You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- 08 VibrationDocument10 pages08 VibrationAisha Zaheer0% (1)
- Vibration Diagnosis Control FinalDocument19 pagesVibration Diagnosis Control Finalsham javedNo ratings yet
- Guide engine dynamics vibrationDocument6 pagesGuide engine dynamics vibrationabm2281999No ratings yet
- VIBRATION ANALYSIS FUNDAMENTALSDocument76 pagesVIBRATION ANALYSIS FUNDAMENTALSAbderrahim Abaray100% (4)
- JM02001 - Introduction Guide To Vibration MonitoringDocument30 pagesJM02001 - Introduction Guide To Vibration MonitoringSachin PanwarNo ratings yet
- Torsional Vibration Analysis Beginners GuideDocument28 pagesTorsional Vibration Analysis Beginners GuideAlvaro Cotaquispe100% (1)
- Vibration Analysis GuideDocument40 pagesVibration Analysis Guidealxmaas100% (3)
- ANSYS Dynamic AnalysisDocument19 pagesANSYS Dynamic AnalysisPrateek JhaNo ratings yet
- Embedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityFrom EverandEmbedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityNo ratings yet
- Basics of vibration monitoring in 40 charactersDocument14 pagesBasics of vibration monitoring in 40 characterssandystaysNo ratings yet
- Vibration Monitoring Techniques (CMDocument28 pagesVibration Monitoring Techniques (CMAhmed SalemNo ratings yet
- Pump Condition Monitoring Through Vibration AnalysisDocument20 pagesPump Condition Monitoring Through Vibration AnalysisIgor Juric100% (3)
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentFrom EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentRating: 4.5 out of 5 stars4.5/5 (3)
- Case Histories in Vibration Analysis and Metal Fatigue for the Practicing EngineerFrom EverandCase Histories in Vibration Analysis and Metal Fatigue for the Practicing EngineerRating: 4.5 out of 5 stars4.5/5 (3)
- B&K Structural TestingDocument49 pagesB&K Structural TestingAshok100% (2)
- Analisis de Vibraciones Mecanicas SKFDocument31 pagesAnalisis de Vibraciones Mecanicas SKFJhonathan GarciaNo ratings yet
- Engineering Vibration Analysis with Application to Control SystemsFrom EverandEngineering Vibration Analysis with Application to Control SystemsNo ratings yet
- EM76 - Modal Testing Part 1 - Introduction & Impact TestingDocument4 pagesEM76 - Modal Testing Part 1 - Introduction & Impact TestingChad HuntNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Monitoring Power Plant EquipmentDocument28 pagesMonitoring Power Plant EquipmentCormac MyersNo ratings yet
- MELAWSMANUALDocument142 pagesMELAWSMANUALEasy Write0% (1)
- MELAWSMANUALDocument142 pagesMELAWSMANUALEasy Write0% (1)
- Operational Amplifier Noise: Techniques and Tips for Analyzing and Reducing NoiseFrom EverandOperational Amplifier Noise: Techniques and Tips for Analyzing and Reducing NoiseRating: 5 out of 5 stars5/5 (1)
- Belt, Rope and Chain DrivesDocument60 pagesBelt, Rope and Chain DrivesJason Dequin VillarosaNo ratings yet
- Mechanical Vibrations and Condition MonitoringFrom EverandMechanical Vibrations and Condition MonitoringRating: 5 out of 5 stars5/5 (1)
- Virgin Coconut Oil Manufacturing Plant GROUP 3 ME 5207 PDFDocument96 pagesVirgin Coconut Oil Manufacturing Plant GROUP 3 ME 5207 PDFReynalene PanaliganNo ratings yet
- Astm F 1281Document12 pagesAstm F 1281Attef BedaweNo ratings yet
- Edoc-Vibration Study and AnalysisDocument9 pagesEdoc-Vibration Study and AnalysisEl Comedor BenedictNo ratings yet
- Machine Reliability and Condition Monitoring: A Comprehensive Guide to Predictive Maintenance PlanningFrom EverandMachine Reliability and Condition Monitoring: A Comprehensive Guide to Predictive Maintenance PlanningRating: 4.5 out of 5 stars4.5/5 (2)
- VIBENGINEERINGDocument5 pagesVIBENGINEERINGCharlyn PandaNo ratings yet
- How Does Vibration Analysis WorkDocument6 pagesHow Does Vibration Analysis WorkTE B 41 Rohit MattiwadNo ratings yet
- Condition monitoring techniques for detecting early-stage faults in power plant systemsDocument13 pagesCondition monitoring techniques for detecting early-stage faults in power plant systemsjerome okoyeNo ratings yet
- Technote Vibration MeasurementsDocument2 pagesTechnote Vibration MeasurementsRob MooijNo ratings yet
- DefinitionsDocument2 pagesDefinitionsnatraj26No ratings yet
- 1.0 Concept: Stiffness of The Vibration SystemDocument10 pages1.0 Concept: Stiffness of The Vibration SystemasprillaNo ratings yet
- Tracking Down Vibrations: Modal and Operating Deflection Shape Analysis As Damage-Analysis ToolsDocument4 pagesTracking Down Vibrations: Modal and Operating Deflection Shape Analysis As Damage-Analysis ToolsTon PhichitNo ratings yet
- 1 AcknowledgementDocument9 pages1 AcknowledgementmahmoudNo ratings yet
- 1.1 VibrationDocument13 pages1.1 VibrationDanny MccartneyNo ratings yet
- Vibration: One of The Possible Modes of Vibration of A Circular Drum (See Other Modes)Document10 pagesVibration: One of The Possible Modes of Vibration of A Circular Drum (See Other Modes)Maung Tun LinNo ratings yet
- Lecture 5Document52 pagesLecture 5Wbamlak AshebrNo ratings yet
- Learning Objectives: Chapter One Vibration of Machinery and Fundamental ConceptsDocument9 pagesLearning Objectives: Chapter One Vibration of Machinery and Fundamental ConceptsOluwajuwon AdenugbaNo ratings yet
- 01 Introduction To Vibration 2018Document39 pages01 Introduction To Vibration 2018Ahmed SolimanNo ratings yet
- Vibration Analysis PDFDocument5 pagesVibration Analysis PDFMan HumanNo ratings yet
- Design Optimization For Vibration Level of Root Blower With Load ConditionDocument8 pagesDesign Optimization For Vibration Level of Root Blower With Load ConditionSayed KassarNo ratings yet
- Lec 1 2 3 4Document76 pagesLec 1 2 3 4khan fiveerNo ratings yet
- Familiarization With and Performance Check Of, Vibration Testing & Measuring EquipmentDocument33 pagesFamiliarization With and Performance Check Of, Vibration Testing & Measuring EquipmentOmar Saleem100% (1)
- Dynamics of Machinery Alt 2023Document43 pagesDynamics of Machinery Alt 2023ankam.shridharNo ratings yet
- Finalppt 141214102413 Conversion Gate01Document45 pagesFinalppt 141214102413 Conversion Gate01manat_swuNo ratings yet
- 1 s2.0 S221201731300649X Main PDFDocument6 pages1 s2.0 S221201731300649X Main PDFNinNo ratings yet
- Essay VibDocument3 pagesEssay VibPhilip ArpiaNo ratings yet
- Vibration Monitoring and AnalysisDocument8 pagesVibration Monitoring and AnalysishashimtkmceNo ratings yet
- Vibration MeasurementDocument5 pagesVibration MeasurementHussn YazdanNo ratings yet
- Mechanical Vibrations Types and ApplicationsDocument6 pagesMechanical Vibrations Types and ApplicationsAkshat ThakurNo ratings yet
- How To Choose and Use Shakers For Modal AnalysisDocument4 pagesHow To Choose and Use Shakers For Modal AnalysisMuhammad LuthfiNo ratings yet
- VibrationDocument25 pagesVibrationhammad javedNo ratings yet
- Vibration Basics PDFDocument11 pagesVibration Basics PDFGanseh100% (1)
- Mechanical VibrationDocument13 pagesMechanical VibrationKhalil Raza100% (1)
- Analysis of Vibration in Rotary Equipment: B. R. Aravindh Raj & P. JeyaramanDocument10 pagesAnalysis of Vibration in Rotary Equipment: B. R. Aravindh Raj & P. JeyaramanTJPRC PublicationsNo ratings yet
- Vibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingFrom EverandVibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingNo ratings yet
- Intelligent Vibration Control in Civil Engineering StructuresFrom EverandIntelligent Vibration Control in Civil Engineering StructuresRating: 5 out of 5 stars5/5 (1)
- ME 528 Vibration Engineering Final Requirement SolutionsDocument2 pagesME 528 Vibration Engineering Final Requirement SolutionsReynalene PanaliganNo ratings yet
- Tri P Pocket Photo PrinterDocument10 pagesTri P Pocket Photo PrinterReynalene PanaliganNo ratings yet
- range from 0.95 to 0.99 or greater, but α: DC DCDocument5 pagesrange from 0.95 to 0.99 or greater, but α: DC DCReynalene PanaliganNo ratings yet
- Hydrokinetics PsetDocument1 pageHydrokinetics PsetReynalene PanaliganNo ratings yet
- ME 413 Sample Computation v2Document4 pagesME 413 Sample Computation v2Reynalene PanaliganNo ratings yet
- Density Tower ME Lab 1Document4 pagesDensity Tower ME Lab 1Reynalene PanaliganNo ratings yet
- Machine Design1 2 FormulasDocument9 pagesMachine Design1 2 FormulasKeilah MizraimNo ratings yet
- Narrative IppiDocument16 pagesNarrative IppiReynalene PanaliganNo ratings yet
- ME LAB 3 - Review of Key Hydroelectric ConceptsDocument8 pagesME LAB 3 - Review of Key Hydroelectric ConceptsReynalene PanaliganNo ratings yet
- Batangas State University College of Engineering, Architecture and Fine Arts Mechanical Engineering DepartmentDocument4 pagesBatangas State University College of Engineering, Architecture and Fine Arts Mechanical Engineering DepartmentReynalene PanaliganNo ratings yet
- SafetyDocument1 pageSafetyReynalene PanaliganNo ratings yet
- Batangas State University College of Engineering, Architecture and Fine Arts Mechanical Engineering DepartmentDocument5 pagesBatangas State University College of Engineering, Architecture and Fine Arts Mechanical Engineering DepartmentReynalene PanaliganNo ratings yet
- Design of A 1000 Ton Round Square and Flat Steel Bar UpdatedDocument77 pagesDesign of A 1000 Ton Round Square and Flat Steel Bar UpdatedReynalene PanaliganNo ratings yet
- Batangas State University College of Engineering, Architecture and Fine Arts Mechanical Engineering DepartmentDocument4 pagesBatangas State University College of Engineering, Architecture and Fine Arts Mechanical Engineering DepartmentReynalene PanaliganNo ratings yet
- HEAT EXCHANGER ReportDocument9 pagesHEAT EXCHANGER ReportReynalene PanaliganNo ratings yet
- Design of 10000 500 ML Bottles Per Day of 70 Solution Sanitary Ethyl Alcohol Production Plant PDFDocument105 pagesDesign of 10000 500 ML Bottles Per Day of 70 Solution Sanitary Ethyl Alcohol Production Plant PDFReynalene PanaliganNo ratings yet
- Electromechani Cal System: Chapter 2: Motor Control ComponentsDocument35 pagesElectromechani Cal System: Chapter 2: Motor Control ComponentsReynalene PanaliganNo ratings yet
- TC XXX 9999023615Document1 pageTC XXX 9999023615Jean RaminhoNo ratings yet
- Swimming Pool, Pond, and Salt Water Pumps: Technical CatalogueDocument68 pagesSwimming Pool, Pond, and Salt Water Pumps: Technical CatalogueFénixNo ratings yet
- 04 Observing The SunDocument3 pages04 Observing The SungarryhodgesonNo ratings yet
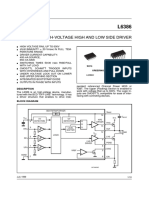
- L6386D - High-Voltage High and Low Side DriverDocument11 pagesL6386D - High-Voltage High and Low Side Driverdoppler9effectNo ratings yet
- Local Manufacture of Cast Resin Transformers: Transmission and DistributionDocument2 pagesLocal Manufacture of Cast Resin Transformers: Transmission and DistributionSharafat AliNo ratings yet
- De150103 BMDDocument3 pagesDe150103 BMDseve1No ratings yet
- Physics Practical File 2Document5 pagesPhysics Practical File 2Abu BakarNo ratings yet
- Neet Physics KotaDocument6 pagesNeet Physics KotaDipti SinghNo ratings yet
- Gong 2017Document26 pagesGong 2017EGI RISKIA MAULANANo ratings yet
- Starling EngineDocument7 pagesStarling EngineLuis ParadaNo ratings yet
- Initial Steps in Hydrolysis of TiCl4 to Produce TiO2 NanoparticlesDocument10 pagesInitial Steps in Hydrolysis of TiCl4 to Produce TiO2 NanoparticlesCuong Ky NguyenNo ratings yet
- Oil / Air Cooler ECO 11: 12V / 24V DC With Integrated Suction Filter and TankDocument1 pageOil / Air Cooler ECO 11: 12V / 24V DC With Integrated Suction Filter and TankRonaldNo ratings yet
- Devicenet: Leoni Special Cables GMBHDocument2 pagesDevicenet: Leoni Special Cables GMBHLeodoletaNo ratings yet
- Exhaust Base Vam Tonnage CalculationDocument9 pagesExhaust Base Vam Tonnage CalculationMagical RiyaNo ratings yet
- Cont. Eva.Document2 pagesCont. Eva.Rainwin TamayoNo ratings yet
- Experiment No. 1 Analysis of Resistive Networks ObjectivesDocument12 pagesExperiment No. 1 Analysis of Resistive Networks ObjectivesAlexandra OlsemNo ratings yet
- 11th Physics EM Slow Learners Study Materials English Medium PDF DownloadDocument162 pages11th Physics EM Slow Learners Study Materials English Medium PDF Downloaddhanasekaran1504No ratings yet
- Recibidor de LiquidoDocument4 pagesRecibidor de LiquidoIsrael YepezNo ratings yet
- GEKA - 2 CYLINDER MACHINES Hydracrop Series, Bendicrop 60 and 85Document69 pagesGEKA - 2 CYLINDER MACHINES Hydracrop Series, Bendicrop 60 and 85David Ramirez100% (1)
- Capacitive Circuits LabDocument2 pagesCapacitive Circuits LabAhmed MunirNo ratings yet
- 3.091 - Introduction To Solid State Chemistry Lecture Notes No. 1 Atomic and Electronic StructureDocument21 pages3.091 - Introduction To Solid State Chemistry Lecture Notes No. 1 Atomic and Electronic Structuremukul kumarNo ratings yet
- Ledvision: OR Lights From KARL STORZDocument12 pagesLedvision: OR Lights From KARL STORZSyed Ahad ZafarNo ratings yet
- Status of ACE-9 SanctionedDocument7 pagesStatus of ACE-9 SanctionedPuneet NirajNo ratings yet
- Statistics Lesson 1: Binomial, Poisson, Normal DistributionsDocument25 pagesStatistics Lesson 1: Binomial, Poisson, Normal DistributionsAlicia YipNo ratings yet
- FM2 (4th) May2019Document2 pagesFM2 (4th) May2019Parminder SinghNo ratings yet
- Mechanical Vibrations Chapter ExercisesDocument15 pagesMechanical Vibrations Chapter ExercisesMohammed Al HelaylNo ratings yet
- A2 JuneDocument4 pagesA2 JunejayaniNo ratings yet
- Statcom BacatáDocument26 pagesStatcom BacatájorgeNo ratings yet