) : Pelaksanaan PraktikumWeldy PuteraNo ratings yet
- Ayam PDFDocument11 pagesAyam PDFshimaNo ratings yet
- The Prosecutor's HandbookDocument162 pagesThe Prosecutor's HandbooksamuelNo ratings yet
- International Journal of Plasticity: Dong Phill Jang, Piemaan Fazily, Jeong Whan YoonDocument17 pagesInternational Journal of Plasticity: Dong Phill Jang, Piemaan Fazily, Jeong Whan YoonGURUDAS KARNo ratings yet
- Nse3 FortiClient Quiz Attempt Review - CopieDocument4 pagesNse3 FortiClient Quiz Attempt Review - Copieking jumper343100% (1)
- CW3 - 4Document2 pagesCW3 - 4Rigel Zabate100% (1)
- Normalization Castuera BSCS2CDocument8 pagesNormalization Castuera BSCS2CRichard, Jr. CastueraNo ratings yet
- Rotating EquipmentDocument3 pagesRotating EquipmentSathish DesignNo ratings yet
- EE370 L1 IntroductionDocument38 pagesEE370 L1 IntroductionAnshul GoelNo ratings yet
- Artificial IntelligenceDocument4 pagesArtificial IntelligencePrax DNo ratings yet
- Basf TapesDocument3 pagesBasf TapesZoran TevdovskiNo ratings yet
- Toaz - Info Module in Ergonomics and Planning Facilities For The Hospitality Industry PRDocument33 pagesToaz - Info Module in Ergonomics and Planning Facilities For The Hospitality Industry PRma celine villoNo ratings yet
- RTD Temperature Transmitter Calibration Report TemplateDocument1 pageRTD Temperature Transmitter Calibration Report TemplateSuswantoro ToroNo ratings yet
- Government of West Bengal Ration Card DetailsDocument1 pageGovernment of West Bengal Ration Card DetailsGopal SarkarNo ratings yet
- Trimapanel® Brochure PDFDocument36 pagesTrimapanel® Brochure PDFyasserNo ratings yet
- Event Management Study Material Free PDFDocument2 pagesEvent Management Study Material Free PDFKim0% (1)
- Nitro - Quiz 3 Ged102-A13Document3 pagesNitro - Quiz 3 Ged102-A13Eliezer NitroNo ratings yet
- Gliffy Public Diagram - ATM FlowchartDocument3 pagesGliffy Public Diagram - ATM Flowchartmy nNo ratings yet
- Indian Pharmaceutical Industry: The Changing Dynamics: April 2016Document26 pagesIndian Pharmaceutical Industry: The Changing Dynamics: April 2016payal joshiNo ratings yet
- GATE Previous Year Solved Papers CSDocument152 pagesGATE Previous Year Solved Papers CSNagaraja Rao100% (1)
- TD102 Conductor - Standard ConductorsDocument2 pagesTD102 Conductor - Standard ConductorsHFandino1No ratings yet
- Analysis and Design of BeamsDocument12 pagesAnalysis and Design of BeamsHasanain AlmusawiNo ratings yet
- Consultants DirectoryDocument36 pagesConsultants DirectoryAnonymous yjLUF9gDTSNo ratings yet
- Hydraulic Shovel: Engine BucketDocument32 pagesHydraulic Shovel: Engine BucketJulio CRNo ratings yet
- Engine Tune-UpDocument43 pagesEngine Tune-UpЮра ПетренкоNo ratings yet
- C-TECC Principles Guide TECC EducationDocument4 pagesC-TECC Principles Guide TECC EducationDavid Sepulveda MirandaNo ratings yet
- 5 Short MustWatch Motivational Videos For TeachersrccymDocument4 pages5 Short MustWatch Motivational Videos For Teachersrccymfoxpeak8No ratings yet
- Research On HIBADocument9 pagesResearch On HIBAPixel GeekNo ratings yet
- Nikita Rajput: Anchor/Host/Master of CeremoniesDocument21 pagesNikita Rajput: Anchor/Host/Master of CeremoniesnamanNo ratings yet
- Hcin 543 Entity Relationship Diagram For Diabetes DataDocument4 pagesHcin 543 Entity Relationship Diagram For Diabetes Dataapi-534036919No ratings yet
- Principles of Marketing Handout 4: Marketing Opportunity and Consumer AnalysisDocument19 pagesPrinciples of Marketing Handout 4: Marketing Opportunity and Consumer AnalysisAsset Dy100% (1)
- Tipster Job AdvertDocument3 pagesTipster Job AdvertDatateq ConsultancyNo ratings yet