You might also like
- Privacy Persuasive EssayDocument3 pagesPrivacy Persuasive Essayapi-251934738No ratings yet
- Case Study ToshibaDocument6 pagesCase Study ToshibaRachelle100% (1)
- Electrical Power and Energy Systems: Vahid Samavatian, Ahmad RadanDocument9 pagesElectrical Power and Energy Systems: Vahid Samavatian, Ahmad RadanariphineNo ratings yet
- HALF BRIDGE Conditioner Final ReportDocument40 pagesHALF BRIDGE Conditioner Final ReportSMARTX BRAINSNo ratings yet
- A Single Stage Common Ground Three-Level PV Inverter With Integrated Power DecouplingDocument11 pagesA Single Stage Common Ground Three-Level PV Inverter With Integrated Power DecouplingroyNo ratings yet
- Implementation of Dual Control MPPT-based DC-DC Converter Fed Solar PV Power ApplicationDocument8 pagesImplementation of Dual Control MPPT-based DC-DC Converter Fed Solar PV Power ApplicationArun raj DharamsuthNo ratings yet
- Two-Stage Three-Phase Transformerless Hybrid Multilevel Inverter For Solar PV ApplicationDocument13 pagesTwo-Stage Three-Phase Transformerless Hybrid Multilevel Inverter For Solar PV ApplicationImanol EliamNo ratings yet
- 2019 - A Bidirectional Home Charging Solution For An EVDocument6 pages2019 - A Bidirectional Home Charging Solution For An EVAndres Arias LondoñoNo ratings yet
- High Power Topology: "AlbacomDocument7 pagesHigh Power Topology: "AlbacomRaveendhra IitrNo ratings yet
- Advanced H-Bridge Controlled Transformer-Less Buck-Boost DC-DC Converter For Fast Charging in Electric VehiclesDocument4 pagesAdvanced H-Bridge Controlled Transformer-Less Buck-Boost DC-DC Converter For Fast Charging in Electric VehiclesRamsathayaNo ratings yet
- The Modular Multilevel Converter For High Step-Up Ratio DC-DC ConversionDocument12 pagesThe Modular Multilevel Converter For High Step-Up Ratio DC-DC ConversionBHARADWAJ CHIVUKULANo ratings yet
- Paper 2002Document12 pagesPaper 2002Miguel VenzNo ratings yet
- Anand2019 Article ADynamicLoadControllerForAStanDocument10 pagesAnand2019 Article ADynamicLoadControllerForAStanMoahmmed AlharbiNo ratings yet
- Bidirectional DC To DC Converters: An Overview of Various Topologies, Switching Schemes and Control TechniquesDocument6 pagesBidirectional DC To DC Converters: An Overview of Various Topologies, Switching Schemes and Control TechniquesVo Thanh TungNo ratings yet
- A High-Efficiency Step-Up Current-Fed PushPull Quasi-Resonant Converter With Fewer Components For Fuel Cell ApplicationDocument10 pagesA High-Efficiency Step-Up Current-Fed PushPull Quasi-Resonant Converter With Fewer Components For Fuel Cell ApplicationManuel DíazNo ratings yet
- A Novel Single Switch High Gain DC-DC ConverterDocument6 pagesA Novel Single Switch High Gain DC-DC ConverterAbhishek MeenaNo ratings yet
- Soft Switched Interleaved DC DC ConverterDocument11 pagesSoft Switched Interleaved DC DC ConverterSatish RamNo ratings yet
- Power Converters, Control, and Energy Management For Distributed GenerationDocument5 pagesPower Converters, Control, and Energy Management For Distributed GenerationAbdelaziz IsmealNo ratings yet
- A Bidirectional High-Power-Quality Grid Interface With A Novel Bidirectional Noninverted Buck-Boost Converter For PhevsDocument15 pagesA Bidirectional High-Power-Quality Grid Interface With A Novel Bidirectional Noninverted Buck-Boost Converter For PhevsPatil MounicareddyNo ratings yet
- A Bidirectional DC-DC Converter Topology For Low Power ApplicationDocument12 pagesA Bidirectional DC-DC Converter Topology For Low Power ApplicationHsekum RamukNo ratings yet
- Single Switch AC DC Cuk Converter For Power Factor and Efficiency EnhancementDocument5 pagesSingle Switch AC DC Cuk Converter For Power Factor and Efficiency EnhancementInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Novel Loaded-Resonant Converter For Application of DC-to-DC Energy ConversionsDocument7 pagesNovel Loaded-Resonant Converter For Application of DC-to-DC Energy ConversionsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design of A Single-Stage Inductive-Power-Transfer Converter For Efficient EV Battery ChargingDocument14 pagesDesign of A Single-Stage Inductive-Power-Transfer Converter For Efficient EV Battery ChargingPaul Mathew 21PHD1086No ratings yet
- Review On Multi Input DC - DC Converter For Renewable Energy ApplicationDocument23 pagesReview On Multi Input DC - DC Converter For Renewable Energy ApplicationAlex VincentNo ratings yet
- Half Bridge Converter For Battery Charging Application: Sivaprasad.A, K.Deepa, K.MathewDocument6 pagesHalf Bridge Converter For Battery Charging Application: Sivaprasad.A, K.Deepa, K.Mathewdavid bennyNo ratings yet
- De Doncker - 1988 - Three-Phase Soft-Switched High Power Density DC - DC Converter For High Power ApplicationsDocument10 pagesDe Doncker - 1988 - Three-Phase Soft-Switched High Power Density DC - DC Converter For High Power ApplicationsashnajosephNo ratings yet
- Loss Analysis of Non-Isolated Bidirectional DC/DC Converters For Hybrid Energy Storage System in EvsDocument7 pagesLoss Analysis of Non-Isolated Bidirectional DC/DC Converters For Hybrid Energy Storage System in EvsManu HPérezNo ratings yet
- DC-DC Bidirectional LLC Resonant Converter For Energy Storage Systems in Distributed GenerationDocument5 pagesDC-DC Bidirectional LLC Resonant Converter For Energy Storage Systems in Distributed GenerationKiran KumarNo ratings yet
- A Buck-Boost Common-Mode Transformerless Inverter For Photovoltaic ApplicationsDocument5 pagesA Buck-Boost Common-Mode Transformerless Inverter For Photovoltaic ApplicationsIndra PratamaNo ratings yet
- A Single-Switch Transformerless DC-DC Converter With Universal Input Voltage For Fuel Cell Vehicles: Analysis and DesignDocument13 pagesA Single-Switch Transformerless DC-DC Converter With Universal Input Voltage For Fuel Cell Vehicles: Analysis and DesignahmedNo ratings yet
- Review of Power Factor Correction (PFC) AC/DC-DC Power Electronic Converters For Electric Vehicle ApplicationsDocument31 pagesReview of Power Factor Correction (PFC) AC/DC-DC Power Electronic Converters For Electric Vehicle ApplicationsIndra GandhiNo ratings yet
- An Isolated Series Resonant Converter For PV Application: Manalan108@gmailcomDocument4 pagesAn Isolated Series Resonant Converter For PV Application: Manalan108@gmailcomRaja SajinNo ratings yet
- International Journal of Electrical Power and Energy SystemsDocument19 pagesInternational Journal of Electrical Power and Energy Systemsgürcan EserNo ratings yet
- The Reduction of Total Harmonic Distortion For The Multilevel Converter Using Genetic Algorithms Optimization MethodDocument15 pagesThe Reduction of Total Harmonic Distortion For The Multilevel Converter Using Genetic Algorithms Optimization MethodMohammad reza eesazadehNo ratings yet
- High-Conversion-Ratio Isolated Bidirectional DCDC Converter For Distributed Energy Storage SystemsDocument22 pagesHigh-Conversion-Ratio Isolated Bidirectional DCDC Converter For Distributed Energy Storage SystemsHsekum Ramuk100% (1)
- How Much Is The Standard DC Voltage of Eclectic Vehicle? Main Components Used in EV What Is The Difference Between V2G and G2V? What Does AFE Converters Are?Document8 pagesHow Much Is The Standard DC Voltage of Eclectic Vehicle? Main Components Used in EV What Is The Difference Between V2G and G2V? What Does AFE Converters Are?AdisuNo ratings yet
- Electronics 08 00774Document15 pagesElectronics 08 00774Bruno HernandezNo ratings yet
- Optimal Design of The Power Transformer With ANSYS Maxwell For Bidirectional Battery ChargerDocument9 pagesOptimal Design of The Power Transformer With ANSYS Maxwell For Bidirectional Battery ChargerlordgtyNo ratings yet
- State-Space Modelling of LLC Resonant Half-BridgeDocument10 pagesState-Space Modelling of LLC Resonant Half-BridgeSung Ryoung LimNo ratings yet
- Multiport DC-DC Converters For Renewable Energy: An Overview With ContributionsDocument22 pagesMultiport DC-DC Converters For Renewable Energy: An Overview With ContributionsRa muNo ratings yet
- Journal ScientificDocument5 pagesJournal Scientificrikaseo rikaNo ratings yet
- Inverter Distributed: Controller Generation SystemsDocument7 pagesInverter Distributed: Controller Generation SystemsJohnNo ratings yet
- Comparison of Various Converter Topologies For HEV ApplicationsDocument2 pagesComparison of Various Converter Topologies For HEV ApplicationsJyothi VenuNo ratings yet
- Energies 14 02650 With CoverDocument20 pagesEnergies 14 02650 With CoverannaNo ratings yet
- 1 Vasantharajan 2023Document16 pages1 Vasantharajan 2023tadivadavamsiNo ratings yet
- A Literature Review On High Gain DC-DC Boost ConverterDocument8 pagesA Literature Review On High Gain DC-DC Boost ConverterVidvek InfoTechNo ratings yet
- Ijet V2i2p17Document9 pagesIjet V2i2p17International Journal of Engineering and TechniquesNo ratings yet
- Bridgeless AC-DC Buck-Boost Converter WithDocument5 pagesBridgeless AC-DC Buck-Boost Converter WithJishnu VenugopalNo ratings yet
- Journal of Power Sources: Slah Farhani, Abdul N'Diaye, Abdeslem Djerdir, Faouzi BachaDocument11 pagesJournal of Power Sources: Slah Farhani, Abdul N'Diaye, Abdeslem Djerdir, Faouzi BachaariphineNo ratings yet
- Bridgetopology 72 400Document8 pagesBridgetopology 72 400sravaniNo ratings yet
- Active Power and DC Voltage Coordinative Control For Cascaded DC-AC Converter With Bidirectional Power ApplicationDocument15 pagesActive Power and DC Voltage Coordinative Control For Cascaded DC-AC Converter With Bidirectional Power Applicationragnar blackNo ratings yet
- Final Report PFCDocument65 pagesFinal Report PFCMano HaranNo ratings yet
- Paper 5 PDFDocument6 pagesPaper 5 PDFrhusheinNo ratings yet
- An Introduction To Sepic ConverterDocument2 pagesAn Introduction To Sepic Converterleemoh8190No ratings yet
- Research ArticleDocument11 pagesResearch ArticleDung NguyenNo ratings yet
- 1992 - Performance Characterization of A High-Power Dual Active Bridge DC-To-DC Converter - KheraluwalaDocument8 pages1992 - Performance Characterization of A High-Power Dual Active Bridge DC-To-DC Converter - Kheraluwalahafizabu123No ratings yet
- A Three-Level Resonant DAB Converter Featuring Minimised Circulating Losses For EV Battery ChargingDocument10 pagesA Three-Level Resonant DAB Converter Featuring Minimised Circulating Losses For EV Battery ChargingHarshaNo ratings yet
- Large Step Ratio Input-Series-Output-Parallel Chain-Link DC-DC ConverterDocument12 pagesLarge Step Ratio Input-Series-Output-Parallel Chain-Link DC-DC ConverterArunavaNo ratings yet
- A Multifunction Control Strategy For The Stable Operation of DG Units in Smart GridsDocument10 pagesA Multifunction Control Strategy For The Stable Operation of DG Units in Smart Gridsnimishbhatt1607No ratings yet
- Current Source Inverter Based Cascaded Solid State Transformer For AC To DC Power ConversionDocument5 pagesCurrent Source Inverter Based Cascaded Solid State Transformer For AC To DC Power ConversionCamila MurilloNo ratings yet
- Novel Isolated Bidirectional Interleaved ConverterDocument10 pagesNovel Isolated Bidirectional Interleaved ConverterHsekum RamukNo ratings yet
- 21 Multi-Level Inverters Based On Cascaded H-BridgDocument33 pages21 Multi-Level Inverters Based On Cascaded H-BridgannaNo ratings yet
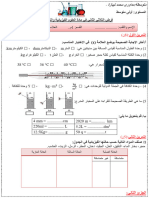
- Dzexams 1am Physique 557318Document5 pagesDzexams 1am Physique 557318annaNo ratings yet
- State of Charge Estimation For BatteriesDocument89 pagesState of Charge Estimation For BatteriesannaNo ratings yet
- IET Energy Syst Integration - 2021 - Kumar - Battery Charging Topology Infrastructure and Standards For Electric VehicleDocument17 pagesIET Energy Syst Integration - 2021 - Kumar - Battery Charging Topology Infrastructure and Standards For Electric VehicleannaNo ratings yet
- Applsci 10 01009 v2Document21 pagesApplsci 10 01009 v2annaNo ratings yet
- Lei 2019 J. Phys. Conf. Ser. 1325 012173Document7 pagesLei 2019 J. Phys. Conf. Ser. 1325 012173annaNo ratings yet
- Battery Open-Circuit Voltage Estimation by A Method of Statistical AnalysisDocument4 pagesBattery Open-Circuit Voltage Estimation by A Method of Statistical AnalysisannaNo ratings yet
- Open Circuit Voltage Comes From Non Equilibrium ThermodynamicsDocument18 pagesOpen Circuit Voltage Comes From Non Equilibrium ThermodynamicsannaNo ratings yet
- PID4301545Document7 pagesPID4301545annaNo ratings yet
- Optimally Designed DC-DCDocument33 pagesOptimally Designed DC-DCannaNo ratings yet
- Amirkafi 2018Document6 pagesAmirkafi 2018annaNo ratings yet
- Kahia 2015Document4 pagesKahia 2015annaNo ratings yet
- FinalPaperDesign and Simulation of PID Controller For Power Electronics Converter Circuits170541Document6 pagesFinalPaperDesign and Simulation of PID Controller For Power Electronics Converter Circuits170541annaNo ratings yet
- Bidirectional DC/DC Power Converter For Hybrid Yacht Propulsion SystemDocument10 pagesBidirectional DC/DC Power Converter For Hybrid Yacht Propulsion SystemannaNo ratings yet
- PPEECS Sample FileDocument3 pagesPPEECS Sample FileannaNo ratings yet
- A General Unified Approach To Modelling Switching Dc-To-Dc Converters in Discontinuous Conduction ModeDocument22 pagesA General Unified Approach To Modelling Switching Dc-To-Dc Converters in Discontinuous Conduction ModeannaNo ratings yet
- Adaptive Artificial Neural Network Based Models For Instantaneous Power Estimation Enhancement in Electric Vehicles' Li-Ion BatteriesDocument10 pagesAdaptive Artificial Neural Network Based Models For Instantaneous Power Estimation Enhancement in Electric Vehicles' Li-Ion BatteriesannaNo ratings yet
- Data-Driven Health Estimation and Lifetime Prediction of Lithium-Ion Batteries: A ReviewDocument61 pagesData-Driven Health Estimation and Lifetime Prediction of Lithium-Ion Batteries: A ReviewannaNo ratings yet
- The BesDocument10 pagesThe BesannaNo ratings yet
- Buku Gitar 1Document29 pagesBuku Gitar 1R Heru Suseno PusponegoroNo ratings yet
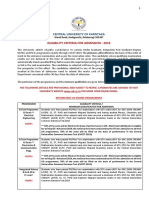
- Eligibility CriteriaDocument13 pagesEligibility CriteriaArnab SahaNo ratings yet
- Assignment 1Document14 pagesAssignment 1Birhaneselasie AbebeNo ratings yet
- WORKSHEETS With RUBRICSDocument5 pagesWORKSHEETS With RUBRICSMichael MalvarNo ratings yet
- Tax Haven - OdtDocument2 pagesTax Haven - OdtMarian PîrjolNo ratings yet
- Imperfections in Atomic ArrangementsDocument23 pagesImperfections in Atomic ArrangementsDave Harrison FloresNo ratings yet
- Shadowlands Study GuideDocument8 pagesShadowlands Study GuideAnna ButnaruNo ratings yet
- Small Scale Industries in IndiaDocument12 pagesSmall Scale Industries in IndiaSangram AsabeNo ratings yet
- Galvashield XPDocument2 pagesGalvashield XPMansoor AliNo ratings yet
- Computer Programming & Problem Solving (CPPS-I) : Chapter # 3Document18 pagesComputer Programming & Problem Solving (CPPS-I) : Chapter # 3Muzammil AhmadNo ratings yet
- JMG Kaeser Rotary Screw CompressorsDocument19 pagesJMG Kaeser Rotary Screw CompressorsFaycel AMAYRANo ratings yet
- Green Hydrogen Production RoutesDocument6 pagesGreen Hydrogen Production RoutesmerlinakisNo ratings yet
- Factors Determining Term Deposit Purchases: How A Bank Can Get Other People's MoneyDocument59 pagesFactors Determining Term Deposit Purchases: How A Bank Can Get Other People's MoneyebeNo ratings yet
- I Love My Family by Elizabeth AbrahamDocument65 pagesI Love My Family by Elizabeth Abrahamelizabeth abrahamNo ratings yet
- Mock Exam 2Document12 pagesMock Exam 2Lupao Nueva EcijaNo ratings yet
- Ref.: SC/1017155/GGN/CRMIO/2019 Date: 08-Feb-2019: This Is A System Generated Letter and Does Not Require Any SignaturesDocument2 pagesRef.: SC/1017155/GGN/CRMIO/2019 Date: 08-Feb-2019: This Is A System Generated Letter and Does Not Require Any Signaturesgajala jamirNo ratings yet
- Histology - Nerve Tissue and The Nervous SystemDocument21 pagesHistology - Nerve Tissue and The Nervous SystemDan UvarovNo ratings yet
- Price Discrimination Under Monopoly: Types, Degrees and Other DetailsDocument18 pagesPrice Discrimination Under Monopoly: Types, Degrees and Other DetailsSanchit BabbarNo ratings yet
- General Specification: B. Plans and SpecificationsDocument5 pagesGeneral Specification: B. Plans and Specificationsmichael nabusNo ratings yet
- 4C06 LeThiThuHien Proverbs and Idioms Related To Animals in English and VietnameseDocument19 pages4C06 LeThiThuHien Proverbs and Idioms Related To Animals in English and VietnameseStefaniaNo ratings yet
- Travel BlogsDocument14 pagesTravel BlogsEliasNo ratings yet
- Angle Modulation (Part 2)Document7 pagesAngle Modulation (Part 2)Ryan Anthony AndalNo ratings yet
- Bài tập Vocabulary 11-12Document7 pagesBài tập Vocabulary 11-12Vy Tran Thi TuongNo ratings yet
- Globalisation and Changing Practices For Academic Librarians in Australia A Literature ReviewDocument19 pagesGlobalisation and Changing Practices For Academic Librarians in Australia A Literature ReviewDana Michele Rivera CastroNo ratings yet
- Smart PlantDocument385 pagesSmart Plantr100% (1)
- Aco TD DWG BasementDocument73 pagesAco TD DWG Basementloc khaNo ratings yet
- Chapter 6 - Potential Sweep MethodsDocument14 pagesChapter 6 - Potential Sweep Methodsfireworks_47No ratings yet
- 10 - TCP IP ModelDocument6 pages10 - TCP IP ModelAbdourahmane BaNo ratings yet