You might also like
- Chapter - 2 Niladri Sarkar PDFDocument34 pagesChapter - 2 Niladri Sarkar PDFAman BhatiaNo ratings yet
- D Alemberts PrincipleDocument16 pagesD Alemberts PrincipleB.ARVIND B.ARVINDNo ratings yet
- Chapter - 3 Niladri Sarkar PDFDocument48 pagesChapter - 3 Niladri Sarkar PDFAman BhatiaNo ratings yet
- Lithography M3 PDFDocument22 pagesLithography M3 PDFdajNo ratings yet
- Column Slides - Chapter 9Document17 pagesColumn Slides - Chapter 9DHRUV KAMATNo ratings yet
- Chapter 2Document38 pagesChapter 2radhika100% (1)
- ME G641 Theory of Elasticity and Plasticity: BITS PilaniDocument10 pagesME G641 Theory of Elasticity and Plasticity: BITS Pilanimanas batraNo ratings yet
- 7-Ion Implantation 2 Upload PDFDocument70 pages7-Ion Implantation 2 Upload PDFRishabhNo ratings yet
- BITS Pilani: INSTR F311: Electronic Instruments and Instrumentation Technology Analog MetersDocument66 pagesBITS Pilani: INSTR F311: Electronic Instruments and Instrumentation Technology Analog MetersNiharikaNo ratings yet
- Interphase Mass TransferDocument55 pagesInterphase Mass TransferRishab SrivatsaNo ratings yet
- Applied Thermodynamics: BITS PilaniDocument24 pagesApplied Thermodynamics: BITS PilaniAnmol BansalNo ratings yet
- Lecture 13 (27-09-2022)Document24 pagesLecture 13 (27-09-2022)Harshil PatelNo ratings yet
- Ion ImplanantationDocument38 pagesIon ImplanantationRishabhNo ratings yet
- CHE F243 Chap 6 - Mechanical Properties of MetalsDocument38 pagesCHE F243 Chap 6 - Mechanical Properties of Metalsf20221442No ratings yet
- INTERPHASE MASS TRANSFERDocument58 pagesINTERPHASE MASS TRANSFERParitosh Chaudhary0% (1)
- Chap 3 (I)Document65 pagesChap 3 (I)Devayush ShuklaNo ratings yet
- Lithography & Etching TechniquesDocument68 pagesLithography & Etching TechniquesRishabhNo ratings yet
- Metal Forming & Machining (MF F313) : BITS PilaniDocument54 pagesMetal Forming & Machining (MF F313) : BITS PilaniNavkar MehtaNo ratings yet
- Differential Amplifier GuideDocument167 pagesDifferential Amplifier GuideUMESH DHANDENo ratings yet
- Latches and Flip Flops GuideDocument25 pagesLatches and Flip Flops GuideWaiz KhanNo ratings yet
- Electrostatic Fields ModuleDocument29 pagesElectrostatic Fields ModuleGeetansh MehtaNo ratings yet
- Lecture 5 23082023Document20 pagesLecture 5 23082023ihateniggersNo ratings yet
- MD Lecture 1 - Intro To MDDocument19 pagesMD Lecture 1 - Intro To MDADITYA VERMANo ratings yet
- Dyn-EP-c-phai-IS1893-part3-Retaining WallDocument24 pagesDyn-EP-c-phai-IS1893-part3-Retaining WallKUSHAGRA SRIVASTAVANo ratings yet
- BITS Pilani ES2023 Tut11 v2Document21 pagesBITS Pilani ES2023 Tut11 v2Priyank SrivastavaNo ratings yet
- Theory of Elasticity Lecture BITS PilaniDocument17 pagesTheory of Elasticity Lecture BITS PilaniGOWTHAM K KNo ratings yet
- Chapter 5Document10 pagesChapter 5freefromspam420No ratings yet
- BITS Pilani stresses and columns notesDocument6 pagesBITS Pilani stresses and columns notesDHRUV KAMATNo ratings yet
- Lecture 19 (10-10-2022)Document17 pagesLecture 19 (10-10-2022)Harshaa BattuNo ratings yet
- Lecture 09 1582517092481Document26 pagesLecture 09 1582517092481shrikantmsdNo ratings yet
- Vigyan Samagam Sukalyan PresentationDocument31 pagesVigyan Samagam Sukalyan PresentationSukalyanNo ratings yet
- Rotation Predction Models For Isolated Footing: BITS PilaniDocument9 pagesRotation Predction Models For Isolated Footing: BITS Pilanisaket reddyNo ratings yet
- Topical SeminarDocument16 pagesTopical SeminarNitiraj ChauhanNo ratings yet
- Engineering Materials L5 - L6 - L7 - L8 - L9 - L10 - MergedDocument240 pagesEngineering Materials L5 - L6 - L7 - L8 - L9 - L10 - Mergedhdwivedi563No ratings yet
- Static Electric Fields in Material Media: Lecture-8Document11 pagesStatic Electric Fields in Material Media: Lecture-8Geetansh MehtaNo ratings yet
- Non Inertial FrameDocument8 pagesNon Inertial FrameAbdiel EspinosaNo ratings yet
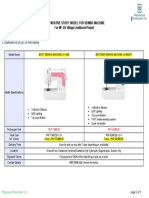
- Comparing Sewing Machine Models for Livelihood ProjectDocument1 pageComparing Sewing Machine Models for Livelihood ProjectJeca BellsNo ratings yet
- Fundamental Parameters of Antennas: Ability To Transmit Power in A Preferred DirectionDocument20 pagesFundamental Parameters of Antennas: Ability To Transmit Power in A Preferred DirectionAnonymous rpL3WPMGNo ratings yet
- Class 2Document41 pagesClass 2SANT SARANNo ratings yet
- 2 VectorCalculusDocument29 pages2 VectorCalculush20230148No ratings yet
- Beam Stiffness - An Overview - ScienceDirect TopicsDocument11 pagesBeam Stiffness - An Overview - ScienceDirect TopicsGeorge NazeehNo ratings yet
- FORM 3 SCI MS SARA Chapter 7Document12 pagesFORM 3 SCI MS SARA Chapter 7FARAH ALEEYA KHAIRUL AZMINNo ratings yet
- R. King, Nature Photonics 2008, Record BreakersDocument3 pagesR. King, Nature Photonics 2008, Record BreakersAndhika Mesias Arie RambaNo ratings yet
- C Purlins pAAAAAAAAroperties SI UNIT PHILIPPINES - Google SearchDocument2 pagesC Purlins pAAAAAAAAroperties SI UNIT PHILIPPINES - Google SearchDodong DumaliNo ratings yet
- Combinepdf PDFDocument284 pagesCombinepdf PDFRakshit AjmeraNo ratings yet
- GE8292 IQ 01 - by WWW - LearnEngineering.in PDFDocument40 pagesGE8292 IQ 01 - by WWW - LearnEngineering.in PDFCody LeeNo ratings yet
- Electrical Sciences (EEE F111) : Dr. Sudeep BaudhaDocument17 pagesElectrical Sciences (EEE F111) : Dr. Sudeep BaudhaSaumitra PandeyNo ratings yet
- Chapter 3 DB Animations Lect 1 2Document8 pagesChapter 3 DB Animations Lect 1 2Aman BhatiaNo ratings yet
- Angular Momentum and Fixed Axis Rotation GuideDocument53 pagesAngular Momentum and Fixed Axis Rotation GuideAman BhatiaNo ratings yet
- Chapter 5 Failures Resulting From Static PDFDocument95 pagesChapter 5 Failures Resulting From Static PDFAman BhatiaNo ratings yet
- Chapter 4 AP French PDFDocument39 pagesChapter 4 AP French PDFAman BhatiaNo ratings yet
- Chapter 6 French DB 1st Lect PDFDocument11 pagesChapter 6 French DB 1st Lect PDFAman BhatiaNo ratings yet
- Chapter 3a Geometry of CrystalsDocument81 pagesChapter 3a Geometry of CrystalsAman BhatiaNo ratings yet
- Chapter 5 AP French PDFDocument31 pagesChapter 5 AP French PDFAman BhatiaNo ratings yet
- Chapter 5 French DB Short Questions PDFDocument7 pagesChapter 5 French DB Short Questions PDFAman BhatiaNo ratings yet
- Chapter 3b Miller IndicesDocument50 pagesChapter 3b Miller Indicessiddharth agarwal100% (1)
- Chapter 4 French DB Lect 1 2 3 PDFDocument22 pagesChapter 4 French DB Lect 1 2 3 PDFAman BhatiaNo ratings yet
- Chapter 3 DB Nalanda PDFDocument71 pagesChapter 3 DB Nalanda PDFAman BhatiaNo ratings yet
- Chapter 5 French DB Slides 1 4lect PDFDocument34 pagesChapter 5 French DB Slides 1 4lect PDFAman BhatiaNo ratings yet
- Chapter 5 Coupled Oscillation D Bandy Lect 1 6 PDFDocument14 pagesChapter 5 Coupled Oscillation D Bandy Lect 1 6 PDFAman BhatiaNo ratings yet
- Chapter 6 PDFDocument53 pagesChapter 6 PDFAman BhatiaNo ratings yet
- Chapt 4 French Nalanda DBDocument24 pagesChapt 4 French Nalanda DBAman BhatiaNo ratings yet
- Chapter 6 A P French PDFDocument20 pagesChapter 6 A P French PDFAman BhatiaNo ratings yet
- Free Vibrations and Damped Harmonic MotionDocument33 pagesFree Vibrations and Damped Harmonic MotionkaranNo ratings yet
- Chapter 5 French PDFDocument70 pagesChapter 5 French PDFAman BhatiaNo ratings yet
- Chapter 7 - 7.3, 7.4 Nalanda PDFDocument31 pagesChapter 7 - 7.3, 7.4 Nalanda PDFAman BhatiaNo ratings yet
- Chapter 3 DB Nalanda PDFDocument71 pagesChapter 3 DB Nalanda PDFAman BhatiaNo ratings yet
- Chapter 7 French PDFDocument34 pagesChapter 7 French PDFAman BhatiaNo ratings yet
- Chapt 4 French PDFDocument59 pagesChapt 4 French PDFAman BhatiaNo ratings yet
- Forced oscillations and resonanceDocument34 pagesForced oscillations and resonanceAman BhatiaNo ratings yet
- Chapter 11 and Section 5.3Document70 pagesChapter 11 and Section 5.3Rahul SaxenaNo ratings yet
- Chapter 6 French PDFDocument23 pagesChapter 6 French PDFAman BhatiaNo ratings yet
- Chapter 11 and Section 5.3Document70 pagesChapter 11 and Section 5.3Rahul SaxenaNo ratings yet
- 1 s2.0 S0038092X12002368 MainDocument10 pages1 s2.0 S0038092X12002368 MainAman BhatiaNo ratings yet
- Revised Both Curri 2021-V3Document105 pagesRevised Both Curri 2021-V3mezigebu100% (1)
- Why Does Music Move UsDocument4 pagesWhy Does Music Move UskhanhngocnguyennnNo ratings yet
- Math Ed 485 Algebra Course KCDocument5 pagesMath Ed 485 Algebra Course KCExtra MailNo ratings yet
- #500 Series Bearings: Lubo Industries, IncDocument25 pages#500 Series Bearings: Lubo Industries, IncmateenNo ratings yet
- (Reuters Institute For The Study of Journalism) James Painter - Climate Change in The Media - Reporting Risk and Uncertainty-I. B. Tauris (2013)Document192 pages(Reuters Institute For The Study of Journalism) James Painter - Climate Change in The Media - Reporting Risk and Uncertainty-I. B. Tauris (2013)Thomas Ravelly Batista dos SantosNo ratings yet
- Social EntrepreneurshipDocument21 pagesSocial EntrepreneurshipSree LakshyaNo ratings yet
- Sample Answers From Watching The FilmDocument2 pagesSample Answers From Watching The FilmiffinichonchubhairNo ratings yet
- 9.06&9.01social Psychology JournalDocument17 pages9.06&9.01social Psychology JournalMatthew CheungNo ratings yet
- QC OF SUPPOSITORIESDocument23 pagesQC OF SUPPOSITORIESHassan kamalNo ratings yet
- Adoc - Pub - Bagaimana Motivasi Berprestasi Mendorong KeberhasiDocument18 pagesAdoc - Pub - Bagaimana Motivasi Berprestasi Mendorong KeberhasiDWIKI RIYADINo ratings yet
- Jul Dec 2021 SK HRH Crec v8 2Document2,264 pagesJul Dec 2021 SK HRH Crec v8 2San DeeNo ratings yet
- HandbookDocument154 pagesHandbookTrisphere Media TechnologiesNo ratings yet
- Marifel LayuganDocument3 pagesMarifel LayuganGabriel ZamoraNo ratings yet
- Spe 193796 MsDocument22 pagesSpe 193796 MsMurtibaahshe HDNo ratings yet
- TWIML - PODCAST - First NotesDocument3 pagesTWIML - PODCAST - First NotesKhim DV100% (2)
- 1.5 MM ss304 Material Test ReportDocument1 page1.5 MM ss304 Material Test ReportBalaji DefenceNo ratings yet
- Global Citizenship Courseware SSP032 GCED 1Document24 pagesGlobal Citizenship Courseware SSP032 GCED 1siegaralphNo ratings yet
- School of Mathematics and Statistics Spring Semester 2013-2014 Mathematical Methods For Statistics 2 HoursDocument2 pagesSchool of Mathematics and Statistics Spring Semester 2013-2014 Mathematical Methods For Statistics 2 HoursNico NicoNo ratings yet
- s7 - Gas Gathering and TransportationDocument50 pagess7 - Gas Gathering and TransportationMd Abid AfridiNo ratings yet
- Élan VitalDocument3 pagesÉlan Vitalleclub IntelligenteNo ratings yet
- Lecture 3Document10 pagesLecture 3Dr. Saad Saffah HresheeNo ratings yet
- Lesson 10 Graphic OrganizersDocument22 pagesLesson 10 Graphic Organizersisabelcadagtan10No ratings yet
- Unit 1Document25 pagesUnit 1ragavaharish463No ratings yet
- Flushing and Passivation SystemDocument2 pagesFlushing and Passivation Systemmyo myint aungNo ratings yet
- Tutorial - Time Series Analysis With Pandas - DataquestDocument32 pagesTutorial - Time Series Analysis With Pandas - DataquestHoussem ZEKIRINo ratings yet
- Fy2023 CBLD-9 RevisedDocument11 pagesFy2023 CBLD-9 Revisedbengalyadama15No ratings yet
- Danny Debois: Tips for Effective Whip Speeches in DebateDocument2 pagesDanny Debois: Tips for Effective Whip Speeches in DebateJOSE FRANCISCO VERGARA MUÑOZNo ratings yet
- Stellisept - Med - Scrub MSDSDocument10 pagesStellisept - Med - Scrub MSDSChoice OrganoNo ratings yet
- Advamce Diploma in Industrial Safety & Security Management (FF)Document21 pagesAdvamce Diploma in Industrial Safety & Security Management (FF)Dr Shabbir75% (4)
- SABIC-SUPEER™ mLLDPE-7118LA-Regulatory Data Sheet (RDS) - GlobalDocument13 pagesSABIC-SUPEER™ mLLDPE-7118LA-Regulatory Data Sheet (RDS) - Globalalnair coronaNo ratings yet