You might also like
- Low Temperatures and Electric Power: Transmission Motors, Transformers and Other Equipment Cryogenics and Properties of MaterialsFrom EverandLow Temperatures and Electric Power: Transmission Motors, Transformers and Other Equipment Cryogenics and Properties of MaterialsNo ratings yet
- United States Patent: Karaoguz Et Al. (45) Date of Patent: Apr. 2, 2013Document45 pagesUnited States Patent: Karaoguz Et Al. (45) Date of Patent: Apr. 2, 2013charitablegrinderNo ratings yet
- US8129976Document31 pagesUS8129976ErockNo ratings yet
- United States Patent: (12) (10) Patent No.: US 7,697.253 B1Document29 pagesUnited States Patent: (12) (10) Patent No.: US 7,697.253 B1Andi KaNo ratings yet
- Shockproof Device and Method PatentsDocument16 pagesShockproof Device and Method PatentsGopi RamuNo ratings yet
- Us 6169433Document10 pagesUs 6169433Emer nelsonNo ratings yet
- ABB Patent TRAVELING WAVE BASED FAULT LOCATION USING UNSYNCHRONIZED MEASUREMENTS FOR TRANSMISSION LINES US11204382Document15 pagesABB Patent TRAVELING WAVE BASED FAULT LOCATION USING UNSYNCHRONIZED MEASUREMENTS FOR TRANSMISSION LINES US11204382Jesús CastellanosNo ratings yet
- US8977365Document37 pagesUS8977365Anonymous GIIncAfLRNo ratings yet
- Us7745962 PDFDocument19 pagesUs7745962 PDFAb Imō PectoreNo ratings yet
- United States Patent (10) Patent No.: US 6,238,333 B1: L00S (45) Date of Patent: May 29, 2001Document9 pagesUnited States Patent (10) Patent No.: US 6,238,333 B1: L00S (45) Date of Patent: May 29, 2001danielgoba84No ratings yet
- Multi-Winding Homopolar Electric MachineDocument12 pagesMulti-Winding Homopolar Electric Machinejegz booksNo ratings yet
- System and Method For Powering A Hydraulic PumpDocument21 pagesSystem and Method For Powering A Hydraulic PumpAhmad luthfi asrorNo ratings yet
- Us 6323809Document40 pagesUs 6323809Dr Sameer Chakravarthy VVSSNo ratings yet
- United States Patent (10) Patent No.: US 9,178.423 B2Document11 pagesUnited States Patent (10) Patent No.: US 9,178.423 B2Nihar RoyNo ratings yet
- Contactless Electrical Energy Transmission SystemDocument14 pagesContactless Electrical Energy Transmission SystemUzhansEell-neinoNo ratings yet
- United States Patent: (10) Patent No.: US 8,629,637 B2Document13 pagesUnited States Patent: (10) Patent No.: US 8,629,637 B2AhmedNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument9 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentThusith WijayawardenaNo ratings yet
- US6508119Document8 pagesUS6508119aydaergenNo ratings yet
- Method and System for Managing Temperature in a Speed ControllerDocument9 pagesMethod and System for Managing Temperature in a Speed ControllernidhalNo ratings yet
- Fault Detection in Relay Drive Circuits for Process Control SystemsDocument14 pagesFault Detection in Relay Drive Circuits for Process Control SystemsAlexander Pozo Rosero DHNo ratings yet
- US6477932Document5 pagesUS6477932Gavin SoccorsoNo ratings yet
- Electric Vehicle Fault DetectionDocument20 pagesElectric Vehicle Fault DetectionAnurag MishraNo ratings yet
- US10847870Document19 pagesUS10847870Rifaqat HussainNo ratings yet
- US9197965Document50 pagesUS9197965Morena SlpNo ratings yet
- Us8801359 PDFDocument49 pagesUs8801359 PDFfermeskopNo ratings yet
- Demagnetization Fault Prevention - Using Current Controll Through Inverter - US10230321B1Document10 pagesDemagnetization Fault Prevention - Using Current Controll Through Inverter - US10230321B1Krishna KumarNo ratings yet
- Sal-/? 4 st-12-ss: (12) United States Patent (10) Patent No.: US 6, 191587 B1Document14 pagesSal-/? 4 st-12-ss: (12) United States Patent (10) Patent No.: US 6, 191587 B1雷鸣No ratings yet
- Us 10342980Document16 pagesUs 10342980Jagriti AroraNo ratings yet
- US Patent for Acoustic Doppler Velocity ProcessingDocument31 pagesUS Patent for Acoustic Doppler Velocity ProcessingDaniel magallanesNo ratings yet
- Horizontal Directional Drilling Machine Tracking SystemDocument57 pagesHorizontal Directional Drilling Machine Tracking SystemCường Nguyễn QuốcNo ratings yet
- United States Patent (10) Patent No.: US 7.498,769 B1Document25 pagesUnited States Patent (10) Patent No.: US 7.498,769 B1charitablegrinderNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument10 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentResurge meditationNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument7 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentAnonymous GIIncAfLRNo ratings yet
- Us7224077 PDFDocument6 pagesUs7224077 PDFMladen MuskinjaNo ratings yet
- Patente IlluminetDocument11 pagesPatente IlluminetAmanda Forero HernándezNo ratings yet
- SEL Patent TIME-DOMAIN DIRECTIONAL LINE PROTECTION OF ELECTRIC POWER DELIVERY SYSTEMS US20170082675A1Document29 pagesSEL Patent TIME-DOMAIN DIRECTIONAL LINE PROTECTION OF ELECTRIC POWER DELIVERY SYSTEMS US20170082675A1Jesús CastellanosNo ratings yet
- Supply Line ?: United States Patent (19) 11 Patent Number: 5,835,319Document7 pagesSupply Line ?: United States Patent (19) 11 Patent Number: 5,835,319Sanjiv SharanNo ratings yet
- WWWWWWWWWWW: (12) United States PatentDocument36 pagesWWWWWWWWWWW: (12) United States PatentRoberto AbregoNo ratings yet
- Patent for short circuit protection in switching power suppliesDocument12 pagesPatent for short circuit protection in switching power suppliesKenneth WymanNo ratings yet
- United States Patent (19) : WeberDocument12 pagesUnited States Patent (19) : Weberaless2056No ratings yet
- US6335673Document9 pagesUS6335673Maulana HidayatullahNo ratings yet
- US6585061B2Document8 pagesUS6585061B2ginni koundalNo ratings yet
- United States Patent (10) Patent No.: US 7.460,350 B2: Talbot Et Al. (45) Date of Patent: Dec. 2, 2008Document27 pagesUnited States Patent (10) Patent No.: US 7.460,350 B2: Talbot Et Al. (45) Date of Patent: Dec. 2, 2008Vansala GanesanNo ratings yet
- Prototipo CircuitDocument8 pagesPrototipo CircuitEmer nelsonNo ratings yet
- System Converts High Frequency EMF to Electrical EnergyDocument15 pagesSystem Converts High Frequency EMF to Electrical EnergyFabrice BresilNo ratings yet
- United States Patent: FletcherDocument8 pagesUnited States Patent: FletcherChristian MarquezNo ratings yet
- Quantum Vacuum Energy ExtractionDocument21 pagesQuantum Vacuum Energy ExtractionPabloHongoNo ratings yet
- United States Patent (10) Patent No.: US 6,281,595 B1Document8 pagesUnited States Patent (10) Patent No.: US 6,281,595 B1PaoloPorrasArrietaNo ratings yet
- United States Patent (19) : 11) Patent Number: 4,864,547 (45) Date of Patent: Sep. 5, 1989Document18 pagesUnited States Patent (19) : 11) Patent Number: 4,864,547 (45) Date of Patent: Sep. 5, 1989mohasNo ratings yet
- Power Supply Controls Frequency and Voltage for Corona Discharge TreatmentDocument11 pagesPower Supply Controls Frequency and Voltage for Corona Discharge Treatmentaless2056No ratings yet
- United States Patent (10) Patent No.: US 8,044,604 B2Document17 pagesUnited States Patent (10) Patent No.: US 8,044,604 B2Taufiq AhmadNo ratings yet
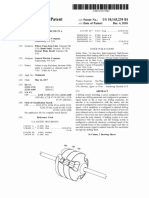
- Us 10145239Document8 pagesUs 10145239MasoudNo ratings yet
- Solid State Electric Generator Uses Magnetic FluxDocument9 pagesSolid State Electric Generator Uses Magnetic FluxDan Beeson100% (2)
- Guided Wave Radar Level Transmitter DesignDocument16 pagesGuided Wave Radar Level Transmitter DesignEdda Andrade RosalesNo ratings yet
- US3610971 Hooper Electric Field Non MechanicalDocument6 pagesUS3610971 Hooper Electric Field Non MechanicalourbobbyNo ratings yet
- Patente CharguerDocument12 pagesPatente CharguerAlejandro FernandezNo ratings yet
- United States Patent: A61B 18118 A61B 1811815 (2013.01) A61B 18102 (2013.01)Document177 pagesUnited States Patent: A61B 18118 A61B 1811815 (2013.01) A61B 18102 (2013.01)StephenNo ratings yet
- X-Ray Stator Control BoardDocument10 pagesX-Ray Stator Control BoardSohail AhmedNo ratings yet
- United States Patent: Matsushita Et AlDocument25 pagesUnited States Patent: Matsushita Et AlEl Kanouani ZakariaNo ratings yet
- United States Patent (19) 11 Patent Number: 5,872,406: Ullman Et Al. (45) Date of Patent: Feb. 16, 1999Document13 pagesUnited States Patent (19) 11 Patent Number: 5,872,406: Ullman Et Al. (45) Date of Patent: Feb. 16, 1999Marlon MataNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 209Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 209Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 211Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 211Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 215Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 215Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 216Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 216Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 213Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 213Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 21Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 21Andi KaNo ratings yet
- Pump device upperstructure installationDocument1 pagePump device upperstructure installationAndi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 206Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 206Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 212Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 212Andi KaNo ratings yet
- Install 2nd stage carrier assemblyDocument1 pageInstall 2nd stage carrier assemblyAndi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 125Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 125Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 207Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 207Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 123Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 123Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 127Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 127Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 12Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 12Andi KaNo ratings yet
- Pump Device Upperstructure RemovalDocument1 pagePump Device Upperstructure RemovalAndi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 111Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 111Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 121Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 121Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 115Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 115Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 16Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 16Andi KaNo ratings yet
- Pump Device Upperstructure RemovalDocument1 pagePump Device Upperstructure RemovalAndi KaNo ratings yet
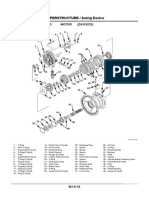
- UNDERCARRIAGE / Travel Device: of Roller Bearing (30) On The Motor Side, So Don't Remove ItDocument1 pageUNDERCARRIAGE / Travel Device: of Roller Bearing (30) On The Motor Side, So Don't Remove ItAndi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 110Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 110Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 11Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 11Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 105Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 105Andi KaNo ratings yet
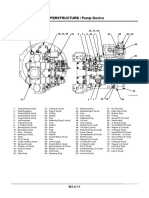
- UPPERSTRUCTURE / Pump Device Parts ListDocument1 pageUPPERSTRUCTURE / Pump Device Parts ListAndi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 112Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 112Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 109Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 109Andi Ka100% (1)
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 106Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 106Andi KaNo ratings yet
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 104Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 104Andi KaNo ratings yet
- Power Electronics Devices LectureDocument19 pagesPower Electronics Devices Lecturehabte gebreial shrashrNo ratings yet
- SKKQ 800Document2 pagesSKKQ 800hendrixx123No ratings yet
- GEJC Quiz on Islamic Studies, Current Affairs, Pak Studies and Electrical EngineeringDocument10 pagesGEJC Quiz on Islamic Studies, Current Affairs, Pak Studies and Electrical EngineeringRoman Ali0% (1)
- Siemens - Basics of DC DrivesDocument85 pagesSiemens - Basics of DC DrivesMuhammad Bilal HussainNo ratings yet
- HVDC Transmission Overview: M. P. Bahrman, P.E., Member, IEEEDocument7 pagesHVDC Transmission Overview: M. P. Bahrman, P.E., Member, IEEEAHMED YOUSEFNo ratings yet
- Silicon Controlled RectifierDocument8 pagesSilicon Controlled RectifierTrisha Camille NerieNo ratings yet
- IEEE Power System Paper-Analysis and Implement of Thyristor-Based STATCOMDocument5 pagesIEEE Power System Paper-Analysis and Implement of Thyristor-Based STATCOMAnoop MathewNo ratings yet
- Pakistan General Knowledge MCQs Dogar Publishers PDF GuideDocument65 pagesPakistan General Knowledge MCQs Dogar Publishers PDF GuideFarooq HassanNo ratings yet
- Final Earthing V3Document22 pagesFinal Earthing V3RewanEsamNo ratings yet
- Semikron SKKT 330Document5 pagesSemikron SKKT 330shubham kulshreshthaNo ratings yet
- Transistor InfoDocument3 pagesTransistor InfoErantha SampathNo ratings yet
- Dynacomp: The Top-Class Reactive Power CompensatorDocument8 pagesDynacomp: The Top-Class Reactive Power CompensatorJOSE DANIEL PEREZNo ratings yet
- Power Electronics 1-2015bjrDocument80 pagesPower Electronics 1-2015bjrNurAdiFirawanNo ratings yet
- Industrial Power Electronics PDFDocument88 pagesIndustrial Power Electronics PDFsanthoshramrNo ratings yet
- Electric Drives Lab Experiments MATLAB Simulation Netaji Subhas UniversityDocument43 pagesElectric Drives Lab Experiments MATLAB Simulation Netaji Subhas UniversityDigital AlarmNo ratings yet
- RWTH Aachen Student Lab Guide on Power Electronics ComponentsDocument55 pagesRWTH Aachen Student Lab Guide on Power Electronics ComponentsRashidul HasanNo ratings yet
- Surface Mount - 200V-600W 2N6071A/B SeriesDocument8 pagesSurface Mount - 200V-600W 2N6071A/B SeriesFaulhaber AdrianNo ratings yet
- CH 4 Objectives of Series and Shunt CompensationDocument51 pagesCH 4 Objectives of Series and Shunt CompensationclydeNo ratings yet
- 1 Phase Controlled RectifierDocument34 pages1 Phase Controlled RectifierAfiq BobbyNo ratings yet
- M.SC - in Electrical and Comp Control EngDocument36 pagesM.SC - in Electrical and Comp Control EngIslam FattouhNo ratings yet
- 16MT12301 - ApsdDocument11 pages16MT12301 - ApsdNmg KumarNo ratings yet
- Mechatronics Electronic Control Systems in Mechanical and Electrical Engineering 6th Edition Bolton Solutions ManualDocument9 pagesMechatronics Electronic Control Systems in Mechanical and Electrical Engineering 6th Edition Bolton Solutions ManualRagavanNo ratings yet
- CSQ-3 Data Sheet 4921240263 UKDocument5 pagesCSQ-3 Data Sheet 4921240263 UKDario GuzmanNo ratings yet
- Triggering CircuitDocument26 pagesTriggering CircuitJustin Jose PNo ratings yet
- Catalog of ELC For Micro Hydro PowerDocument9 pagesCatalog of ELC For Micro Hydro PowerSufi Shah Hamid JalaliNo ratings yet
- SCR / Thyristor: - Circuit Symbol and Terminal IdentificationDocument13 pagesSCR / Thyristor: - Circuit Symbol and Terminal IdentificationlubnaNo ratings yet
- Understanding the Operation and Characteristics of Silicon Controlled Rectifiers (SCRsDocument15 pagesUnderstanding the Operation and Characteristics of Silicon Controlled Rectifiers (SCRsAndrew FongNo ratings yet
- Industrial Elecs Lecture PDFDocument94 pagesIndustrial Elecs Lecture PDFJaneNo ratings yet
- Manual Soft Starter PSD370 5309699-1Document22 pagesManual Soft Starter PSD370 5309699-1Marcos AldrovandiNo ratings yet
- 3BHS212794 ZAB E01 H 6k W STD UMDocument266 pages3BHS212794 ZAB E01 H 6k W STD UMJenry Martinez CalzadaNo ratings yet
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- Power Quality in Power Systems and Electrical MachinesFrom EverandPower Quality in Power Systems and Electrical MachinesRating: 4.5 out of 5 stars4.5/5 (11)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsFrom EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsRating: 5 out of 5 stars5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)