You might also like
- Chapter 1 - Introduction To Machinery Principles (Part 1 of 3)Document26 pagesChapter 1 - Introduction To Machinery Principles (Part 1 of 3)jessiesiawNo ratings yet
- Electrical Machines: CM3 - DC MachineDocument73 pagesElectrical Machines: CM3 - DC Machinemeassarak0No ratings yet
- EE-260 Lecture 14 To 16 AC MachineryDocument50 pagesEE-260 Lecture 14 To 16 AC MachineryRehan BasharatNo ratings yet
- UNIT-III DC MachinesDocument29 pagesUNIT-III DC MachinesK PushyanthNo ratings yet
- Mechatronics RVKL Y1 S5 ElectricalMotorsDocument35 pagesMechatronics RVKL Y1 S5 ElectricalMotorsVenkat SaiNo ratings yet
- Unit III Evhv DC MotorsDocument56 pagesUnit III Evhv DC MotorsRajesh BhaskarlaNo ratings yet
- Introduction To Machinery Principles: Mochammad Ariyanto, ST, MTDocument31 pagesIntroduction To Machinery Principles: Mochammad Ariyanto, ST, MTutsmanheruNo ratings yet
- Electrical Machines I: Week 3-4: Direct Current GeneratorDocument18 pagesElectrical Machines I: Week 3-4: Direct Current Generatorkaloy33No ratings yet
- EE-260 : Electrical Machines Lecture#16Document23 pagesEE-260 : Electrical Machines Lecture#16Shafaq TauqirNo ratings yet
- En - Introduction To Electric Motors Pres PDFDocument56 pagesEn - Introduction To Electric Motors Pres PDFDalawa BenteNo ratings yet
- Ac & DC Drives: SUB CODE: 22538 THEORY:70 + 10 + 20 PRACTICAL: 25 + 25 TOTAL: 150Document62 pagesAc & DC Drives: SUB CODE: 22538 THEORY:70 + 10 + 20 PRACTICAL: 25 + 25 TOTAL: 150narayanNo ratings yet
- BEEE Unit-2Document69 pagesBEEE Unit-2Logapriya RameshNo ratings yet
- DC and AC Machines FundamentalsDocument115 pagesDC and AC Machines Fundamentalsaman khanNo ratings yet
- DC Machines FundamentalsDocument37 pagesDC Machines FundamentalsAgustinBenedictoNo ratings yet
- ET Lecture On 04-05-2021Document24 pagesET Lecture On 04-05-2021balajiNo ratings yet
- Vtu Edusat Programme: 20: SUB: Basic Electrical Engineering (15ELE15/25)Document52 pagesVtu Edusat Programme: 20: SUB: Basic Electrical Engineering (15ELE15/25)Stephanie ParkNo ratings yet
- DC Machine (Pharos) PDFDocument124 pagesDC Machine (Pharos) PDFShailendra Singh KustwarNo ratings yet
- EE-260 Lecture 02 13th Sep 2022Document32 pagesEE-260 Lecture 02 13th Sep 2022Wahab HassanNo ratings yet
- Analog Sensors For Motion Measurement: Presented By: Chinmay PimpalkhareDocument38 pagesAnalog Sensors For Motion Measurement: Presented By: Chinmay PimpalkhareM KEERTHIKANo ratings yet
- DC MOTOR PRINCIPLESDocument54 pagesDC MOTOR PRINCIPLESGerard AlfonsoNo ratings yet
- DC Motor ProjectDocument18 pagesDC Motor ProjectUnicorn UnicornNo ratings yet
- DC Motor1 SolnDocument4 pagesDC Motor1 SolnGlazylynCortezPalo60% (5)
- Chapter 2Document27 pagesChapter 2Ag De Santos Jr.No ratings yet
- Topic 2. DC Machines Part II - DC Motor 2019Document75 pagesTopic 2. DC Machines Part II - DC Motor 2019Lim Kai XuanNo ratings yet
- 10 PPT Motor Principle & DC MotorDocument38 pages10 PPT Motor Principle & DC Motorvysakh p vNo ratings yet
- Inductors and Display DevicesDocument65 pagesInductors and Display DevicesRAJIV SINGHNo ratings yet
- Understand How DC Motors WorkDocument58 pagesUnderstand How DC Motors WorkGerard AlfonsoNo ratings yet
- Chapter # 4 AC Machinery FundamentalsDocument27 pagesChapter # 4 AC Machinery FundamentalsSamiNo ratings yet
- ET Unit 5 Part 1Document22 pagesET Unit 5 Part 1Sumit JhaNo ratings yet
- DC Machine (Pharos)Document135 pagesDC Machine (Pharos)Tesla ENo ratings yet
- Notes Chap#17 Engr Farrukh Tahir Telecommunication EngineerDocument3 pagesNotes Chap#17 Engr Farrukh Tahir Telecommunication EngineerFarrukh TahirNo ratings yet
- 23-Electromagnetic Induction-OrigDocument79 pages23-Electromagnetic Induction-Origrodel.verzosaNo ratings yet
- Magnetic Circuits, Energy Conversion and Three Phase TheoryDocument88 pagesMagnetic Circuits, Energy Conversion and Three Phase Theoryn02219827hNo ratings yet
- MagnetismDocument4 pagesMagnetismTalha MughalNo ratings yet
- DC Generator Lec 2Document21 pagesDC Generator Lec 2Ena Leanica DelgadoNo ratings yet
- CT 2 Answer KeyDocument7 pagesCT 2 Answer KeyAnirudhh RaviNo ratings yet
- Mechatronics Lab ME 140L: DC MotorsDocument14 pagesMechatronics Lab ME 140L: DC MotorsGrant GeorgiaNo ratings yet
- ELL 100 Introduction To Electrical Engineering: Ecture Lectromechanical Nergy OnversionDocument60 pagesELL 100 Introduction To Electrical Engineering: Ecture Lectromechanical Nergy OnversionmwasahaNo ratings yet
- Bahir Dar University Technology of Institute: School of Computing and Electrical EngineeringDocument55 pagesBahir Dar University Technology of Institute: School of Computing and Electrical Engineeringkrishnareddy_chintala0% (1)
- Lecture - 5 AC Machinary FundamentalsDocument58 pagesLecture - 5 AC Machinary FundamentalsutsmanheruNo ratings yet
- Basic ElectricityDocument79 pagesBasic Electricityalex545No ratings yet
- DC Machine-1Document37 pagesDC Machine-1faqhrulNo ratings yet
- Electrical EngineeringDocument66 pagesElectrical EngineeringSuTtA OPNo ratings yet
- DC MachinesDocument52 pagesDC MachinesArun Kumar100% (1)
- Lec 1 Introduction 19 Series EEE 2205Document22 pagesLec 1 Introduction 19 Series EEE 2205Nasif TahmidNo ratings yet
- The Working Principles of AC Machines Can Be Explained Based On The Specific Type of AC MachineDocument2 pagesThe Working Principles of AC Machines Can Be Explained Based On The Specific Type of AC MachineSaurabh BhandariNo ratings yet
- DC MACHINES MotorDocument21 pagesDC MACHINES MotorveeranjaneyulugopuNo ratings yet
- Chapter 4 DC MachinesDocument80 pagesChapter 4 DC MachinesKorsa KorsaNo ratings yet
- Electromagnetism NotesDocument10 pagesElectromagnetism NotesVarenayam editzNo ratings yet
- Principle of Synchcronous MotorDocument3 pagesPrinciple of Synchcronous MotorPHÁT NGUYỄN THẾNo ratings yet
- Fundamentals of Electrical Machines: Transformer and DC Motor PrinciplesDocument91 pagesFundamentals of Electrical Machines: Transformer and DC Motor PrinciplesVimal KunwarNo ratings yet
- WTS 12 ElectrodynamicsDocument28 pagesWTS 12 ElectrodynamicsTondani100% (1)
- NPTEL Electrical Machines -II SyllabusDocument4 pagesNPTEL Electrical Machines -II SyllabusThakur Pranav Kumar GautamNo ratings yet
- DC Machines: Types and WorkingDocument5 pagesDC Machines: Types and WorkingMousumiNo ratings yet
- ECE Electrical Engineering 2 Marks PDFDocument22 pagesECE Electrical Engineering 2 Marks PDFsivagamiNo ratings yet
- DC Machines GuideDocument54 pagesDC Machines GuideAshutosh KushwahaNo ratings yet
- Chapter 5 (Synchoronous Machine)Document71 pagesChapter 5 (Synchoronous Machine)eyoule abdiNo ratings yet
- ECNG-4010 Lecture 05Document37 pagesECNG-4010 Lecture 05Abel BatuNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- PID LeanDocument4 pagesPID Leannhu@nhuNo ratings yet
- Servo Motor'S Instruction Manual For Hydraulic SystemDocument12 pagesServo Motor'S Instruction Manual For Hydraulic Systembbrean14No ratings yet
- PTC130 30Document1 pagePTC130 30nhu@nhuNo ratings yet
- 5000 5020 EncoderDocument9 pages5000 5020 Encodernhu@nhuNo ratings yet
- Md290 Advance Manual B00Document350 pagesMd290 Advance Manual B00nhu@nhuNo ratings yet
- H5U IntroduceDocument14 pagesH5U Introducenhu@nhuNo ratings yet
- Entrance Test MSSTDocument2 pagesEntrance Test MSSTnhu@nhuNo ratings yet
- Science 10 - Q1 - W5 - D2Document1 pageScience 10 - Q1 - W5 - D2zenaida a academiaNo ratings yet
- Web Browsing and Communication NotesDocument19 pagesWeb Browsing and Communication NotesRahul PandeyNo ratings yet
- SheetMetal Bend Allowance GuideDocument3 pagesSheetMetal Bend Allowance GuidesunilbholNo ratings yet
- SEBI Claim Form Details for Shukul Wealth AdvisoryDocument3 pagesSEBI Claim Form Details for Shukul Wealth Advisoryandrew punekarNo ratings yet
- Discover Haxeflixel FullDocument182 pagesDiscover Haxeflixel FullKristian Macanga100% (3)
- Entrepreneurship & New Venture Management 6e - Chapter 1Document19 pagesEntrepreneurship & New Venture Management 6e - Chapter 1Hlulani Decision50% (2)
- CSC V CADocument2 pagesCSC V CAAllen GrajoNo ratings yet
- Introduction, Concepts, Scope of Community Health NursingDocument32 pagesIntroduction, Concepts, Scope of Community Health Nursingmuthukumar82% (28)
- Gmail - DFA Passport Appointment System - Confirmation Notification PDFDocument2 pagesGmail - DFA Passport Appointment System - Confirmation Notification PDFGarcia efrilNo ratings yet
- Green Economy in The Transport SectorDocument138 pagesGreen Economy in The Transport Sectorclayton MaramwidzeNo ratings yet
- Power Engineering May 2013Document95 pagesPower Engineering May 2013Portal studentesc - EnergeticaNo ratings yet
- Walmart Drug ListDocument6 pagesWalmart Drug ListShirley Pigott MDNo ratings yet
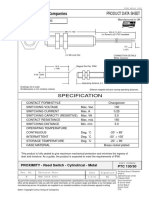
- Optex Vibro DatasheetDocument2 pagesOptex Vibro DatasheetGabriel ChiriacNo ratings yet
- University of The Cordilleras Process CostingDocument5 pagesUniversity of The Cordilleras Process CostingJane PadillaNo ratings yet
- Week 05 Simulation Using GPSS (1) NEWDocument59 pagesWeek 05 Simulation Using GPSS (1) NEWPutriska RazaniNo ratings yet
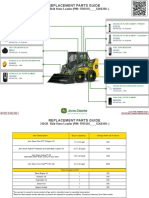
- 312GR Skid Steer Loader PIN 1T0312G G366358 Replacement Parts GuideDocument3 pages312GR Skid Steer Loader PIN 1T0312G G366358 Replacement Parts GuideNelson Andrade VelasquezNo ratings yet
- Final Investigative Report - MaSUDocument4 pagesFinal Investigative Report - MaSUinforumdocsNo ratings yet
- SA-10/20 User ManualDocument31 pagesSA-10/20 User ManualJorgeLuis Anaya NúñezNo ratings yet
- Cloze Test For The Upcoming SSC ExamsDocument9 pagesCloze Test For The Upcoming SSC ExamsAbhisek MishraNo ratings yet
- SSL: Smart Street Lamp Based On Fog Computing.: GUIDE: Asst. Prof. Haseena ADocument21 pagesSSL: Smart Street Lamp Based On Fog Computing.: GUIDE: Asst. Prof. Haseena ATeenaNo ratings yet
- Saving Your Work in MATLAB: Saving Data and The Contents of The Command WindowDocument2 pagesSaving Your Work in MATLAB: Saving Data and The Contents of The Command WindowMakhdoom Ibad HashmiNo ratings yet
- Financial Markets (Chapter 9)Document2 pagesFinancial Markets (Chapter 9)Kyla Dayawon100% (1)
- Magnetic Particle TestDocument4 pagesMagnetic Particle TestHarry Doble100% (1)
- Modern Coating Additives for SustainabilityDocument8 pagesModern Coating Additives for Sustainabilitynano100% (1)
- 20NCT2 1784 SampleDocument12 pages20NCT2 1784 Samplekimjohn dejesusNo ratings yet
- 11.30 Imran Akram IA CementDocument12 pages11.30 Imran Akram IA CementParamananda SinghNo ratings yet
- Sk200-8 Sk210lc-8 Super AsiaDocument16 pagesSk200-8 Sk210lc-8 Super AsiaAnwar Rashid86% (7)
- BABOK V3 10. Glossary PDFDocument16 pagesBABOK V3 10. Glossary PDFAakash ChhibberNo ratings yet
- 410 09e Checkliste For Assessment 13485 MDDDocument51 pages410 09e Checkliste For Assessment 13485 MDDeko Setyawan100% (1)
- Esp Module 4Document34 pagesEsp Module 4ELLEN B.SINAHONNo ratings yet