You might also like
- Week 7 Truss DesignDocument39 pagesWeek 7 Truss DesignFoo He XuanNo ratings yet
- Interaction Diagram For Concrete ColumnsDocument14 pagesInteraction Diagram For Concrete Columnsgeogohigh100% (1)
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionFrom EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionRating: 2.5 out of 5 stars2.5/5 (4)
- 8.anchor Design Methodology (P10-13)Document4 pages8.anchor Design Methodology (P10-13)jamesstewartNo ratings yet
- Module 3 - Flexural Strength in Beams (WSD & Cracked Sections - Tansformed Section Method)Document5 pagesModule 3 - Flexural Strength in Beams (WSD & Cracked Sections - Tansformed Section Method)Mika Vernadeth SingNo ratings yet
- Column Design Aci Code PDFDocument15 pagesColumn Design Aci Code PDFPhil MarceloNo ratings yet
- Ship Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesFrom EverandShip Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesRating: 5 out of 5 stars5/5 (3)
- Assessment of RC Columns Under Combined Biaxial Bending and Axial LoadDocument13 pagesAssessment of RC Columns Under Combined Biaxial Bending and Axial Loadmustafa mustafaNo ratings yet
- CSE30310 Lecture 3Document47 pagesCSE30310 Lecture 3sze yin wongNo ratings yet
- Wood ArmerDocument14 pagesWood ArmerMarek100% (1)
- MAE 212 Module III: Characterizing Material Properties with Strain GagesDocument7 pagesMAE 212 Module III: Characterizing Material Properties with Strain GagesChulbul PandeyNo ratings yet
- Design and Analysis For ShearDocument20 pagesDesign and Analysis For Shearhonesto reynaNo ratings yet
- Extracts From Ec3 For Students 2012Document6 pagesExtracts From Ec3 For Students 2012Alexandru MarincuNo ratings yet
- Chapter 5 PDFDocument5 pagesChapter 5 PDFWendimu TolessaNo ratings yet
- Beam-To-Beam Joints With Bolted End-Plate Connections Concerning Steel Platforms Angra 2 NPPDocument10 pagesBeam-To-Beam Joints With Bolted End-Plate Connections Concerning Steel Platforms Angra 2 NPPihpeterNo ratings yet
- Numerical Study Shear IIDocument28 pagesNumerical Study Shear IINachoNo ratings yet
- Solution 4 & 5: Ntnu TMR 4195 Design of Offshore StructuresDocument12 pagesSolution 4 & 5: Ntnu TMR 4195 Design of Offshore StructuresflcwkNo ratings yet
- Eurocode Verification of A Runway Beam Subject To Wheel Loads - Part 1Document3 pagesEurocode Verification of A Runway Beam Subject To Wheel Loads - Part 1José Miguel BarataNo ratings yet
- Gusset 3.1. in Tension 3.1.1 TenDocument6 pagesGusset 3.1. in Tension 3.1.1 TenKARTHIK SGNo ratings yet
- SP 105-2015-PartDocument14 pagesSP 105-2015-Part2BA19CV059 Rakshita SarangmathNo ratings yet
- Chapter 4Document26 pagesChapter 4gilbert850507No ratings yet
- ANALYSIS OF SECTIONS AND STRESS-STRAIN RELATIONSHIPSDocument18 pagesANALYSIS OF SECTIONS AND STRESS-STRAIN RELATIONSHIPSisaacssebulibaNo ratings yet
- Application for Design of Members in Tension and BendingDocument48 pagesApplication for Design of Members in Tension and BendingVictor TvvNo ratings yet
- Strengthen Concrete with PrestressingDocument13 pagesStrengthen Concrete with PrestressingMAINA ANTONY WAMBUGUNo ratings yet
- SN017 (NCCI - Shear Resistance of A Fin Plate Connection)Document13 pagesSN017 (NCCI - Shear Resistance of A Fin Plate Connection)Hamati Rami100% (2)
- Shear Forces in Beams: ACI318-19 vs Eurocode 2 ComparisonDocument24 pagesShear Forces in Beams: ACI318-19 vs Eurocode 2 ComparisonSangamesh BachaneNo ratings yet
- 0250 PDFDocument8 pages0250 PDFGREATANo ratings yet
- Bond, Development Length and DuctilityDocument57 pagesBond, Development Length and DuctilityRewanta RegmiNo ratings yet
- Self Weight Deflection of Circular PlatesDocument8 pagesSelf Weight Deflection of Circular PlatesJay KumarNo ratings yet
- Ribs Influence on Elastic Buckling of TubesDocument9 pagesRibs Influence on Elastic Buckling of TubesWaseem AkramNo ratings yet
- CORBEL DESIGNDocument13 pagesCORBEL DESIGNAshraf ZayedNo ratings yet
- Design of Beams To BS 8110Document14 pagesDesign of Beams To BS 8110YAHAMPATH ARACHCHIGE PASAN MADURA YahampathNo ratings yet
- Design For Flexure-WsdDocument10 pagesDesign For Flexure-WsdRichard TagleNo ratings yet
- RCC BeamsDocument24 pagesRCC BeamsAMIE Study Circle, RoorkeeNo ratings yet
- RCC Lecture Series 2 2018-19 PDFDocument41 pagesRCC Lecture Series 2 2018-19 PDFMansa ArthurNo ratings yet
- Deep BeamDocument7 pagesDeep BeamTemesgenNo ratings yet
- ME302: Materials Mechanics: Chap. 1 Stress (3) Chap. 2 StrainDocument24 pagesME302: Materials Mechanics: Chap. 1 Stress (3) Chap. 2 StrainMat MatttNo ratings yet
- KKKH3353 - Structural Steel Design - Joints 2Document26 pagesKKKH3353 - Structural Steel Design - Joints 2Zeyad Tareq Al SaroriNo ratings yet
- Fast Matlab Based Finite Element Solver For The Problem of Bending of Mindlin PlatesDocument14 pagesFast Matlab Based Finite Element Solver For The Problem of Bending of Mindlin Plates帅华蒋No ratings yet
- Strength Curves For Metal Plates in CompressionDocument36 pagesStrength Curves For Metal Plates in Compressionlcm327No ratings yet
- Ex2 - RestrainedBeam Lessen 2 Steel DesignDocument18 pagesEx2 - RestrainedBeam Lessen 2 Steel DesignMohammad HegazyNo ratings yet
- Column Steel DesignDocument37 pagesColumn Steel DesignIlya Joohari100% (1)
- Workshop-2: Atafreshi@manchester - Ac.uk The University of ManchesterDocument7 pagesWorkshop-2: Atafreshi@manchester - Ac.uk The University of ManchesterMarlon OrdoñezNo ratings yet
- Bending Resistance of A Slender Plate Girder With Longitudinal StiffenerDocument5 pagesBending Resistance of A Slender Plate Girder With Longitudinal StiffenerGogyNo ratings yet
- 5 Ultimate Theory For Combined Axial Load and Bending For RC ElementsDocument9 pages5 Ultimate Theory For Combined Axial Load and Bending For RC ElementsMAINA ANTONY WAMBUGUNo ratings yet
- Design of Beams Miscellaneous Topics (Shear, Deflection, Etc.)Document37 pagesDesign of Beams Miscellaneous Topics (Shear, Deflection, Etc.)Morad AJNo ratings yet
- Design of Water Tanks: by Dr. G.S.Suresh, Professor, Civil Engineering Department, NIE, MysoreDocument24 pagesDesign of Water Tanks: by Dr. G.S.Suresh, Professor, Civil Engineering Department, NIE, MysoreKawan EngNo ratings yet
- Chapter 3 Column and Compression MembersDocument60 pagesChapter 3 Column and Compression Membersbihanba100% (1)
- Bolt ConnectionsDocument25 pagesBolt ConnectionsPhanathon OunonNo ratings yet
- AZ024 Lecture 3 (Rev (1) A)Document12 pagesAZ024 Lecture 3 (Rev (1) A)Tong Kin Lun100% (4)
- UEMX 2353 Concrete Structures Design IDocument50 pagesUEMX 2353 Concrete Structures Design Iprixie1No ratings yet
- Corbel DesignDocument31 pagesCorbel DesignAshraf ZayedNo ratings yet
- Lab Sheet For Ultimate Strength of Reinforced Concrete BeamsDocument6 pagesLab Sheet For Ultimate Strength of Reinforced Concrete BeamsAbdirahman RobaNo ratings yet
- Tension Members 2022Document44 pagesTension Members 2022ahmadlbraheem0987No ratings yet
- Plate Girder Design (Strength and Deflections) : 9.1. Static AnalysisDocument4 pagesPlate Girder Design (Strength and Deflections) : 9.1. Static AnalysisAnonymous b9fkTYfEoRNo ratings yet
- Watertank GS PDFDocument24 pagesWatertank GS PDFManoj RautNo ratings yet
- 3 - RueggDocument19 pages3 - RueggMislav JukićNo ratings yet
- Why Buildings Fall Down How Structures FailDocument333 pagesWhy Buildings Fall Down How Structures Failhessian123100% (3)
- Sin Cos Sinω Sin Cos Cos Sinω Cos Ω Sin Ω Cos: Metoda Interpolacije Uzbudne SileDocument1 pageSin Cos Sinω Sin Cos Cos Sinω Cos Ω Sin Ω Cos: Metoda Interpolacije Uzbudne SileMislav JukićNo ratings yet
- Installer InputDocument5 pagesInstaller InputMislav JukićNo ratings yet
- 4.7.5 Walls: CK Yk CKDocument2 pages4.7.5 Walls: CK Yk CKBertin BakariNo ratings yet
- Diversarum Speculationum Mathematicarum Et Physicarum LiberDocument644 pagesDiversarum Speculationum Mathematicarum Et Physicarum LiberRobert UribeNo ratings yet
- Profil Paparan Radiasi Instalasi Radiologi - Dwi RochmayantiDocument5 pagesProfil Paparan Radiasi Instalasi Radiologi - Dwi RochmayantiFadila Nur'AeniNo ratings yet
- Forces 1.5 ExplainedDocument4 pagesForces 1.5 ExplainedweeweeweeweeNo ratings yet
- April 14Document7 pagesApril 14rossana rondaNo ratings yet
- Chemical Engineering Science: T.L. Rodgers, L. Gangolf, C. Vannier, M. Parriaud, M. CookeDocument10 pagesChemical Engineering Science: T.L. Rodgers, L. Gangolf, C. Vannier, M. Parriaud, M. CookeYusrilNo ratings yet
- 3 APH PERFORMANCE in NTPC STATIONS AjaySharmaDocument15 pages3 APH PERFORMANCE in NTPC STATIONS AjaySharmaDSGNo ratings yet
- VICAT TEST REPORTDocument7 pagesVICAT TEST REPORTKhalid MohammadNo ratings yet
- Free Surface Modeling Methods - CFD-101 - FLOW-3DDocument7 pagesFree Surface Modeling Methods - CFD-101 - FLOW-3Dcopdeposu2071No ratings yet
- Ficha-Tecnica-Cheetah JKM390-410M-72H - (V)Document2 pagesFicha-Tecnica-Cheetah JKM390-410M-72H - (V)fasolis2No ratings yet
- Lecture - 5 Free Undamped SDOF Systems - Solutions With The Energy MethodDocument8 pagesLecture - 5 Free Undamped SDOF Systems - Solutions With The Energy MethodMark Gabriel CayatNo ratings yet
- Lab Report FinalDocument7 pagesLab Report Finalfrancis mbuguaNo ratings yet
- PD 6695 - 2 - 2008Document94 pagesPD 6695 - 2 - 2008William Harrow100% (2)
- Q2 - Module 1 PDFDocument33 pagesQ2 - Module 1 PDFdem dorothy bosqueNo ratings yet
- Ada Villafafila Garcia, Ph.d.Document249 pagesAda Villafafila Garcia, Ph.d.Alberto Vázquez ContrerasNo ratings yet
- 1.4.3 Practice - Intro To TrigDocument3 pages1.4.3 Practice - Intro To TrigCorrelanderNo ratings yet
- Kruger Optics Catalog 2010Document12 pagesKruger Optics Catalog 2010NickchiosNo ratings yet
- Experimental Analysis of E-Glass /epoxy & E-Glass /polyester Composites For Auto Body PanelDocument8 pagesExperimental Analysis of E-Glass /epoxy & E-Glass /polyester Composites For Auto Body PanelmusebladeNo ratings yet
- TWI UT Training Question Bank UltrasonicDocument85 pagesTWI UT Training Question Bank UltrasonicENOD CONTROL E INSPECCION S.A.C.No ratings yet
- Introductory Chemistry An Atoms First Approach 1st Edition Burdge Solutions ManualDocument32 pagesIntroductory Chemistry An Atoms First Approach 1st Edition Burdge Solutions Manualduongvalerie9rkb3100% (31)
- Freefall and Weightlessness FinalDocument11 pagesFreefall and Weightlessness FinalAsmithaa GopinathNo ratings yet
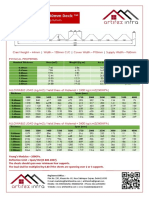
- ARTIFEX INFRA - 44mm Decksheet ProfileDocument1 pageARTIFEX INFRA - 44mm Decksheet ProfileAmit SharmaNo ratings yet
- The Giroud and Noiray MethodDocument10 pagesThe Giroud and Noiray MethodCarlos CorreiaNo ratings yet
- n65619 Solutionsheet Opacimeter E WebDocument2 pagesn65619 Solutionsheet Opacimeter E WebRichardNo ratings yet
- 10 PhysicsDocument4 pages10 PhysicsNicka Asereht MinaNo ratings yet
- Fundamentals and Principles of Soil MechanicsDocument13 pagesFundamentals and Principles of Soil Mechanicshuhu heheNo ratings yet
- Day 3 - HW Test Review SOL G.14 Practice 3 - Similar SolidsDocument3 pagesDay 3 - HW Test Review SOL G.14 Practice 3 - Similar SolidsRyan AndersonNo ratings yet
- Newton's Absolute Space Echoed Dumbleton's Imaginary SpaceDocument21 pagesNewton's Absolute Space Echoed Dumbleton's Imaginary SpacerickNo ratings yet
- BROCHURE Linseis-Dilatometer-Vertical-and-Horizontal-Analyzer - NEW - JTDocument24 pagesBROCHURE Linseis-Dilatometer-Vertical-and-Horizontal-Analyzer - NEW - JTalex_antitodoNo ratings yet
- 1999 - Hassani e Hinton - Homogenization and Structural Topology OptimizationDocument279 pages1999 - Hassani e Hinton - Homogenization and Structural Topology OptimizationmggllNo ratings yet
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (137)
- Advanced Modelling Techniques in Structural DesignFrom EverandAdvanced Modelling Techniques in Structural DesignRating: 5 out of 5 stars5/5 (3)
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsFrom EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNo ratings yet
- Climate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingFrom EverandClimate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingNo ratings yet
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Transmission Pipeline Calculations and Simulations ManualFrom EverandTransmission Pipeline Calculations and Simulations ManualRating: 4.5 out of 5 stars4.5/5 (10)
- Pipeline Planning and Construction Field ManualFrom EverandPipeline Planning and Construction Field ManualRating: 5 out of 5 stars5/5 (3)
- Experiment and Calculation of Reinforced Concrete at Elevated TemperaturesFrom EverandExperiment and Calculation of Reinforced Concrete at Elevated TemperaturesRating: 5 out of 5 stars5/5 (2)
- Engineering for Kids: Building and Construction Fun | Children's Engineering BooksFrom EverandEngineering for Kids: Building and Construction Fun | Children's Engineering BooksRating: 3 out of 5 stars3/5 (2)
- Advanced Design Examples of Seismic Retrofit of StructuresFrom EverandAdvanced Design Examples of Seismic Retrofit of StructuresRating: 1 out of 5 stars1/5 (1)
- Piezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringFrom EverandPiezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringNo ratings yet
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresFrom EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresRating: 1 out of 5 stars1/5 (2)
- Building Support Structures, 2nd Ed., Analysis and Design with SAP2000 SoftwareFrom EverandBuilding Support Structures, 2nd Ed., Analysis and Design with SAP2000 SoftwareRating: 4.5 out of 5 stars4.5/5 (15)
- Marine Structural Design CalculationsFrom EverandMarine Structural Design CalculationsRating: 4.5 out of 5 stars4.5/5 (13)
- Pile Design and Construction Rules of ThumbFrom EverandPile Design and Construction Rules of ThumbRating: 4.5 out of 5 stars4.5/5 (15)
- Structural Cross Sections: Analysis and DesignFrom EverandStructural Cross Sections: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (19)
- Offshore Pipelines: Design, Installation, and MaintenanceFrom EverandOffshore Pipelines: Design, Installation, and MaintenanceRating: 4.5 out of 5 stars4.5/5 (2)
- Built: The Hidden Stories Behind Our StructuresFrom EverandBuilt: The Hidden Stories Behind Our StructuresRating: 4 out of 5 stars4/5 (27)