You might also like
- Gateway A2 Test 1BDocument3 pagesGateway A2 Test 1BNewteacher29100% (6)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- F07HW8 Taylor 11.14Document7 pagesF07HW8 Taylor 11.14Daniel DíazNo ratings yet
- MIET1071 Solid Mechanics 3 Assessment Task 1 QuestionsDocument2 pagesMIET1071 Solid Mechanics 3 Assessment Task 1 QuestionsUsama AdeelNo ratings yet
- MIET1071 Solid Mechanics 3 Assessment Task 1 QuestionsDocument2 pagesMIET1071 Solid Mechanics 3 Assessment Task 1 QuestionsUsama AdeelNo ratings yet
- Wind Analysis ReportDocument84 pagesWind Analysis ReportUsama AdeelNo ratings yet
- Wind Analysis ReportDocument84 pagesWind Analysis ReportUsama AdeelNo ratings yet
- The Story of A Seagull and The Cat Who Taught Her To Fly PDFDocument46 pagesThe Story of A Seagull and The Cat Who Taught Her To Fly PDFYo Seven67% (3)
- ICT4D - Richard Heeks (2305843009216382716)Document307 pagesICT4D - Richard Heeks (2305843009216382716)Jeff GeoffNo ratings yet
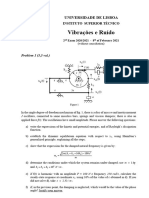
- Exam Vibrations and NoiseDocument6 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- TD Analyse 2Document31 pagesTD Analyse 2عالم السعادة- World HappinessNo ratings yet
- Vibration FundamentalsDocument25 pagesVibration FundamentalsManashaaNo ratings yet
- Exam Vibrations and NoiseDocument6 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- Goldstein 19 24 25Document9 pagesGoldstein 19 24 25bgiangre8372100% (1)
- Home Assignment PCMPhysicsPhy SolPhysics Solution & Answer Key P6Document13 pagesHome Assignment PCMPhysicsPhy SolPhysics Solution & Answer Key P6mayank.chandak21No ratings yet
- Structural Dynamics: 2CE611 by DR S S Mishra, NIT Patna: Rayleigh QuotientDocument7 pagesStructural Dynamics: 2CE611 by DR S S Mishra, NIT Patna: Rayleigh QuotientRoshni TNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- HW6 15oct18 SolnDocument6 pagesHW6 15oct18 SolnMuhammad UsmanNo ratings yet
- Tutorial 4LDSDocument3 pagesTutorial 4LDSshivendra.singh.vermaNo ratings yet
- Equations of Motion, Torsional Springs, LagrangeDocument6 pagesEquations of Motion, Torsional Springs, Lagrangeleongeorge007No ratings yet
- Lecture 17Document21 pagesLecture 17narvan.m31No ratings yet
- Assignment 4 Solutions 10Document11 pagesAssignment 4 Solutions 10Arfaz HussainNo ratings yet
- Ravioli Ravioli, Dame La FormuoliDocument4 pagesRavioli Ravioli, Dame La FormuoliLabfis 10No ratings yet
- Assignment in Advanced Quantum MechanicsDocument2 pagesAssignment in Advanced Quantum MechanicsdivyaNo ratings yet
- Central Force Motion and Orbital EquationsDocument6 pagesCentral Force Motion and Orbital EquationsMonica RicoNo ratings yet
- Assignment1 SolutionDocument16 pagesAssignment1 Solutiondagani ranisamyukthaNo ratings yet
- Engineering Tripos Part IB Mechanics ProblemsDocument16 pagesEngineering Tripos Part IB Mechanics ProblemsluchogilmourNo ratings yet
- Solution - Dynamics of StructuresDocument7 pagesSolution - Dynamics of StructuresSocialR RecherchesNo ratings yet
- Onsite Test 2015: Limited Solutions: 1 Problem 1Document3 pagesOnsite Test 2015: Limited Solutions: 1 Problem 1ahmadNo ratings yet
- Quiz 2 SolDocument9 pagesQuiz 2 SolRyan ArcherNo ratings yet
- ES2A7 - Fluid Mechanics Example Classes Example Questions (Set IV)Document8 pagesES2A7 - Fluid Mechanics Example Classes Example Questions (Set IV)Alejandro PerezNo ratings yet
- Sol 6Document5 pagesSol 6Luis ZambranoNo ratings yet
- Vibrations: D. Energy Methods E. Undamped Forced Vibrations F. Damped Free Vibrations G. Damped Forced VibrationsDocument13 pagesVibrations: D. Energy Methods E. Undamped Forced Vibrations F. Damped Free Vibrations G. Damped Forced VibrationsJitendra ItankarNo ratings yet
- AIEEE 2003 Physics & Chemistry Solutions: M / WB 10 10 10 V E B Qe VBDocument25 pagesAIEEE 2003 Physics & Chemistry Solutions: M / WB 10 10 10 V E B Qe VBpremsempireNo ratings yet
- Mid Fall 2005Document4 pagesMid Fall 2005Shweta SridharNo ratings yet
- Free Undamped Vibration:: x (t) = A cos (ωt - β) = a ω + cos (t) b sin (ωt)Document10 pagesFree Undamped Vibration:: x (t) = A cos (ωt - β) = a ω + cos (t) b sin (ωt)ahmedNo ratings yet
- Units & DimensionsDocument9 pagesUnits & DimensionsCHAPPA CHAKRAVARTHYNo ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- Dielectric slab waveguide analysis and multimode fiber characteristicsDocument22 pagesDielectric slab waveguide analysis and multimode fiber characteristicsmnahas84No ratings yet
- SHM SummaryDocument3 pagesSHM SummaryalifikmalNo ratings yet
- FORMULASDocument1 pageFORMULASmesfin DemiseNo ratings yet
- PHYS 101 - General Physics-I, Final ExamDocument8 pagesPHYS 101 - General Physics-I, Final ExamhuuuzenNo ratings yet
- SDOF Forced VibrationsDocument15 pagesSDOF Forced VibrationsSachin BharadwajNo ratings yet
- 1.3.2 Application of PDE - HeatDocument10 pages1.3.2 Application of PDE - HeatCT MarNo ratings yet
- Chapter 3 (1) - DefinitionsDocument12 pagesChapter 3 (1) - DefinitionsalonsoNo ratings yet
- Phys 203 Princeton University Fall 2006 Final Exam: K R K VDocument5 pagesPhys 203 Princeton University Fall 2006 Final Exam: K R K Vmichael pasquiNo ratings yet
- Von Mises Yield CriterionDocument4 pagesVon Mises Yield CriterionJanatan ChoiNo ratings yet
- Unusual Pendulum Potential Energy ApproximationDocument8 pagesUnusual Pendulum Potential Energy ApproximationTeeranun NakyaiNo ratings yet
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocument5 pagesAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARNo ratings yet
- Quantum Mechanics and The Hydrogen AtomDocument19 pagesQuantum Mechanics and The Hydrogen AtomIoan Paul PârleaNo ratings yet
- Parcial FinalDocument10 pagesParcial FinalRamon Felipe Plata MorenoNo ratings yet
- Springs and Oscillations: Effective Stiffness and Natural FrequencyDocument20 pagesSprings and Oscillations: Effective Stiffness and Natural FrequencyAbdeta DendanaNo ratings yet
- 08 Differential Equations - Second Order LDE ApplicationsDocument25 pages08 Differential Equations - Second Order LDE ApplicationsRemo Rubian EvangelistaNo ratings yet
- Analog Communication - AM ModulatorsDocument5 pagesAnalog Communication - AM ModulatorsB.Prashant JhaNo ratings yet
- DSP4 Fourier Series - UnlockedDocument46 pagesDSP4 Fourier Series - UnlockedluisperikoNo ratings yet
- Accelerometer Frequency Response AnalysisDocument4 pagesAccelerometer Frequency Response AnalysisTrung PhanNo ratings yet
- Rotating UnbalanceDocument4 pagesRotating UnbalanceAngelNo ratings yet
- Qual 18 p1 SolDocument3 pagesQual 18 p1 SolKarishtain NewtonNo ratings yet
- Assignment2Document6 pagesAssignment2Alok KumarNo ratings yet
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- Appendix A:: Conservation of Mechanical Energy Conservation of Linear MomentumDocument5 pagesAppendix A:: Conservation of Mechanical Energy Conservation of Linear MomentumOliver KrausNo ratings yet
- V&N 354 LectureLesing4Document6 pagesV&N 354 LectureLesing4YemukelaniNo ratings yet
- Influence of Base or Support Motion On A Mass Attached To ItDocument4 pagesInfluence of Base or Support Motion On A Mass Attached To ItAngNo ratings yet
- SOLUTIONS EXPLORER TEST-02 (ET11-02) 13th Nov.Document19 pagesSOLUTIONS EXPLORER TEST-02 (ET11-02) 13th Nov.PANKAJ KUMAR YADAVNo ratings yet
- Chapter 10Document21 pagesChapter 10StefanPerendijaNo ratings yet
- Sol - 12Document2 pagesSol - 12kirthanaNo ratings yet
- Ir Based Tachometer and Output Display On Computer by Arduino With Labveiw Group MembersDocument12 pagesIr Based Tachometer and Output Display On Computer by Arduino With Labveiw Group MembersUsama AdeelNo ratings yet
- Ir Based Tachometer and Output Display On Computer by Arduino With Labveiw Group MembersDocument12 pagesIr Based Tachometer and Output Display On Computer by Arduino With Labveiw Group MembersUsama AdeelNo ratings yet
- Lecture-Tutorial 1: A/Prof. Yingyan Zhang Yingyan - Zhang@rmit - Edu.auDocument19 pagesLecture-Tutorial 1: A/Prof. Yingyan Zhang Yingyan - Zhang@rmit - Edu.auUsama AdeelNo ratings yet
- Lecture-Tutorial 1: A/Prof. Yingyan Zhang Yingyan - Zhang@rmit - Edu.auDocument19 pagesLecture-Tutorial 1: A/Prof. Yingyan Zhang Yingyan - Zhang@rmit - Edu.auUsama AdeelNo ratings yet
- Learning Guide: Mechanical Engineering 37Document12 pagesLearning Guide: Mechanical Engineering 37Usama AdeelNo ratings yet
- Learning Guide: Mechanical Engineering 37Document12 pagesLearning Guide: Mechanical Engineering 37Usama AdeelNo ratings yet
- Wind Analysis ReportDocument84 pagesWind Analysis ReportUsama AdeelNo ratings yet
- Financial Management Notes - Dividend Decision - Dynamic Tutorials and ServicesDocument10 pagesFinancial Management Notes - Dividend Decision - Dynamic Tutorials and Servicessimranarora2007No ratings yet
- DocumentDocument14 pagesDocumentAnjali RajaNo ratings yet
- MMRP Narrative Report FormatDocument3 pagesMMRP Narrative Report FormatClarence Dave TolentinoNo ratings yet
- PETDocument4 pagesPETMaria Dolores Barrionuevo AlvarezNo ratings yet
- Heliopolis Language Modern School Academic Year (2015-2016) Model Exam (9) 1st Prep (Unit 3) Aim High (A-Level)Document2 pagesHeliopolis Language Modern School Academic Year (2015-2016) Model Exam (9) 1st Prep (Unit 3) Aim High (A-Level)Yasser MohamedNo ratings yet
- Advertising and Imc Principles and Practice 11th Edition Moriarty Solutions ManualDocument28 pagesAdvertising and Imc Principles and Practice 11th Edition Moriarty Solutions Manualcemeteryliana.9afku100% (19)
- MTSC QuestionsDocument8 pagesMTSC QuestionsAbhi RamNo ratings yet
- Solutions Manual To Accompany A Second Course in Statistics Regression Analysis 7th Edition 0321691695Document23 pagesSolutions Manual To Accompany A Second Course in Statistics Regression Analysis 7th Edition 0321691695DonnaLopezysned100% (36)
- Housing Inequality Causes and SolutionsDocument5 pagesHousing Inequality Causes and SolutionsFredrickNo ratings yet
- Quam SingulariDocument2 pagesQuam SingulariMichael WurtzNo ratings yet
- Effects of The Sugar RevolutionDocument9 pagesEffects of The Sugar RevolutionSusan BarriotNo ratings yet
- International Organizations and RelationsDocument3 pagesInternational Organizations and RelationsPachie MoloNo ratings yet
- Lesson 19 - Preparation of Capital Statement and Balance SheetDocument6 pagesLesson 19 - Preparation of Capital Statement and Balance SheetMayeng MonayNo ratings yet
- Monitoring Mouse ActivityDocument4 pagesMonitoring Mouse ActivityrehnaNo ratings yet
- Device Test ModeDocument14 pagesDevice Test ModeNay SoeNo ratings yet
- Bitonio V CoaDocument24 pagesBitonio V Coamarjorie requirmeNo ratings yet
- Alora Sealord History, How and Why They Were FormedDocument1 pageAlora Sealord History, How and Why They Were Formedgoddessjanefire003No ratings yet
- Hatch-Slack PathwayDocument10 pagesHatch-Slack Pathwaychurail khanNo ratings yet
- CSC340 - HW3Document28 pagesCSC340 - HW3Daniel sNo ratings yet
- 51 Power SteeringDocument72 pages51 Power Steeringlymeng porNo ratings yet
- Peace Corps Small Project Assistance Program USAID Annual Report 1988Document334 pagesPeace Corps Small Project Assistance Program USAID Annual Report 1988Accessible Journal Media: Peace Corps Documents100% (2)
- Download 3000+ Books by Acharya Pt. Shriram SharmaDocument89 pagesDownload 3000+ Books by Acharya Pt. Shriram SharmaAllWorld GaayatreeParivaar SaharunpurNo ratings yet
- KCIS 2nd Semester Science Fair ProjectsDocument2 pagesKCIS 2nd Semester Science Fair ProjectsCaT BlAcKNo ratings yet
- Chapter 3 The Life of Jose Rizal PDFDocument11 pagesChapter 3 The Life of Jose Rizal PDFMelanie CaplayaNo ratings yet
- Stock Market Course ContentDocument12 pagesStock Market Course ContentSrikanth SanipiniNo ratings yet
- Ceramic Foam Filter PDFDocument4 pagesCeramic Foam Filter PDFPaen ZulkifliNo ratings yet
- Biology and Aquaculture of Tilapia-Routledge (2022)Document324 pagesBiology and Aquaculture of Tilapia-Routledge (2022)Pablo Antonio Pintos TeránNo ratings yet