You might also like
- Wrong Answer SummaryDocument12 pagesWrong Answer Summarykizer sizemore100% (7)
- Lightweight Survey and Inclining ExperimentDocument24 pagesLightweight Survey and Inclining ExperimentFrankieNo ratings yet
- Beam Deflection 4th Order MethodDocument8 pagesBeam Deflection 4th Order Methodmiry89No ratings yet
- The Adventure of The Gloria ScottDocument3 pagesThe Adventure of The Gloria ScottantonorosaNo ratings yet
- Stability Program ManualDocument127 pagesStability Program ManualАнжелика ДаникNo ratings yet
- Week 11Document30 pagesWeek 11Ian MumwayaNo ratings yet
- Notes gr20Document77 pagesNotes gr20MatejaBoskovicNo ratings yet
- Lectures On General Relativity: Mehrdad Mirbabayi ICTP Diploma Program, 2018Document76 pagesLectures On General Relativity: Mehrdad Mirbabayi ICTP Diploma Program, 2018MatejaBoskovicNo ratings yet
- Manual SDocument7 pagesManual SSarinaNo ratings yet
- The Transverse Dynamic Stability of Hard-Chine Planing Craft PDFDocument12 pagesThe Transverse Dynamic Stability of Hard-Chine Planing Craft PDFДмитрий КирзуновNo ratings yet
- Closed-Loop Endoatmospheric Ascent GuidanceDocument10 pagesClosed-Loop Endoatmospheric Ascent GuidanceBonzi BuddyNo ratings yet
- AngmomDocument29 pagesAngmomYılmaz ÇolakNo ratings yet
- Lifting Line Theory Tutorial ExampleDocument17 pagesLifting Line Theory Tutorial ExampleGareth VioNo ratings yet
- 2te Bereicht EntwurfDocument15 pages2te Bereicht EntwurfmandbackNo ratings yet
- Chapter 11 Collision Theory: 11.1 Center of Mass Reference FrameDocument18 pagesChapter 11 Collision Theory: 11.1 Center of Mass Reference FrameTanmoy RoyNo ratings yet
- 2022 Kybernetika UROVDocument17 pages2022 Kybernetika UROVRalph Gerard SangalangNo ratings yet
- CHAPTER-2 Intoduction To ModelingDocument51 pagesCHAPTER-2 Intoduction To Modelingይታገሡ ተሥፋዬNo ratings yet
- Sliding Mode Control of Rotary Inverted PendulumDocument5 pagesSliding Mode Control of Rotary Inverted Pendulumlaila AZZOUZINo ratings yet
- IImscchem 18pch8 Unit4 SVDocument11 pagesIImscchem 18pch8 Unit4 SVWaheed Ahmad100% (1)
- Wiener Filtering: C °alan V. Oppenheim and George C. Verghese, 2010 195Document17 pagesWiener Filtering: C °alan V. Oppenheim and George C. Verghese, 2010 195ismaiba97No ratings yet
- Simulation and Dynamic Analysis of Remotely Operated Vehicle (ROV) Using PID Controller For Pitch MovementDocument9 pagesSimulation and Dynamic Analysis of Remotely Operated Vehicle (ROV) Using PID Controller For Pitch Movementahsikhan007No ratings yet
- Ch. 11 BothDocument35 pagesCh. 11 Bothroba rrNo ratings yet
- Numerical Wave Tank For Study Seakeeping of Amphibious VehicleDocument4 pagesNumerical Wave Tank For Study Seakeeping of Amphibious VehicleBinod KumarNo ratings yet
- s00006 016 0722 6 PDFDocument25 pagess00006 016 0722 6 PDFZow NiakNo ratings yet
- QFT BoccioDocument63 pagesQFT Bocciounima3610No ratings yet
- Eb001225 03Document10 pagesEb001225 03Tanvir ShovonNo ratings yet
- 11.2: Rolling Motion: Learning ObjectivesDocument7 pages11.2: Rolling Motion: Learning ObjectivesAbdul AzizNo ratings yet
- Chapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Document73 pagesChapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Patrick SibandaNo ratings yet
- Pitch Dynamics of Saturn-V Launch VehicleDocument39 pagesPitch Dynamics of Saturn-V Launch Vehiclemehtab barkatNo ratings yet
- EEE312 Lab Sheet 3 Revised - SumDocument8 pagesEEE312 Lab Sheet 3 Revised - SumMasud SarkerNo ratings yet
- Kuli Stokes NavierDocument6 pagesKuli Stokes NavierZeitnutzungNo ratings yet
- Air Drag On Pendula and Chaos in The Double PendulumDocument21 pagesAir Drag On Pendula and Chaos in The Double PendulumMr. XcoderNo ratings yet
- General Relativity 4Document13 pagesGeneral Relativity 4HarshitNo ratings yet
- Spherical TensorDocument7 pagesSpherical TensormarshadjaferNo ratings yet
- Tao Xing, Pablo Carrica, and Fred SternDocument11 pagesTao Xing, Pablo Carrica, and Fred Sternalagarg137691No ratings yet
- Chapter 11 (11-23-04)Document61 pagesChapter 11 (11-23-04)sruthimeena6891No ratings yet
- 1.1 D Landau Level EigenstatesDocument8 pages1.1 D Landau Level EigenstatesahsbonNo ratings yet
- Measure of The Propagation Velocity of Transversal and Longitudinal Ultrasonic Waves in An Isotropic Solid: Determination of Elastic and Viscoelastic Constants.Document8 pagesMeasure of The Propagation Velocity of Transversal and Longitudinal Ultrasonic Waves in An Isotropic Solid: Determination of Elastic and Viscoelastic Constants.It's WafaNo ratings yet
- Coriolis Acceleration Is FicticiousDocument5 pagesCoriolis Acceleration Is FicticiousJoseph StanovskyNo ratings yet
- Turbulence Modelling For Rotating FlowsDocument26 pagesTurbulence Modelling For Rotating FlowsAnonymous scnl9rHNo ratings yet
- Serie 1 Aufgaben enDocument3 pagesSerie 1 Aufgaben enHong Chul NamNo ratings yet
- Damianov Dragos FEM RepDocument23 pagesDamianov Dragos FEM RepDragos DamNo ratings yet
- Rasheef Maths AssignmantDocument10 pagesRasheef Maths AssignmantMohamed SanoosNo ratings yet
- 0338 C11 PDFDocument14 pages0338 C11 PDFVerónicaNo ratings yet
- Cantilever Beam VibrationDocument8 pagesCantilever Beam VibrationKurtNo ratings yet
- Chapter 11 - Equilibrium and Elasticity (Physics)Document16 pagesChapter 11 - Equilibrium and Elasticity (Physics)SaiNo ratings yet
- Calculation of Shock Response Spectrum: Abstract: As It Is Stated in The ISO 18431-4 Standard, A ShockDocument6 pagesCalculation of Shock Response Spectrum: Abstract: As It Is Stated in The ISO 18431-4 Standard, A ShockMansi ShahNo ratings yet
- Two-Dimensional Airfoil TheoryDocument28 pagesTwo-Dimensional Airfoil TheoryNavaneeth Krishnan BNo ratings yet
- Assignment 3Document3 pagesAssignment 3SarthakNo ratings yet
- Lect 11Document13 pagesLect 11Nyan Linn AungNo ratings yet
- Ships DynamicDocument18 pagesShips Dynamicanilsingh1983100% (1)
- Developments of The Extended RelativityDocument85 pagesDevelopments of The Extended RelativityaliakouNo ratings yet
- Dynamics: 1 !2007 by Roderic GrupenDocument11 pagesDynamics: 1 !2007 by Roderic GrupensircovalskyNo ratings yet
- Problem 10.49Document3 pagesProblem 10.49台師大陳彥穎No ratings yet
- Introduction. The Present Paper Contains Further Developments For TheDocument22 pagesIntroduction. The Present Paper Contains Further Developments For TheCiprian ComanNo ratings yet
- 8403 PDF Ch11aDocument38 pages8403 PDF Ch11aGhania Nashwa FairuzaNo ratings yet
- E3.07 DSP 2000Document20 pagesE3.07 DSP 2000Mustafamna Al SalamNo ratings yet
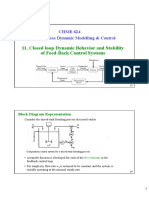
- Closed Loop Dynamic Behavior and Stability of Feed-Back Control SystemsDocument21 pagesClosed Loop Dynamic Behavior and Stability of Feed-Back Control Systemsali aljifriNo ratings yet
- Design of A Non-Linear Hybrid Car Suspension System Using Neural NetworksDocument10 pagesDesign of A Non-Linear Hybrid Car Suspension System Using Neural NetworksEmir AcevedoNo ratings yet
- Mechatronics II Laboratory: Experiment #1: Force and Torque SensorsDocument6 pagesMechatronics II Laboratory: Experiment #1: Force and Torque SensorsGoran MiljkovicNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- AdadasdDocument6 pagesAdadasdABHIROOP KNo ratings yet
- AsdsdDocument4 pagesAsdsdABHIROOP KNo ratings yet
- Rāmāya A: This Article Is About The Sanskrit Epic. For Other Uses, SeeDocument6 pagesRāmāya A: This Article Is About The Sanskrit Epic. For Other Uses, SeeABHIROOP KNo ratings yet
- DasasdsDocument5 pagesDasasdsABHIROOP KNo ratings yet
- Nepal: HukamDocument4 pagesNepal: HukamABHIROOP KNo ratings yet
- Cultural Festival: Celebrations, Rituals and PracticesDocument5 pagesCultural Festival: Celebrations, Rituals and PracticesABHIROOP KNo ratings yet
- AdsdDocument3 pagesAdsdABHIROOP KNo ratings yet
- Bāla Kā A: Bala KandaDocument4 pagesBāla Kā A: Bala KandaABHIROOP KNo ratings yet
- Jagamohana Ramayana: Early Medieval Recension From BengalDocument3 pagesJagamohana Ramayana: Early Medieval Recension From BengalABHIROOP KNo ratings yet
- Yuddha Kanda: Hanuman Assumes Gandharva MainakaDocument4 pagesYuddha Kanda: Hanuman Assumes Gandharva MainakaABHIROOP KNo ratings yet
- Albion Marine Deckhouse: AdvantagesDocument1 pageAlbion Marine Deckhouse: AdvantagesABHIROOP KNo ratings yet
- History: Onam (Document6 pagesHistory: Onam (ABHIROOP KNo ratings yet
- Granular Material Dip: Type of Cargo Angle of ReposeDocument9 pagesGranular Material Dip: Type of Cargo Angle of ReposeABHIROOP KNo ratings yet
- Equation Value Applicability /source: T T L LDocument3 pagesEquation Value Applicability /source: T T L LABHIROOP KNo ratings yet
- For Two Node Vertical Vibration, Hull FrequencyDocument3 pagesFor Two Node Vertical Vibration, Hull FrequencyABHIROOP KNo ratings yet
- Various Bulk Carrier SizesDocument6 pagesVarious Bulk Carrier SizesABHIROOP KNo ratings yet
- Collecting Cargo and Port InformationDocument5 pagesCollecting Cargo and Port InformationABHIROOP KNo ratings yet
- 2A: Initial Gmo GM at 0.0 Deg 7.380 MDocument2 pages2A: Initial Gmo GM at 0.0 Deg 7.380 MABHIROOP KNo ratings yet
- Literature Review: Bulk Carrier TypesDocument5 pagesLiterature Review: Bulk Carrier TypesABHIROOP KNo ratings yet
- 1.homogeneous Hold Loading ConditionsDocument6 pages1.homogeneous Hold Loading ConditionsABHIROOP KNo ratings yet
- 4 (Parentship Graph)Document2 pages4 (Parentship Graph)ABHIROOP KNo ratings yet
- Figure 3.3: B Versus DWT Figure 3.4: D Versus DWT: DWT (T) DWT (T)Document2 pagesFigure 3.3: B Versus DWT Figure 3.4: D Versus DWT: DWT (T) DWT (T)ABHIROOP KNo ratings yet
- 5.3 Hydrostatic CalculationsDocument4 pages5.3 Hydrostatic CalculationsABHIROOP KNo ratings yet
- 10.6 Damaged Stability: 1 DWT - Engine Room DamagedDocument1 page10.6 Damaged Stability: 1 DWT - Engine Room DamagedABHIROOP KNo ratings yet
- Sect. Area AmidshipsDocument3 pagesSect. Area AmidshipsABHIROOP KNo ratings yet
- T F 1 App W B TR ADocument7 pagesT F 1 App W B TR AABHIROOP KNo ratings yet
- General ArrangementDocument17 pagesGeneral ArrangementABHIROOP KNo ratings yet
- Speed (M/S)Document3 pagesSpeed (M/S)ABHIROOP KNo ratings yet
- Perkins All Models Full Manuals DVDDocument25 pagesPerkins All Models Full Manuals DVDmissrebeccacolon240796mxe100% (114)
- EID 6264 Export Process ContainerDocument3 pagesEID 6264 Export Process ContaineraeeeNo ratings yet
- Basic Sailing SkillsDocument1 pageBasic Sailing SkillsstympytinusNo ratings yet
- Mooring Master VacancyDocument2 pagesMooring Master VacancyAnonymous UCveMQNo ratings yet
- INTERTANKO BW Entry CommentaryDocument15 pagesINTERTANKO BW Entry CommentaryPaurush Kumar Singh100% (1)
- Derwentwater Walk MapDocument1 pageDerwentwater Walk MapsteNo ratings yet
- DNVGL CG 0285Document130 pagesDNVGL CG 0285Vincent KohNo ratings yet
- Product Sheet Transshipment Crane Barge 6324 Harvest DanubeDocument2 pagesProduct Sheet Transshipment Crane Barge 6324 Harvest DanubeEnquiry DESH ShipbuildingNo ratings yet
- The Ship of The Dead - Elric RPGDocument4 pagesThe Ship of The Dead - Elric RPGNaze MaartenNo ratings yet
- I-Boat CaptainDocument313 pagesI-Boat CaptainVictor Rojo SobrepeñaNo ratings yet
- cw-420 Rigging GuideDocument11 pagescw-420 Rigging GuideSAK SANo ratings yet
- MN INDEX-minDocument1 pageMN INDEX-minDeepakNo ratings yet
- Memorandum of Agreement: Saleform 1987Document5 pagesMemorandum of Agreement: Saleform 1987Sahil FarazNo ratings yet
- SOL 029 Minimum Safe Manning Document - Rev. 2Document22 pagesSOL 029 Minimum Safe Manning Document - Rev. 2Pasin WestNo ratings yet
- Petronas Technical Standards: Offshore Refurbished StructuresDocument14 pagesPetronas Technical Standards: Offshore Refurbished StructuresFirdausi FauziNo ratings yet
- Undang-Undang Laut Melaka: FABC2092 Constitution & CommunityDocument18 pagesUndang-Undang Laut Melaka: FABC2092 Constitution & CommunityIman Syakirah100% (3)
- Nedlloyd Vespucci and WahkunaDocument58 pagesNedlloyd Vespucci and WahkunaLyubomir IvanovNo ratings yet
- Christopher ColumbusDocument5 pagesChristopher ColumbusJosh ChakravartyNo ratings yet
- Rdana FormDocument6 pagesRdana FormApolluz VasquezNo ratings yet
- Life Raft Release System and Launching Procedure Marine InsightDocument8 pagesLife Raft Release System and Launching Procedure Marine Insightmavericksailor100% (1)
- Transportation Law Cases Full TextDocument256 pagesTransportation Law Cases Full TextDan LocsinNo ratings yet
- 1000 Tank Types and CalibrationDocument24 pages1000 Tank Types and CalibrationmilecsaNo ratings yet
- Filedate - 274download Solutions Manual For Intermediate Statistics Using Spss 1St Edition Herschel Knapp 1506377432 9781506377438 Full Chapter PDFDocument36 pagesFiledate - 274download Solutions Manual For Intermediate Statistics Using Spss 1St Edition Herschel Knapp 1506377432 9781506377438 Full Chapter PDFdavid.rex111100% (12)
- Load Chart l160 10dDocument4 pagesLoad Chart l160 10dSandy AgoesNo ratings yet
- Redang Reef Resort Travel & Tours Sdn. Bhd: Daily Itinerary/ 日程Document1 pageRedang Reef Resort Travel & Tours Sdn. Bhd: Daily Itinerary/ 日程Ery JoNo ratings yet
- KPT Internship Report (Ammad Jawed)Document37 pagesKPT Internship Report (Ammad Jawed)Ammad JawedNo ratings yet