You might also like
- Study of Soft Switching Converter For Switched Reluctance Motor DriveDocument69 pagesStudy of Soft Switching Converter For Switched Reluctance Motor DriveNeeraj ThakurNo ratings yet
- Effect of Rotor Profiles On The Torque of A Switched ReluctaDocument6 pagesEffect of Rotor Profiles On The Torque of A Switched Reluctaapi-19827661No ratings yet
- Design Considerations For Switched Reluctance Motor: Arthur VDocument9 pagesDesign Considerations For Switched Reluctance Motor: Arthur VSuman SahaNo ratings yet
- Influence of Multi-Pulse Rectifier On Power Quality in An Industrial Environment Siyam PSDocument7 pagesInfluence of Multi-Pulse Rectifier On Power Quality in An Industrial Environment Siyam PSsiyam sulaimanNo ratings yet
- Automatic Three Phase Induction Motor Star - Delta Starter: A Project Report Submitted at D N Polytechnic MeerutDocument31 pagesAutomatic Three Phase Induction Motor Star - Delta Starter: A Project Report Submitted at D N Polytechnic MeerutDeepanshu SinghNo ratings yet
- Switched Reluctance MotorDocument52 pagesSwitched Reluctance Motorkoppulabro75% (8)
- Solenoid Engine Project Report 3Document24 pagesSolenoid Engine Project Report 3mrcopy xeroxNo ratings yet
- Solenoid Engine Project Report 3Document24 pagesSolenoid Engine Project Report 3mrcopy xerox100% (1)
- IEEE-TOM - Journal ArticleDocument4 pagesIEEE-TOM - Journal ArticleedumacerenNo ratings yet
- Torque Ripple Analysis of A PM Brushless DC Motor Using Finite Element MethodDocument7 pagesTorque Ripple Analysis of A PM Brushless DC Motor Using Finite Element MethodMoathNo ratings yet
- Ravic Hand Ran 2006Document4 pagesRavic Hand Ran 2006bnbaNo ratings yet
- Jaswant Scopus PaperDocument15 pagesJaswant Scopus PaperpreetivermaeeeNo ratings yet
- Direct Torque Control of Switched Reluctance Motor DrivesDocument65 pagesDirect Torque Control of Switched Reluctance Motor DrivesvarunNo ratings yet
- 2013 - Sensorless Control in SRM Drives For Four Quadrant OperationDocument5 pages2013 - Sensorless Control in SRM Drives For Four Quadrant OperationMarcelo Vinicius de PaulaNo ratings yet
- TJE Miller Design of SRMDocument13 pagesTJE Miller Design of SRMmanasrinuNo ratings yet
- Wireless Power Transfer: Using Magnetic and Electric Resonance Coupling TechniquesFrom EverandWireless Power Transfer: Using Magnetic and Electric Resonance Coupling TechniquesNo ratings yet
- Rotor Slot Distance Effects On Output Parameters in Single Phase Induction MotorsDocument6 pagesRotor Slot Distance Effects On Output Parameters in Single Phase Induction MotorsDr. Aslan JalalNo ratings yet
- Electrical Handbook Formula Book SampleDocument73 pagesElectrical Handbook Formula Book Samplesnitin26100% (2)
- A Sliding Mode Controller For Induction Motor DrivesDocument62 pagesA Sliding Mode Controller For Induction Motor DrivesAkbar aliNo ratings yet
- Electric Vehicle Traction Based On A PM Assisted Synchronous Reluctance MotorDocument6 pagesElectric Vehicle Traction Based On A PM Assisted Synchronous Reluctance Motors2858No ratings yet
- Mitigation of Switching Effects On Induc PDFDocument6 pagesMitigation of Switching Effects On Induc PDFVivek vishwakarmaNo ratings yet
- Sliding Mode Controller For Induction Motor DrivesDocument57 pagesSliding Mode Controller For Induction Motor DrivesSibin G ThomasNo ratings yet
- EHV SRM Control TechnicDocument11 pagesEHV SRM Control Technic20131D5201 ALAMANDA BHARGAVANo ratings yet
- Feedforward Flux-Weakening Control of Surface-Mounted Permanent-Magnet Synchronous Motors Accounting For Resistive Voltage DropDocument10 pagesFeedforward Flux-Weakening Control of Surface-Mounted Permanent-Magnet Synchronous Motors Accounting For Resistive Voltage DropTrần Tấn LộcNo ratings yet
- Electromagnetic Engines Report NewDocument28 pagesElectromagnetic Engines Report NewMad ZedNo ratings yet
- A Project Report ON Vector Control Approach For Switched Reluctance Motor To Mitigate Acoustic NoiseDocument12 pagesA Project Report ON Vector Control Approach For Switched Reluctance Motor To Mitigate Acoustic NoiseKalyan Reddy AnuguNo ratings yet
- Novel Modeling and Damping Technique For Hybrid Stepper MotorDocument11 pagesNovel Modeling and Damping Technique For Hybrid Stepper MotorSathuluri Sambasiva RaoNo ratings yet
- Microcontroller Based Automatic Power Factor Correction in MinesDocument52 pagesMicrocontroller Based Automatic Power Factor Correction in MinesDdumbaNo ratings yet
- Effect of Armature Reaction On The Performance ofDocument3 pagesEffect of Armature Reaction On The Performance ofHamood Saqer AbuobaydaNo ratings yet
- A Seminar ReportDocument28 pagesA Seminar ReportVenkatesh ReddyNo ratings yet
- Mitigation TechniquesDocument59 pagesMitigation TechniquesPrakash ArumugamNo ratings yet
- Rotary and Linear Switched Reluctance MotorsDocument12 pagesRotary and Linear Switched Reluctance Motorskarthikeyan249100% (2)
- Torque VS Vector Angle (SRM)Document6 pagesTorque VS Vector Angle (SRM)piyush PatilNo ratings yet
- Btech Final Year Project Report PDFDocument25 pagesBtech Final Year Project Report PDFShaiz AkhtarNo ratings yet
- 7 - 2017 Prediction of Losses and Efficiency For Three-Phase Induction Machines Equipped With Combined Star-Delta WindingsDocument9 pages7 - 2017 Prediction of Losses and Efficiency For Three-Phase Induction Machines Equipped With Combined Star-Delta WindingsAnonymous Nyv3dRNo ratings yet
- 211ee3336 PDFDocument86 pages211ee3336 PDFGanesan SNo ratings yet
- Mehmet-Adem JestechDocument14 pagesMehmet-Adem JestechMehmet AKBABANo ratings yet
- Vector Control SynRMDocument9 pagesVector Control SynRMMusical CreationsNo ratings yet
- Nagi Seminar BookDocument38 pagesNagi Seminar Booktalari nageswariNo ratings yet
- OfficialDocument40 pagesOfficialADHINAN UMARNo ratings yet
- Design and Simulation of A Servo-Drive Motor Using ANSYS ElectromagneticsDocument13 pagesDesign and Simulation of A Servo-Drive Motor Using ANSYS ElectromagneticsMustafa AlhumayreNo ratings yet
- Design Procedure For Switched-Reluctance Motors: of ofDocument6 pagesDesign Procedure For Switched-Reluctance Motors: of ofSuman SahaNo ratings yet
- 1 Direct InstantaneousDocument6 pages1 Direct InstantaneouskarnatisharathNo ratings yet
- Speed Control of A Switched Reluctance Motor PDFDocument67 pagesSpeed Control of A Switched Reluctance Motor PDFrijilpoothadi50% (2)
- AdepuDocument34 pagesAdepuanilNo ratings yet
- Control of SRM Using 3-Level Neutral Point Diode Clamped Converter With PI and Fuzzy ControllerDocument7 pagesControl of SRM Using 3-Level Neutral Point Diode Clamped Converter With PI and Fuzzy ControllerHarsha VardhanNo ratings yet
- Power Quality Issues and Its Mitigation Techniques: Master of TechnologyDocument59 pagesPower Quality Issues and Its Mitigation Techniques: Master of Technologydaniel assefaNo ratings yet
- Iecon 2019 8926922Document6 pagesIecon 2019 8926922godspower brunoNo ratings yet
- Understanding of InductionDocument6 pagesUnderstanding of InductionmeccayrNo ratings yet
- Magnetic GearDocument28 pagesMagnetic GearGeetha Lekshmi KNo ratings yet
- Optimal Design of Interior Permanent Magnet - Lee - 2013Document6 pagesOptimal Design of Interior Permanent Magnet - Lee - 2013Maycon MaranNo ratings yet
- Simulation of Parallel Connected Induction Motor On A Single InverterDocument81 pagesSimulation of Parallel Connected Induction Motor On A Single InverterMuram DivyaNo ratings yet
- Video 5Document117 pagesVideo 5tupes0231No ratings yet
- Applied Energy: SciencedirectDocument13 pagesApplied Energy: SciencedirectImmawan InsaniNo ratings yet
- Study of Grid Connected Induction Generator For Wind Power ApplicationsDocument33 pagesStudy of Grid Connected Induction Generator For Wind Power Applicationsajit patroNo ratings yet
- Simulation & Fabrication of Axial Flux Brushless DC Motor DriveDocument7 pagesSimulation & Fabrication of Axial Flux Brushless DC Motor DrivePanser PangaribuanNo ratings yet
- Cogging Torque Reduction in An Axial Flux Machine Via Stator Slot Displacement and Skewing PDFDocument9 pagesCogging Torque Reduction in An Axial Flux Machine Via Stator Slot Displacement and Skewing PDFtejas9280No ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Introduction to Bond Graphs and their ApplicationsFrom EverandIntroduction to Bond Graphs and their ApplicationsRating: 5 out of 5 stars5/5 (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- 3 KVL DerivationDocument2 pages3 KVL Derivationsuresh krishnanNo ratings yet
- 5 MicrogridDocument2 pages5 Microgridsuresh krishnanNo ratings yet
- 2RMS and AverageDocument4 pages2RMS and Averagesuresh krishnanNo ratings yet
- 2 ParametersDocument4 pages2 Parameterssuresh krishnanNo ratings yet
- RL Series CircuitDocument12 pagesRL Series Circuitsuresh krishnanNo ratings yet
- ADV No. 3 2023 NewDocument176 pagesADV No. 3 2023 Newsuresh krishnanNo ratings yet
- Induction MotDocument15 pagesInduction Motsuresh krishnanNo ratings yet
- Unit 1 PEDocument60 pagesUnit 1 PEsuresh krishnanNo ratings yet
- Basics of Electrical and Electronics EngineeringDocument14 pagesBasics of Electrical and Electronics Engineeringsuresh krishnanNo ratings yet
- Single Phase Induction MotorDocument11 pagesSingle Phase Induction Motorsuresh krishnanNo ratings yet
- Transactions Template and Instructions On How To Create Your ArticleDocument9 pagesTransactions Template and Instructions On How To Create Your ArticleJavier BarreraNo ratings yet
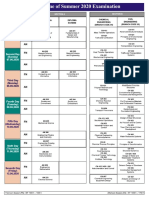
- Programme of Summer 2020 Examination: No Candidate Is Allowed at The Examination Hall Without Valid Iei Identity CardDocument1 pageProgramme of Summer 2020 Examination: No Candidate Is Allowed at The Examination Hall Without Valid Iei Identity Cardsuresh krishnanNo ratings yet
- Seminar ReportDocument22 pagesSeminar Reportsuresh krishnanNo ratings yet
- Modelling, Measurement and Control A: KeywordsDocument8 pagesModelling, Measurement and Control A: Keywordssuresh krishnanNo ratings yet
- Modelling, Measurement and Control A: KeywordsDocument8 pagesModelling, Measurement and Control A: Keywordssuresh krishnanNo ratings yet
- TimetableDocument3 pagesTimetablesuresh krishnanNo ratings yet
- Unit IV Full Material GK DubeyDocument39 pagesUnit IV Full Material GK Dubeysuresh krishnanNo ratings yet
- Assi03032020 PDFDocument57 pagesAssi03032020 PDFtushar goyalNo ratings yet
- Workshop - Lab - Manual PDFDocument53 pagesWorkshop - Lab - Manual PDFsuresh krishnanNo ratings yet
- Papervasu: by Suresh KDocument13 pagesPapervasu: by Suresh Ksuresh krishnanNo ratings yet
- Notice RHQ 21022020 PDFDocument105 pagesNotice RHQ 21022020 PDFPhani FaniNo ratings yet
- New Doc 2020-03-20-10.48.17 PDFDocument7 pagesNew Doc 2020-03-20-10.48.17 PDFsuresh krishnanNo ratings yet
- EEWP ManualDocument88 pagesEEWP Manualsuresh krishnan100% (1)
- TimetableDocument3 pagesTimetablesuresh krishnanNo ratings yet
- SsDocument6 pagesSssuresh krishnanNo ratings yet
- L 24 (Dk& SSG) (Pe) ( (Ee) Nptel)Document15 pagesL 24 (Dk& SSG) (Pe) ( (Ee) Nptel)Abhi NáyNo ratings yet
- EEWP ManualDocument88 pagesEEWP Manualsuresh krishnan100% (1)
- 1EEWP CoverDocument1 page1EEWP Coversuresh krishnanNo ratings yet
- Operation Manual X-Ray Tube Assembly 0.7/1.3U163C-36Document40 pagesOperation Manual X-Ray Tube Assembly 0.7/1.3U163C-36Aknouch AbdelmoujibNo ratings yet
- J. J. Holmes, Exploitation of A Ship's Magnetic Field Signatures © Springer Nature Switzerland AG 2006Document2 pagesJ. J. Holmes, Exploitation of A Ship's Magnetic Field Signatures © Springer Nature Switzerland AG 2006Anish MarkoseNo ratings yet
- Transformer Manufacturing Process Training ReportDocument74 pagesTransformer Manufacturing Process Training ReportUmamaheshwarrao VarmaNo ratings yet
- Worksheet 011Document2 pagesWorksheet 011Sabine MohamadNo ratings yet
- EasyPact TVS Contactors - LC1E1810M7 PDFDocument3 pagesEasyPact TVS Contactors - LC1E1810M7 PDFReynaldo HutomoNo ratings yet
- E7 - Ch02 - The Photoelectric Effect - FS - eDocument15 pagesE7 - Ch02 - The Photoelectric Effect - FS - eKenny LauNo ratings yet
- Mathematical Modelling of Electromechanical Systems PPT PSDDocument8 pagesMathematical Modelling of Electromechanical Systems PPT PSDNoviaNo ratings yet
- Lightolier Lightstyles Brochure 1989Document148 pagesLightolier Lightstyles Brochure 1989Alan Masters100% (1)
- PHY 124 CorrectedDocument161 pagesPHY 124 CorrectedAkingboye Maxwell100% (1)
- Ieee std43 2000 PDFDocument27 pagesIeee std43 2000 PDFGheorghe BogdanNo ratings yet
- AC MachinesDocument8 pagesAC Machinesprince ian cruzNo ratings yet
- Phase-IV: - PhysicsDocument15 pagesPhase-IV: - PhysicsAnish LahiriNo ratings yet
- Machine Terminals REM 543 REM 545: Technical Data (Cont D)Document10 pagesMachine Terminals REM 543 REM 545: Technical Data (Cont D)Jeremy RathanumNo ratings yet
- As 60034.1-2009 Rotating Electrical Machines Rating and Performance (IEC 60034-1 Ed. 11 (2004) MOD)Document10 pagesAs 60034.1-2009 Rotating Electrical Machines Rating and Performance (IEC 60034-1 Ed. 11 (2004) MOD)SAI Global - APAC29% (7)
- Ultrasonic Examination: AusteniticweldsDocument7 pagesUltrasonic Examination: Austeniticweldsthanhtung156No ratings yet
- Solutions Manual For Electromechanical Dynamics: Mit OpencoursewareDocument171 pagesSolutions Manual For Electromechanical Dynamics: Mit OpencoursewareJason JiaNo ratings yet
- Generator & AuxDocument27 pagesGenerator & AuxK R Kumar RanjanNo ratings yet
- 11 - 03HV Air Load Break SwitchesDocument11 pages11 - 03HV Air Load Break SwitchesThái Ngô ĐăngNo ratings yet
- Lesson Plan Properties of MaterialsDocument1 pageLesson Plan Properties of MaterialsJoanne100% (1)
- # Definitions Terms: Book Review Electronics Principle by MalvinoDocument245 pages# Definitions Terms: Book Review Electronics Principle by Malvinomanse yukiNo ratings yet
- 30 AWG Cable DATA SheetDocument2 pages30 AWG Cable DATA SheetTuýp Phờ NờNo ratings yet
- Lect 04 - CH 08 Static Magnetic Field - Part 1 - HW3Document46 pagesLect 04 - CH 08 Static Magnetic Field - Part 1 - HW3YeasminNo ratings yet
- IEEE Recommended Practice For Testing Insulation ResistanceDocument1 pageIEEE Recommended Practice For Testing Insulation Resistancealvin meNo ratings yet
- SlayyDocument16 pagesSlayyAsli GoncNo ratings yet
- Xii Unit Test - 2 (8.9.21)Document12 pagesXii Unit Test - 2 (8.9.21)PREJAN RAJANo ratings yet
- 11th Topicals RAWDocument505 pages11th Topicals RAWmkhantareen78No ratings yet
- Beg 2105 Physical Electronics I - 1 IntroDocument166 pagesBeg 2105 Physical Electronics I - 1 IntroElias keNo ratings yet
- Fizik Kertas 2 SPM Trial Johor 2021Document12 pagesFizik Kertas 2 SPM Trial Johor 2021SITI ARBAIYAH BINTI AHMAD MoeNo ratings yet
- Effect of Accelerated Aging Under High Electric Field and Partial Discharges On Electric Conduction in Mineral OilDocument9 pagesEffect of Accelerated Aging Under High Electric Field and Partial Discharges On Electric Conduction in Mineral OilMuhammad Irfan NazhmiNo ratings yet
- Spsebs1202 SeriesDocument38 pagesSpsebs1202 SeriesJuple My IguanaNo ratings yet