You might also like
- Invisible CitiesDocument14 pagesInvisible Citiesvelveteeny0% (1)
- Battery Calculations For Fire Alarm and Signaling SystemsDocument7 pagesBattery Calculations For Fire Alarm and Signaling Systemsleland macasinag100% (1)
- IEEE I3 PerformanceMeasuresFinal 1999 PDFDocument6 pagesIEEE I3 PerformanceMeasuresFinal 1999 PDFsyed Mujtaba hassanNo ratings yet
- Tuma Research ManualDocument57 pagesTuma Research ManualKashinde Learner Centered Mandari100% (1)
- Ginart 1999Document7 pagesGinart 1999Maximo La Vida ContinuaNo ratings yet
- Datasheet For 22KW MotorDocument4 pagesDatasheet For 22KW MotorSudipto MajumderNo ratings yet
- Governing Stroking: LargeDocument2 pagesGoverning Stroking: Largeصبا رياض فتاح الرفاعيNo ratings yet
- White Paper CT Saturation in Industrial Applications Analysis and Application GuidelinesDocument18 pagesWhite Paper CT Saturation in Industrial Applications Analysis and Application Guidelinesbaskaranjay5502No ratings yet
- A New Start-Up Method For A Load Commutated Inverter For Large Synchronous Generator of Gas-TurbineDocument10 pagesA New Start-Up Method For A Load Commutated Inverter For Large Synchronous Generator of Gas-TurbinePaulo Sérgio RodriguesNo ratings yet
- Fuzzy Logic Direct Torque ControlDocument6 pagesFuzzy Logic Direct Torque ControlBook4AllNo ratings yet
- Calculation of IDMT Over CurrentDocument4 pagesCalculation of IDMT Over CurrentAbhishek RajputNo ratings yet
- SMA Sunny High Power 150 KW PDFDocument18 pagesSMA Sunny High Power 150 KW PDFAbdenour YahiNo ratings yet
- Motor Starting: Impacts and GuidelinesDocument21 pagesMotor Starting: Impacts and Guidelinessandeep kumar mishraNo ratings yet
- 5.ETAP Motor Modelling and Testing PDFDocument20 pages5.ETAP Motor Modelling and Testing PDFhussainNo ratings yet
- A Practical Investigation of A High Power Bidirectional ChargingDocument7 pagesA Practical Investigation of A High Power Bidirectional ChargingPRAJWAL MagadiNo ratings yet
- VectorControl HWDocument1 pageVectorControl HWmvaranNo ratings yet
- Bodine User Manual Mod 0865 0866 Unfiltered DC SCR Controls 07400205C WebDocument2 pagesBodine User Manual Mod 0865 0866 Unfiltered DC SCR Controls 07400205C WebMohamed mosadNo ratings yet
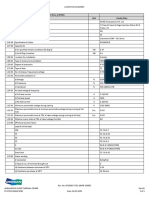
- AC MOTOR DATASHEET (Jawaharpur - COC Drive - 0.37kW) SL. No. Description Unit Vendor DataDocument1 pageAC MOTOR DATASHEET (Jawaharpur - COC Drive - 0.37kW) SL. No. Description Unit Vendor DataMohammad AdilNo ratings yet
- How To Use Optocoupler Normalized Curves - VishayDocument3 pagesHow To Use Optocoupler Normalized Curves - VishayPelotaDeTrapoNo ratings yet
- SC SCS US GridServices TI en 11Document16 pagesSC SCS US GridServices TI en 11Trần Quang TuyênNo ratings yet
- Switcheo Controlado de Cierre de TR Corriente Inrush PDFDocument11 pagesSwitcheo Controlado de Cierre de TR Corriente Inrush PDFlibrosNo ratings yet
- 500W High Efficiency Switched-Tank Converter (STC) Reference Design Based On STNRG328S and STPRDC02A For 54V Bus Conversion in Server ApplicationDocument45 pages500W High Efficiency Switched-Tank Converter (STC) Reference Design Based On STNRG328S and STPRDC02A For 54V Bus Conversion in Server ApplicationGanapathiNo ratings yet
- Inrush Curve - ReferenceDocument1 pageInrush Curve - Referencesureshbabum85No ratings yet
- HV Winding Phase Overcurrent ProtectionDocument5 pagesHV Winding Phase Overcurrent Protection386No ratings yet
- CT Saturation in Industrial Applications - : Analysis and Application GuidelinesDocument34 pagesCT Saturation in Industrial Applications - : Analysis and Application GuidelinesalpcruzNo ratings yet
- CT Saturation in Industrial Applications - : Analysis and Application GuidelinesDocument34 pagesCT Saturation in Industrial Applications - : Analysis and Application GuidelinesAndré LuizNo ratings yet
- Harmonic Losses in Induction Motors Caused by Voltages Waveform DistortionsDocument6 pagesHarmonic Losses in Induction Motors Caused by Voltages Waveform DistortionsДинка ИвановаNo ratings yet
- DC Motor Speed ControllerDocument22 pagesDC Motor Speed ControllerShafqt MbrkNo ratings yet
- Setting VCB 200 AmpDocument5 pagesSetting VCB 200 AmpAUGUSTA WIBI ARDIKTANo ratings yet
- Alternator Data Sheet: General CharacteristicsDocument2 pagesAlternator Data Sheet: General CharacteristicsJuly E. Maldonado M.No ratings yet
- Capacitive Voltage Transformer Transient Overreach Concerns andDocument7 pagesCapacitive Voltage Transformer Transient Overreach Concerns andArian Mahdavian100% (1)
- Ansi - Scte 81 - 2007Document13 pagesAnsi - Scte 81 - 2007Jet TorresNo ratings yet
- MCT I 1415343544 Sales enDocument14 pagesMCT I 1415343544 Sales enpisemude2706No ratings yet
- 01602115Document6 pages01602115castilho22No ratings yet
- HSBT MBTDocument1 pageHSBT MBTDEADMANNo ratings yet
- Pe Q&aDocument3 pagesPe Q&aDastagiri Reddy BonthapalleNo ratings yet
- Coordinación de Protecciones SiemensDocument9 pagesCoordinación de Protecciones SiemensivanNo ratings yet
- Improve Direct Torque Control Performance of Induction Motor With Duty Ratio ModulationDocument5 pagesImprove Direct Torque Control Performance of Induction Motor With Duty Ratio ModulationSONU KUMARNo ratings yet
- Gek 6885eDocument12 pagesGek 6885eMuhammad IdreesarainNo ratings yet
- Setting VCB 250 AmpDocument5 pagesSetting VCB 250 AmpAUGUSTA WIBI ARDIKTANo ratings yet
- Sisngle Phase RectifierDocument5 pagesSisngle Phase RectifiermücahitNo ratings yet
- HarishDocument34 pagesHarishharish_crieraNo ratings yet
- PMSMDocument5 pagesPMSMAnimesh PatnaikNo ratings yet
- Slua 053Document13 pagesSlua 053carlosibaNo ratings yet
- Power Electronics Question BankDocument14 pagesPower Electronics Question BankHitesh GoyalNo ratings yet
- Worksheet A: Theta 2.0 TCI EngineDocument19 pagesWorksheet A: Theta 2.0 TCI EngineCarlos Enrique Castillo SaavedraNo ratings yet
- Power-System Protection PDFDocument22 pagesPower-System Protection PDFSyafrizal SyafrizalNo ratings yet
- MV - Application Guide - CB - 05-Motor Switching - Rev 2 - 2016-11Document15 pagesMV - Application Guide - CB - 05-Motor Switching - Rev 2 - 2016-11Mahmoud ChihebNo ratings yet
- Ijsei 21813 15 PDFDocument5 pagesIjsei 21813 15 PDFHarikrishnan SNo ratings yet
- 300 SQMM For 330kw Wattpower InverterDocument1 page300 SQMM For 330kw Wattpower Inverterharikrushan.patelNo ratings yet
- PWM Drive Filter Inductor Influence On Transient Immunity PAPERDocument7 pagesPWM Drive Filter Inductor Influence On Transient Immunity PAPERpatrickNo ratings yet
- Uc3842 - Current-Mode ControlDocument16 pagesUc3842 - Current-Mode ControlGiovani AkNo ratings yet
- Battery Sizing TemplateDocument15 pagesBattery Sizing TemplateJAY PARIKHNo ratings yet
- Weili 2017Document4 pagesWeili 2017Givan HidayatNo ratings yet
- 6919 UsingHighResolution BH 20210226 WebDocument9 pages6919 UsingHighResolution BH 20210226 WebJoão Márcio JorgeNo ratings yet
- Specification of 33-.63 KV 1.67MVA TransformerDocument8 pagesSpecification of 33-.63 KV 1.67MVA TransformerM Abu SayedNo ratings yet
- Harmonic Treatment in Industrial PowerDocument115 pagesHarmonic Treatment in Industrial PowerAbhishek MishraNo ratings yet
- Autochangeover in Power PlantsDocument18 pagesAutochangeover in Power PlantsSukant BhattacharyaNo ratings yet
- Power Electronics Exam 2017 SolutionsDocument13 pagesPower Electronics Exam 2017 SolutionsBakri BugaNo ratings yet
- Lab 2 Part 1Document31 pagesLab 2 Part 1Zainuddin BusuNo ratings yet
- EM-CSD Art by K.K.MurtyDocument15 pagesEM-CSD Art by K.K.Murtyk K MurtyNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Transmission Losses 20190906 PresentationDocument61 pagesTransmission Losses 20190906 Presentationsyed Mujtaba hassanNo ratings yet
- Fluke MDA-510 and MDA-550 Motor Drive Analyzer: Technical DataDocument10 pagesFluke MDA-510 and MDA-550 Motor Drive Analyzer: Technical Datasyed Mujtaba hassanNo ratings yet
- User Manual: PAC-T100 (Transformer Protection and Control Unit)Document90 pagesUser Manual: PAC-T100 (Transformer Protection and Control Unit)syed Mujtaba hassan100% (1)
- SOC - TOP - 07.2 - D.2 - System - Protection - Behaviour and - Settings - During - System - DisturbancesDocument42 pagesSOC - TOP - 07.2 - D.2 - System - Protection - Behaviour and - Settings - During - System - Disturbancessyed Mujtaba hassanNo ratings yet
- V7i1 1266Document6 pagesV7i1 1266syed Mujtaba hassanNo ratings yet
- Analysis of Ce Inter-Area Oscillations of 1 December 2016Document13 pagesAnalysis of Ce Inter-Area Oscillations of 1 December 2016syed Mujtaba hassanNo ratings yet
- Comparison of PSS, SVC and STATCOM Controllers For Damping Power System OscillationsDocument8 pagesComparison of PSS, SVC and STATCOM Controllers For Damping Power System Oscillationssyed Mujtaba hassanNo ratings yet
- File Naming Convention For Time Sequence DataDocument6 pagesFile Naming Convention For Time Sequence Datasyed Mujtaba hassanNo ratings yet
- Medreg Regulatory PracticesDocument36 pagesMedreg Regulatory Practicessyed Mujtaba hassanNo ratings yet
- Documentation On Controller Tests in Test Grid ConfigurationsDocument21 pagesDocumentation On Controller Tests in Test Grid Configurationssyed Mujtaba hassanNo ratings yet
- IEEE Guide For Grounding of Instrument Transformer Secondary Circuits and CasesDocument53 pagesIEEE Guide For Grounding of Instrument Transformer Secondary Circuits and Casessyed Mujtaba hassanNo ratings yet
- Blackout in PakistanDocument6 pagesBlackout in Pakistansyed Mujtaba hassanNo ratings yet
- Transient Frequency Performance and Wind Penetration: J. MccalleyDocument47 pagesTransient Frequency Performance and Wind Penetration: J. Mccalleysyed Mujtaba hassanNo ratings yet
- Component Models For Harmonic Analysis: ETAP Knowledge BaseDocument4 pagesComponent Models For Harmonic Analysis: ETAP Knowledge Basesyed Mujtaba hassanNo ratings yet
- Hare and Hyena: Mutugi KamundiDocument18 pagesHare and Hyena: Mutugi KamundiAndresileNo ratings yet
- PD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsDocument20 pagesPD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsHazel Jael HernandezNo ratings yet
- Very Narrow Aisle MTC Turret TruckDocument6 pagesVery Narrow Aisle MTC Turret Truckfirdaushalam96No ratings yet
- RARE Manual For Training Local Nature GuidesDocument91 pagesRARE Manual For Training Local Nature GuidesenoshaugustineNo ratings yet
- Practice Problems - Electrochemical CellDocument5 pagesPractice Problems - Electrochemical CellYehia IbrahimNo ratings yet
- Quotation of Suny PDFDocument5 pagesQuotation of Suny PDFHaider KingNo ratings yet
- Loctite 586 PDFDocument9 pagesLoctite 586 PDForihimieNo ratings yet
- DIR-819 A1 Manual v1.02WW PDFDocument172 pagesDIR-819 A1 Manual v1.02WW PDFSerginho Jaafa ReggaeNo ratings yet
- Information Systems and Supply Chain ManagementDocument2 pagesInformation Systems and Supply Chain Managementvipinkandpal86No ratings yet
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocument2 pagesGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiNo ratings yet
- Simon Ardhi Yudanto UpdateDocument3 pagesSimon Ardhi Yudanto UpdateojksunarmanNo ratings yet
- Industrial ExperienceDocument30 pagesIndustrial ExperienceThe GridLockNo ratings yet
- PostScript Quick ReferenceDocument2 pagesPostScript Quick ReferenceSneetsher CrispyNo ratings yet
- Philodendron Plants CareDocument4 pagesPhilodendron Plants CareSabre FortNo ratings yet
- Derma Notes 22pages. DR - Vishwa Medical CoachingDocument23 pagesDerma Notes 22pages. DR - Vishwa Medical CoachingΝίκος ΣυρίγοςNo ratings yet
- 2nd Term Project 4º Eso Beauty Canons 2015-16 DefinitivoDocument2 pages2nd Term Project 4º Eso Beauty Canons 2015-16 DefinitivopasferacosNo ratings yet
- DCS800ServiceManual RevADocument96 pagesDCS800ServiceManual RevAElinplastNo ratings yet
- Caring For Women Experiencing Breast Engorgement A Case ReportDocument6 pagesCaring For Women Experiencing Breast Engorgement A Case ReportHENINo ratings yet
- 444323735-Chem-Matters-Workbook-2E-Teacher-s-Edn-pdf 16-16Document1 page444323735-Chem-Matters-Workbook-2E-Teacher-s-Edn-pdf 16-16whatisNo ratings yet
- ABARI-Volunteer Guide BookDocument10 pagesABARI-Volunteer Guide BookEla Mercado0% (1)
- Carnegie Mellon Thesis RepositoryDocument4 pagesCarnegie Mellon Thesis Repositoryalisonreedphoenix100% (2)
- Safety Data Sheet SDS For CB-G PG Precision Grout and CB-G MG Multipurpose Grout Documentation ASSET DOC APPROVAL 0536Document4 pagesSafety Data Sheet SDS For CB-G PG Precision Grout and CB-G MG Multipurpose Grout Documentation ASSET DOC APPROVAL 0536BanyuNo ratings yet
- Lesson 1 3 Transes in Reading in Philippine HistoryDocument17 pagesLesson 1 3 Transes in Reading in Philippine HistoryNAPHTALI WILLIAMS GONo ratings yet
- 0012 Mergers and Acquisitions Current Scenario andDocument20 pages0012 Mergers and Acquisitions Current Scenario andJuke LastNo ratings yet
- LP32HS User Manual v1Document52 pagesLP32HS User Manual v1tonizx7rrNo ratings yet
- Mfin 7002 Investment Analysis and Portfolio ManagementDocument5 pagesMfin 7002 Investment Analysis and Portfolio ManagementjessieNo ratings yet
- AE Notification 2015 NPDCLDocument24 pagesAE Notification 2015 NPDCLSuresh DoosaNo ratings yet
- Evidence Prove DiscriminationDocument5 pagesEvidence Prove DiscriminationRenzo JimenezNo ratings yet