You might also like
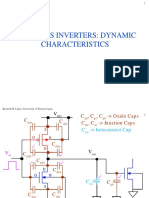
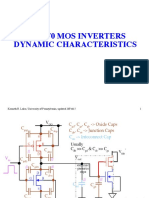
- Ee 560 Mos Inverters: Dynamic CharacteristicsDocument41 pagesEe 560 Mos Inverters: Dynamic CharacteristicssallyNo ratings yet
- MOS inDocument82 pagesMOS inhet shahNo ratings yet
- Second Law of Thermodynamics: Spontaneous Direction of ChangeDocument24 pagesSecond Law of Thermodynamics: Spontaneous Direction of ChangeMichael Conan MaglaqueNo ratings yet
- Lecture 1Document17 pagesLecture 1amrsalah40820No ratings yet
- Lec 7 Inverters IIDocument21 pagesLec 7 Inverters IIjishahaneeshNo ratings yet
- MIT course introduces key aircraft performance conceptsDocument8 pagesMIT course introduces key aircraft performance conceptsKhang DangNo ratings yet
- Compressible Flow Through Nozzles and Diffusers: V DT V D V VDocument14 pagesCompressible Flow Through Nozzles and Diffusers: V DT V D V VCamilo SantacruzNo ratings yet
- CMOS Circuits Lecture on Propagation Delay and Power DissipationDocument17 pagesCMOS Circuits Lecture on Propagation Delay and Power DissipationNITIN NAYANNo ratings yet
- Αντστροφείς MosDocument37 pagesΑντστροφείς MosvinothrathinamNo ratings yet
- Summary of Steady-State Converter Analysis and Design: Appendix ADocument15 pagesSummary of Steady-State Converter Analysis and Design: Appendix AUlisesNo ratings yet
- Achieving Buck-Boost Conversion with a Flyback TopologyDocument15 pagesAchieving Buck-Boost Conversion with a Flyback TopologyATULYA ALOK 17BEE0065No ratings yet
- Ee 560 Combinational Mos Logic Circuits: Static and Dynamic CharacteristicsDocument56 pagesEe 560 Combinational Mos Logic Circuits: Static and Dynamic Characteristicssachin rajputNo ratings yet
- Multi-compartment pharmacokinetic model of drug distribution in tissuesDocument4 pagesMulti-compartment pharmacokinetic model of drug distribution in tissuesashh BukhariNo ratings yet
- CRE1 Isothermal 4 UCL Second Year Chemical EngineeringDocument30 pagesCRE1 Isothermal 4 UCL Second Year Chemical EngineeringChughtai AmmarNo ratings yet
- Lecture 5Document51 pagesLecture 5abd rocksNo ratings yet
- 3-4 Integral Analysis11Document30 pages3-4 Integral Analysis11ASIM RIAZNo ratings yet
- C. AppendixDocument20 pagesC. AppendixgechnetNo ratings yet
- Aero - Lect5 - 2019 GlideDocument10 pagesAero - Lect5 - 2019 GlideAftab AliNo ratings yet
- Fmartine 5 60 Lecture10-Entropy-irreversibleDocument5 pagesFmartine 5 60 Lecture10-Entropy-irreversibleYanirePáezNo ratings yet
- Fmartine 5 60 Lecture10-Entropy-irreversibleDocument5 pagesFmartine 5 60 Lecture10-Entropy-irreversibleYanirePáezNo ratings yet
- Lecture #19: pn Junction Transient ResponseDocument14 pagesLecture #19: pn Junction Transient Response채정우No ratings yet
- CH 05 T - Lecture - 4Document24 pagesCH 05 T - Lecture - 4Carlos RamosNo ratings yet
- Jitendra Kumar Prajapati - 2020ppd5453Document10 pagesJitendra Kumar Prajapati - 2020ppd5453Smakshi ChoudharyNo ratings yet
- DC-DC Conveters Lecture 5Document46 pagesDC-DC Conveters Lecture 5AMV STREAMNo ratings yet
- PVT Behavior of Fluida & EOSDocument53 pagesPVT Behavior of Fluida & EOSEka WahyuNo ratings yet
- DC-DC Part 6 Double PDFDocument18 pagesDC-DC Part 6 Double PDFNarasimha RajuNo ratings yet
- High - and Low - Frequency MOSFETDocument16 pagesHigh - and Low - Frequency MOSFETarupNo ratings yet
- Governing EquationsDocument16 pagesGoverning EquationsVaishnavi SingreNo ratings yet
- 4 GrowthDocument40 pages4 Growthoğuz cantürkNo ratings yet
- Aerodyn2 Discussion 8 Climb Performance and Speed Propeller DrivenDocument11 pagesAerodyn2 Discussion 8 Climb Performance and Speed Propeller DrivenCapNo ratings yet
- PPT Isolated DC-DC Converters (Benny Yeung)Document31 pagesPPT Isolated DC-DC Converters (Benny Yeung)Terry rickyNo ratings yet
- Alternating Current - 3Document5 pagesAlternating Current - 3noi KlNo ratings yet
- Chapter8 Real Gases and Mixture of GasesDocument26 pagesChapter8 Real Gases and Mixture of GasesMUHAMMED FAISALNo ratings yet
- Formulario Termodinamica-2Document1 pageFormulario Termodinamica-2Anonymous 2x6VE65kNo ratings yet
- Buck Converter Circuit AnalysisDocument5 pagesBuck Converter Circuit AnalysisselageaalinNo ratings yet
- Thermodynamics and Entropy Eng ItaDocument40 pagesThermodynamics and Entropy Eng ItaLeonardo RubinoNo ratings yet
- 14 562ln08Document6 pages14 562ln08sammy wanakaiNo ratings yet
- Chapter 2 - Capacitors and InductorsDocument16 pagesChapter 2 - Capacitors and InductorsFebrian DzikriNo ratings yet
- MTV310 Chapter3-1 CompleteDocument5 pagesMTV310 Chapter3-1 CompleteThabiso MashigoNo ratings yet
- Digital Circuits: CMOS Dynamic Operation and Load CapacitanceDocument32 pagesDigital Circuits: CMOS Dynamic Operation and Load CapacitanceShwetaGautamNo ratings yet
- Thermodynamic Properties of FluidsDocument35 pagesThermodynamic Properties of FluidsYuli PeNo ratings yet
- Gas ReservoirDocument2 pagesGas ReservoirDarya Khan BhuttoNo ratings yet
- Bio Science Lecture SdeDocument75 pagesBio Science Lecture SdeBinit AgrawalNo ratings yet
- Mass BalanceDocument15 pagesMass BalanceJosse JoachinNo ratings yet
- Lesson 28 and 29 - Isentropic Flow With Area Change - Handout VersionDocument16 pagesLesson 28 and 29 - Isentropic Flow With Area Change - Handout VersionjacksayshiNo ratings yet
- Internal Combustion EngineDocument20 pagesInternal Combustion EngineRowin Mark Sabornido33% (3)
- THERMODYNAMICS EQUATIONSDocument11 pagesTHERMODYNAMICS EQUATIONSAnthony MacalindongNo ratings yet
- Chapter Four: Finite Control Volume AnalysisDocument16 pagesChapter Four: Finite Control Volume AnalysisMichael EmadNo ratings yet
- Lecture13 PDFDocument10 pagesLecture13 PDFkhanNo ratings yet
- PHYSICAL CHEMISTRY FOR ENGINEERING 2Document19 pagesPHYSICAL CHEMISTRY FOR ENGINEERING 2trades korNo ratings yet
- Bài Tập Mô Hình Hóa (Bình chứa-Van tiết lưu-Thiết bị tách pha-Thiết bị chưng cất)Document10 pagesBài Tập Mô Hình Hóa (Bình chứa-Van tiết lưu-Thiết bị tách pha-Thiết bị chưng cất)Thạc LêNo ratings yet
- Lecture # 6: Protection Techniques and Snubber CircuitsDocument20 pagesLecture # 6: Protection Techniques and Snubber CircuitsShehroz BaigNo ratings yet
- Assign - 2Document5 pagesAssign - 2Komal BhardwajNo ratings yet
- Hydraulics 1Document1 pageHydraulics 1NeilRustydelMundoNo ratings yet
- FormulaeDocument1 pageFormulaedanigonherNo ratings yet
- Current ElectricityDocument126 pagesCurrent ElectricityAvishkar JaiswalNo ratings yet
- Environmental Engineering SlidesDocument18 pagesEnvironmental Engineering Slidesathr hinaiNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- UNIT4 - Embedded System RTOS 1 - JP PDFDocument41 pagesUNIT4 - Embedded System RTOS 1 - JP PDFsachin rajputNo ratings yet
- Logic Families Tutorial - 2Document5 pagesLogic Families Tutorial - 2sachin rajputNo ratings yet
- Apache PigDocument21 pagesApache Pigsachin rajputNo ratings yet
- Digital Integrated CircuitsDocument39 pagesDigital Integrated CircuitsSachin RajputNo ratings yet
- Unit2 - Naive Bayes Classifier - HGDocument19 pagesUnit2 - Naive Bayes Classifier - HGsachin rajputNo ratings yet
- Packaging Electronic PDFDocument37 pagesPackaging Electronic PDFAzizNo ratings yet
- C Programming - Assignment 9 Structure and Union: WAP - Write A ProgramDocument1 pageC Programming - Assignment 9 Structure and Union: WAP - Write A Programsachin rajputNo ratings yet
- Ee 560 Combinational Mos Logic Circuits: Static and Dynamic CharacteristicsDocument56 pagesEe 560 Combinational Mos Logic Circuits: Static and Dynamic Characteristicssachin rajputNo ratings yet
- EE560 MOS Theory P202Document40 pagesEE560 MOS Theory P202sachin rajputNo ratings yet
- Ee 560 Mos Inverters: Static CharacteristicsDocument31 pagesEe 560 Mos Inverters: Static Characteristicssachin rajputNo ratings yet
- EE 560 MOS INVERTERS: STATIC CHARACTERISTICS AND OPERATING REGIONSDocument37 pagesEE 560 MOS INVERTERS: STATIC CHARACTERISTICS AND OPERATING REGIONSsachin rajputNo ratings yet
- Kenneth R. Laker, University of PennsylvaniaDocument32 pagesKenneth R. Laker, University of Pennsylvaniasachin rajputNo ratings yet
- Warehouse Management TransactionsDocument4 pagesWarehouse Management TransactionsstarimpactNo ratings yet
- Sep 2015 IG Investigation USISDocument29 pagesSep 2015 IG Investigation USISsenatortesterNo ratings yet
- StoDocument4 pagesStoaunhavcNo ratings yet
- Accurately Protect Generators and Motors from Negative Sequence CurrentsDocument15 pagesAccurately Protect Generators and Motors from Negative Sequence CurrentsAhmed ElsharkawyNo ratings yet
- Piling Suite Tutorial Manual 2015 PDFDocument74 pagesPiling Suite Tutorial Manual 2015 PDF汤耀No ratings yet
- S18 Series Sensors (AC Voltage) DatasheetDocument1 pageS18 Series Sensors (AC Voltage) DatasheetPaulomario RemuzgoNo ratings yet
- 52 GSM BSS Network PS KPI (Downlink TBF Establishment Success Rate) Optimization ManualDocument31 pages52 GSM BSS Network PS KPI (Downlink TBF Establishment Success Rate) Optimization ManualMistero_H100% (4)
- Dse6610 Dse6620 Installation InstructionsDocument2 pagesDse6610 Dse6620 Installation InstructionsmshahidshaukatNo ratings yet
- Account Assignment Category in SAP MMDocument4 pagesAccount Assignment Category in SAP MMiamnarendranNo ratings yet
- DatasheetDocument32 pagesDatasheetpereiramirandaduvarNo ratings yet
- Primavera 106PDocument4 pagesPrimavera 106PbihaiauNo ratings yet
- Fast EqualiserDocument14 pagesFast EqualiserRykord BeatsNo ratings yet
- Colorado Math StandardsDocument18 pagesColorado Math StandardsromulusxNo ratings yet
- PC200 Brochure UsaDocument6 pagesPC200 Brochure UsaTyler GoodwinNo ratings yet
- Python PandasDocument35 pagesPython PandasMayur Nasare100% (1)
- UntitledDocument206 pagesUntitledAlvin LieandoNo ratings yet
- SOP - TWM - Asset Management - v1Document12 pagesSOP - TWM - Asset Management - v1Abdul HafizNo ratings yet
- Night Duty Gurminder BHM 4Document2 pagesNight Duty Gurminder BHM 4vickie_sunnieNo ratings yet
- Siemens ICN KM ChallengeDocument3 pagesSiemens ICN KM ChallengeSabeena JamesNo ratings yet
- PytestDocument214 pagesPytestTushang JainNo ratings yet
- Quadratic-Theory-Set 1Document1 pageQuadratic-Theory-Set 1api-270516716No ratings yet
- Introduction To Linux For Real-Time Control: Introductory Guidelines and Reference For Control Engi-Neers and ManagersDocument78 pagesIntroduction To Linux For Real-Time Control: Introductory Guidelines and Reference For Control Engi-Neers and ManagersE Ravi EslavathNo ratings yet
- Bachelor of Quantity Surveying (Honours) Construction Supply Chain Management (MGT 60803) Group Assignment March 2017Document23 pagesBachelor of Quantity Surveying (Honours) Construction Supply Chain Management (MGT 60803) Group Assignment March 2017Shinde vishalNo ratings yet
- Guggenheim Bilbao Cladding MaterialsDocument11 pagesGuggenheim Bilbao Cladding MaterialsSandra SamirNo ratings yet
- VLSM Chart Class A - 8-15bits - 2nd OctetDocument1 pageVLSM Chart Class A - 8-15bits - 2nd OctetTibor W.No ratings yet
- 1.question Bank - IGMCRI (Anatomy)Document11 pages1.question Bank - IGMCRI (Anatomy)tanushri narendranNo ratings yet
- UCCN1004 - Lab 05 - Intro To ACL and Packet FilteringDocument9 pagesUCCN1004 - Lab 05 - Intro To ACL and Packet FilteringZHEN-HONG LEENo ratings yet
- Best Cover Letter For UpworkDocument5 pagesBest Cover Letter For Upworkbcqy21t7100% (2)
- VSE+ Training - APTARE IT Analytics: ArchitectureDocument13 pagesVSE+ Training - APTARE IT Analytics: ArchitectureCCIE DetectNo ratings yet