You might also like
- Pre-Calculus - Unit CircleDocument27 pagesPre-Calculus - Unit CircleKarl OliverosNo ratings yet
- ENO SysteENO and WENO Schemes For Hyperbolic Conservation LawsDocument41 pagesENO SysteENO and WENO Schemes For Hyperbolic Conservation LawsTamadur BarghoothiNo ratings yet
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- Group Theory and PhysicsDocument9 pagesGroup Theory and PhysicsMaxNo ratings yet
- Solution Exercises 2011 PartIDocument27 pagesSolution Exercises 2011 PartIcecch001100% (1)
- Chapter 3 Solution.. KreyszigDocument78 pagesChapter 3 Solution.. KreyszigBladimir BlancoNo ratings yet
- In Class Homework CH 2Document4 pagesIn Class Homework CH 2Tiago Matos100% (1)
- MHT Cet Triumph Maths Mcqs Based On STD Xi Xii Syllabus MH Board Hints 12750 PDFDocument699 pagesMHT Cet Triumph Maths Mcqs Based On STD Xi Xii Syllabus MH Board Hints 12750 PDFvipul deshmukh100% (3)
- 6inner Product Spaces 2020Document89 pages6inner Product Spaces 2020Bảo Tín TrầnNo ratings yet
- KG EuclideDocument89 pagesKG EuclidePhương Lâm MỹNo ratings yet
- KG EuclideDocument41 pagesKG Euclideshile9011No ratings yet
- EUCLIDEANDocument68 pagesEUCLIDEANTuấn Khang TừNo ratings yet
- Math 225.review IIIDocument2 pagesMath 225.review IIIcilekalerjisiNo ratings yet
- I Problemas2Document2 pagesI Problemas2holaNo ratings yet
- Questions Section 4, OptimisationDocument20 pagesQuestions Section 4, Optimisationagonza70No ratings yet
- Linear Algebra Demystified Ch6Document15 pagesLinear Algebra Demystified Ch6Rajib BaruaNo ratings yet
- Linear Algebra Inner ProductDocument3 pagesLinear Algebra Inner ProductkamleshNo ratings yet
- Examples Done On Orthogonal ProjectionDocument79 pagesExamples Done On Orthogonal ProjectionAbraham JyothimonNo ratings yet
- Problem Set 5Document2 pagesProblem Set 5Anushka VijayNo ratings yet
- MTL101-Tutorial Sheet 3Document2 pagesMTL101-Tutorial Sheet 3Mohammad AnsarNo ratings yet
- MA 111 Endsem@Part-ADocument1 pageMA 111 Endsem@Part-AVishal SinghNo ratings yet
- Math201 - WK13 - Sec 6.7, 6.8Document18 pagesMath201 - WK13 - Sec 6.7, 6.8Ramy El-HadadNo ratings yet
- HW15 Diffrentiabilty and Misc.Document3 pagesHW15 Diffrentiabilty and Misc.annu diwediNo ratings yet
- (Rosenberger, 1997) - Functional Analysis Introduction To Spectral Theory in Hilbert SpacesDocument62 pages(Rosenberger, 1997) - Functional Analysis Introduction To Spectral Theory in Hilbert SpacesclearcastingNo ratings yet
- Lagrange MultipliersDocument16 pagesLagrange MultipliersShubham TejuNo ratings yet
- 2 Increasing & Decresing FunctionsDocument4 pages2 Increasing & Decresing FunctionsShivam LalNo ratings yet
- Linear TransformationDocument114 pagesLinear TransformationHIỂN ĐỖ MINHNo ratings yet
- FunctionsDocument9 pagesFunctions叶蕊雅No ratings yet
- Mech2407: Multivariable Calculus & Partial Differential EquationsDocument8 pagesMech2407: Multivariable Calculus & Partial Differential EquationsLouis BrightonNo ratings yet
- Tutorial Sheet No. 5: 1 2 N N I IDocument1 pageTutorial Sheet No. 5: 1 2 N N I IKishan PatelNo ratings yet
- Assignment 4Document1 pageAssignment 4meenakshisravaniNo ratings yet
- FA Chap4 1-4 PDFDocument4 pagesFA Chap4 1-4 PDFJuan Carlos Moreno OrtizNo ratings yet
- 1.1 Review of Sections 1.2.1-1.2.2 - Elastic Bar: Compare With The 1-D CaseDocument3 pages1.1 Review of Sections 1.2.1-1.2.2 - Elastic Bar: Compare With The 1-D Casejulianli0220No ratings yet
- Assignment 2 SQQM1023 A111Document3 pagesAssignment 2 SQQM1023 A111Syuhada RosliNo ratings yet
- Exercise Sheet 1: ExercisesDocument2 pagesExercise Sheet 1: ExercisesMuhammad Nabeel NumanNo ratings yet
- Excercises Calculus of Several VariablesDocument4 pagesExcercises Calculus of Several VariablesTrần HùngNo ratings yet
- BMTC-132 Assignment 2019-20 (English) PDFDocument6 pagesBMTC-132 Assignment 2019-20 (English) PDFRajput Neeraj SinghNo ratings yet
- Tutorial CalculusDocument2 pagesTutorial CalculusphilibethenockNo ratings yet
- HLP Gyt39smDocument5 pagesHLP Gyt39smMrinmay Dev SarmaNo ratings yet
- HLP GYt39SMDocument5 pagesHLP GYt39SMSreyas KothaNo ratings yet
- Theory / Summary Session - 2015-16 New Sheet Structure For JEE (Advanced) Class - XIIDocument61 pagesTheory / Summary Session - 2015-16 New Sheet Structure For JEE (Advanced) Class - XIIPuneet JainNo ratings yet
- Midterm 2009 PostDocument3 pagesMidterm 2009 PostNey NattarinNo ratings yet
- Composite FunctionsDocument4 pagesComposite FunctionsArpit JainNo ratings yet
- Solutions To Home Work Test/Mathematics: Functions HWT - 1Document7 pagesSolutions To Home Work Test/Mathematics: Functions HWT - 1varunkohliinNo ratings yet
- Problem Collection PDFDocument40 pagesProblem Collection PDFDIEGO MARTIN MAESONo ratings yet
- Rhotrix Topological SpaceDocument8 pagesRhotrix Topological SpacerjkmrkanwarNo ratings yet
- Problem Set 3Document4 pagesProblem Set 3Janet San Jose Dar-JuanNo ratings yet
- 025b31babd5dd-Basic Mathematics Target PackageDocument80 pages025b31babd5dd-Basic Mathematics Target Packagepallavivermabt21No ratings yet
- C-6 Worksheet C Class Xii (H) (2021-22)Document4 pagesC-6 Worksheet C Class Xii (H) (2021-22)Faster RapperNo ratings yet
- Assignment 2Document2 pagesAssignment 2Sahilpreet 5inghNo ratings yet
- Chapter 1: Partial Differentiation: F For These FunctionDocument5 pagesChapter 1: Partial Differentiation: F For These Functionainafiqaa17No ratings yet
- Review Exercise Set 8: X CX XDocument6 pagesReview Exercise Set 8: X CX XGaurav rajNo ratings yet
- Nat Reviewer 2022 2023Document13 pagesNat Reviewer 2022 2023Mikee Fernandez TangubNo ratings yet
- Chapter 2 - Introduction To Logic CircuitsDocument80 pagesChapter 2 - Introduction To Logic CircuitsKarimovaRaikhanovnaNo ratings yet
- Tutorial 5 - Derivative of Multivariable FunctionsDocument2 pagesTutorial 5 - Derivative of Multivariable FunctionsИбрагим Ибрагимов0% (1)
- XemP 09H CalBusi 212 Several EDocument17 pagesXemP 09H CalBusi 212 Several EHuỳnh Lê Việt HóaNo ratings yet
- Lecture 10-11Document10 pagesLecture 10-11alfalfa manNo ratings yet
- Bachelor'S Degree Programme (BDP) Term-End Examination June, 2017Document4 pagesBachelor'S Degree Programme (BDP) Term-End Examination June, 2017Sumit SharmaNo ratings yet
- Math 208 Euclidean Geometry BNEWDocument7 pagesMath 208 Euclidean Geometry BNEWKrypto HeartfiliaNo ratings yet
- Ec3352 LNDocument336 pagesEc3352 LNThahsin ThahirNo ratings yet
- Ecn 2311 Tutorial Sheet 2 (2021)Document2 pagesEcn 2311 Tutorial Sheet 2 (2021)Mirriam MuchelwanaNo ratings yet
- Chapter 6: Fourier Series: DX Xe DX e XDocument13 pagesChapter 6: Fourier Series: DX Xe DX e XDIey ChokiEyNo ratings yet
- Chapter 06Document55 pagesChapter 06Bảo Tín TrầnNo ratings yet
- Chapter 03Document72 pagesChapter 03Bảo Tín TrầnNo ratings yet
- Topic 3bDocument20 pagesTopic 3bBảo Tín TrầnNo ratings yet
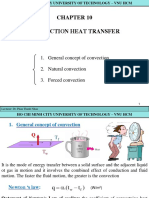
- Chapter 10 - General Concepts of Convection - Natural and Forced ConvectionDocument33 pagesChapter 10 - General Concepts of Convection - Natural and Forced ConvectionBảo Tín TrầnNo ratings yet
- Topic 1Document10 pagesTopic 1Bảo Tín TrầnNo ratings yet
- Chapter 12 - Heat ExchangerDocument21 pagesChapter 12 - Heat ExchangerBảo Tín TrầnNo ratings yet
- Chapter 05Document41 pagesChapter 05Bảo Tín TrầnNo ratings yet
- Chapter 8 - Mechanisms of Heat TransferDocument10 pagesChapter 8 - Mechanisms of Heat TransferBảo Tín TrầnNo ratings yet
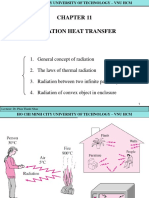
- Chapter 11 - Radiation Heat TransferDocument22 pagesChapter 11 - Radiation Heat TransferBảo Tín TrầnNo ratings yet
- Topic 3aDocument17 pagesTopic 3aBảo Tín TrầnNo ratings yet
- Lecture 1.1B-Introduction and Basic ConceptsDocument31 pagesLecture 1.1B-Introduction and Basic ConceptsBảo Tín TrầnNo ratings yet
- 02 Stress-Strain and Mechanical Properties HCMUT 2022Document37 pages02 Stress-Strain and Mechanical Properties HCMUT 2022Bảo Tín TrầnNo ratings yet
- Lecture 1.3-Properties of Fluids-Vapor Pressure&compressibilityDocument22 pagesLecture 1.3-Properties of Fluids-Vapor Pressure&compressibilityBảo Tín TrầnNo ratings yet
- Lecture 1.1A-Introduction To Fluids MechanicsDocument22 pagesLecture 1.1A-Introduction To Fluids MechanicsBảo Tín TrầnNo ratings yet
- Properties of Fluids-Cont.: EctureDocument15 pagesProperties of Fluids-Cont.: EctureBảo Tín TrầnNo ratings yet
- 01 Introduction of Mechanics of Deformable Solids HCMUT 2022Document68 pages01 Introduction of Mechanics of Deformable Solids HCMUT 2022Bảo Tín TrầnNo ratings yet
- 2application of Matrices - 2020Document94 pages2application of Matrices - 2020Bảo Tín TrầnNo ratings yet
- Chapter2 Aero 2022Document114 pagesChapter2 Aero 2022Bảo Tín TrầnNo ratings yet
- 3determinant 2020Document93 pages3determinant 2020Bảo Tín TrầnNo ratings yet
- Chapter3 Aero 2022Document155 pagesChapter3 Aero 2022Bảo Tín TrầnNo ratings yet
- Application of System of Linear Equations 2021Document43 pagesApplication of System of Linear Equations 2021Bảo Tín TrầnNo ratings yet
- 4system of Linear Equations 2021Document69 pages4system of Linear Equations 2021Bảo Tín TrầnNo ratings yet
- Eigenvalues and Eigenvectors: HCMC - 2021Document56 pagesEigenvalues and Eigenvectors: HCMC - 2021Bảo Tín TrầnNo ratings yet
- 5vector SpacesDocument113 pages5vector SpacesBảo Tín TrầnNo ratings yet
- Matrices and Matrix Operations: HCMC - 2021Document181 pagesMatrices and Matrix Operations: HCMC - 2021Bảo Tín TrầnNo ratings yet
- CO1003 - Chapter 1 - Introduction To Computers and ProgrammingDocument36 pagesCO1003 - Chapter 1 - Introduction To Computers and ProgrammingBảo Tín TrầnNo ratings yet
- CO1003 - Chapter 3 - Variables and Basic Data TypesDocument86 pagesCO1003 - Chapter 3 - Variables and Basic Data TypesBảo Tín TrầnNo ratings yet
- CO1003 - Chapter 5 - Iterative StatementsDocument43 pagesCO1003 - Chapter 5 - Iterative StatementsBảo Tín TrầnNo ratings yet
- CO1003 Chapter 6 FunctionsDocument50 pagesCO1003 Chapter 6 FunctionsBảo Tín TrầnNo ratings yet
- 1-Math 9-Q3-Week 2-Special ParallelogramsDocument30 pages1-Math 9-Q3-Week 2-Special ParallelogramsAngela Camille PaynanteNo ratings yet
- Ade 7.unit 1-Cool Downs-EnDocument12 pagesAde 7.unit 1-Cool Downs-Enjhariprasad.sarmaNo ratings yet
- Thangavelu Engineering College: Cs6513-Computer GraphicsDocument50 pagesThangavelu Engineering College: Cs6513-Computer GraphicsOOthaNo ratings yet
- Most Essential Learning Competencies: Center of Mass (CM)Document5 pagesMost Essential Learning Competencies: Center of Mass (CM)Katerina TagleNo ratings yet
- Maths - Coordinate Geometry (Prerequisites) (Notes)Document9 pagesMaths - Coordinate Geometry (Prerequisites) (Notes)Chandra Vamsi AdhikariNo ratings yet
- Metric NoteDocument68 pagesMetric NotezikibrunoNo ratings yet
- Bases de Diseño AiscDocument127 pagesBases de Diseño AiscZain AndabloNo ratings yet
- CUHK MATH 3060 Lecture Notes by KS ChouDocument98 pagesCUHK MATH 3060 Lecture Notes by KS ChouAlice YuenNo ratings yet
- Gtse Maths 2016Document13 pagesGtse Maths 2016ArchanaGuptaNo ratings yet
- Early Childhood GeometryDocument5 pagesEarly Childhood GeometryRubie Glenn PaetNo ratings yet
- DiffgeoDocument20 pagesDiffgeoMANIRAGUHA Jean PaulNo ratings yet
- Basic Engineering Correlation Solid Mensuration PDFDocument3 pagesBasic Engineering Correlation Solid Mensuration PDFseph100% (1)
- RevierwerDocument19 pagesRevierwerHiezen UndayNo ratings yet
- Electric Field Problem 2.7. Page 64Document3 pagesElectric Field Problem 2.7. Page 64afifahyulianiNo ratings yet
- Kinematics of Particles: Contact: 9029006464Document42 pagesKinematics of Particles: Contact: 9029006464ravi maskeNo ratings yet
- LeaP Math G4 Week 3 Q3Document4 pagesLeaP Math G4 Week 3 Q3Kimttrix WeizsNo ratings yet
- TCL Kodovi Za PBDocument64 pagesTCL Kodovi Za PBAnonymous PJP78mSx100% (1)
- Tools and Techniques: Electrical Methods: A Binley, Lancaster University, Lancaster, UKDocument27 pagesTools and Techniques: Electrical Methods: A Binley, Lancaster University, Lancaster, UKAlexandra GereaNo ratings yet
- 1 MWG Chapter 1 Preference and ChoiceDocument7 pages1 MWG Chapter 1 Preference and ChoiceDavid ZajicekNo ratings yet
- Teh Chin ChainDocument14 pagesTeh Chin ChainNoelia RevolloNo ratings yet
- Math ClearanceDocument30 pagesMath ClearanceAngel Joy ValenciaNo ratings yet
- Projection of Points, Lines and Plane Surfaces.: Ge 6152 - Engineering Graphics Unit - IiDocument55 pagesProjection of Points, Lines and Plane Surfaces.: Ge 6152 - Engineering Graphics Unit - IiArun Pravin APNo ratings yet
- Geometric Representation of Modulation SignalDocument4 pagesGeometric Representation of Modulation SignallokbandhuNo ratings yet
- Engineers Guide To Matlab 3rd Edition Magrab Solutions ManualDocument13 pagesEngineers Guide To Matlab 3rd Edition Magrab Solutions Manualmatthewmcculloughnwgdszykab100% (26)
- Higher IntegrationDocument53 pagesHigher IntegrationJasdeep SinghNo ratings yet
- The 36 Trig Identities You Need To KnowDocument16 pagesThe 36 Trig Identities You Need To Knowjohn hodgsonNo ratings yet
- 05 TransformationDocument51 pages05 TransformationAjay GhugeNo ratings yet