You might also like
- Exercise Problems On DC GeneratorsDocument2 pagesExercise Problems On DC GeneratorsSyed Arif Ahmed0% (1)
- Cyberpunk 2077 RulebookDocument28 pagesCyberpunk 2077 RulebookFelipe GamezNo ratings yet
- DIY Quick Reference Guide - 3300Document5 pagesDIY Quick Reference Guide - 3300allbsforakNo ratings yet
- Mik-El Elektronik San. Tic. Ltd. ŞtiDocument18 pagesMik-El Elektronik San. Tic. Ltd. Ştiasif mahmoodNo ratings yet
- BULL 1159 GL100 GL170 Machines Warner Brakes Repair and Maintenance ManualDocument9 pagesBULL 1159 GL100 GL170 Machines Warner Brakes Repair and Maintenance ManualZeljkoSipcicNo ratings yet
- ETSD Emergency TRaction Slowdown Test ProcedureDocument5 pagesETSD Emergency TRaction Slowdown Test ProcedurefreddyjoertyNo ratings yet
- 100 - 1. Lift Controller ManualDocument41 pages100 - 1. Lift Controller ManualDjordje GavrilovicNo ratings yet
- Analogue Speed Sensor Q264127 EngDocument5 pagesAnalogue Speed Sensor Q264127 EngPio RodolfoNo ratings yet
- DokumenDocument14 pagesDokumenTroubleshootingNo ratings yet
- PM 5 000279 en 01Document23 pagesPM 5 000279 en 01SavoyNo ratings yet
- MagnubroucherDocument12 pagesMagnubroucherrmdarisaNo ratings yet
- Prathama Solarconnect Energy Private Limited: Short Circuit Study ReportDocument18 pagesPrathama Solarconnect Energy Private Limited: Short Circuit Study Reportramesh cuppuNo ratings yet
- Ev100manual en PDFDocument13 pagesEv100manual en PDFdragishabl100% (1)
- Miconic F4Document20 pagesMiconic F4Coil98No ratings yet
- "Sound Innovation, On Call": EMS5 Call Director Easy Set-Up InstructionsDocument19 pages"Sound Innovation, On Call": EMS5 Call Director Easy Set-Up Instructionswayne mcmurrayNo ratings yet
- 10 Aaa21700ag PDFDocument9 pages10 Aaa21700ag PDFasdfNo ratings yet
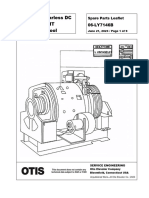
- 06 Ly7146bDocument9 pages06 Ly7146bm.omeracarNo ratings yet
- Pulley On Removal Procedure CarDocument9 pagesPulley On Removal Procedure CarSupri AdiNo ratings yet
- BL 2000Document132 pagesBL 2000Samuel AcevedoNo ratings yet
- ETSD Emergency Traction Slowdown Installation and Operation InstructionsDocument1 pageETSD Emergency Traction Slowdown Installation and Operation InstructionsfreddyjoertyNo ratings yet
- 006 - 2install CWT Roping and Remove Top Floor Working Platform - MRDocument9 pages006 - 2install CWT Roping and Remove Top Floor Working Platform - MRAli DiabNo ratings yet
- WHIPLPOOL AKZM 8920 - GK - 852589201100 - Service InformationDocument96 pagesWHIPLPOOL AKZM 8920 - GK - 852589201100 - Service InformationSashek68100% (2)
- Blain Service Manual GBDocument40 pagesBlain Service Manual GBsmsobhanNo ratings yet
- G..26160B.tension Carriage.508.512Document3 pagesG..26160B.tension Carriage.508.512Jean ChungNo ratings yet
- Operating Manual ArdDocument13 pagesOperating Manual Ardkolwin .chindwinNo ratings yet
- SER90E1Document192 pagesSER90E1ElputoAmo XDNo ratings yet
- Layout Open Lift Central Library A BlockDocument4 pagesLayout Open Lift Central Library A BlockPrateek JhanjiNo ratings yet
- Spurious "CAB PR EXCESS RESIDUAL PR" Due To Residual Pressure Switch 14WNDocument6 pagesSpurious "CAB PR EXCESS RESIDUAL PR" Due To Residual Pressure Switch 14WNHarryNo ratings yet
- CPSI Inspector Certification Translation 2012 - Version 15 February 2012-MKIDocument1 pageCPSI Inspector Certification Translation 2012 - Version 15 February 2012-MKIAli DiabNo ratings yet
- Sealing of Components - NI - Ver 03Document6 pagesSealing of Components - NI - Ver 03Ali DiabNo ratings yet
- DrakaTechTipNo.1 CompensatingChain PDFDocument2 pagesDrakaTechTipNo.1 CompensatingChain PDFKar Keong LewNo ratings yet
- UT ID 22.17.1 2 Otis Glide A Mechanical Installation Guide For Unitec PartsDocument26 pagesUT ID 22.17.1 2 Otis Glide A Mechanical Installation Guide For Unitec PartsPaul MakangaNo ratings yet
- 10 Aaa21700ac PDFDocument1 page10 Aaa21700ac PDFasdfNo ratings yet
- YDV Modular DC Inverter R-410A 60 HZ PDFDocument431 pagesYDV Modular DC Inverter R-410A 60 HZ PDFDaniel CarreteroNo ratings yet
- 7.2 Safety Brake - Q 409 710: 1 Description and Mode of OperationDocument7 pages7.2 Safety Brake - Q 409 710: 1 Description and Mode of OperationDobra Alexandru RomeoNo ratings yet
- Numbering System Updated - 06012017Document2 pagesNumbering System Updated - 06012017priyanka k lNo ratings yet
- برمجة الباب الصيني 2Document7 pagesبرمجة الباب الصيني 2AbdNo ratings yet
- лифт арбат 3Document42 pagesлифт арбат 3Anton LyakhovNo ratings yet
- (Op Buffer Installation) K 601125Document3 pages(Op Buffer Installation) K 601125Ali DiabNo ratings yet
- IP5A (5.5-450kW) Service Manual - 100827Document198 pagesIP5A (5.5-450kW) Service Manual - 100827cocodrilo36067% (3)
- Assingments On LatchingDocument4 pagesAssingments On LatchingsalonyNo ratings yet
- F3 9000 EngDocument7 pagesF3 9000 Engjohn_kyrNo ratings yet
- Personal Computer Embedded Type Servo System Controller: - MR-EM340GFDocument670 pagesPersonal Computer Embedded Type Servo System Controller: - MR-EM340GFAbdNo ratings yet
- 984-0110FS Full Size - R020212Document17 pages984-0110FS Full Size - R020212Anonymous zSpR5jUdNo ratings yet
- Manuel Minivator 2000Document46 pagesManuel Minivator 2000TUPET81100% (1)
- VHC-102 Hydraulic Control Specifications: Vertitron Midwest, IncDocument11 pagesVHC-102 Hydraulic Control Specifications: Vertitron Midwest, IncAngel IglesiasNo ratings yet
- Error Amplifier Design and ApplicationsDocument6 pagesError Amplifier Design and ApplicationsGhulam Abbas100% (1)
- Portable Elevator Tool 7100 1120 302 A0Document33 pagesPortable Elevator Tool 7100 1120 302 A0Mhamad ArabiNo ratings yet
- Gyrators To Replace PSU ChokesDocument3 pagesGyrators To Replace PSU Chokeschuongdv100% (2)
- Simply Handbook of Debugging (F5021-32 Bit Board)Document3 pagesSimply Handbook of Debugging (F5021-32 Bit Board)thanggimme.phanNo ratings yet
- Megatech & Miporm Drives Final - SPARESDocument1 pageMegatech & Miporm Drives Final - SPARESerick sanabriaNo ratings yet
- U2Document4 pagesU2TouficFereidNo ratings yet
- 800 KG (Car 1400 X 1350)Document2 pages800 KG (Car 1400 X 1350)Myo AungNo ratings yet
- Weltweit ! Worldwide!: RollenführungDocument3 pagesWeltweit ! Worldwide!: RollenführungsmsobhanNo ratings yet
- Vol88 PDFDocument32 pagesVol88 PDFArnold Thamrin van LutteranNo ratings yet
- EOS UCM Package EBRA20-UCM Insert For Operation Manual PM.7.002883.ENDocument16 pagesEOS UCM Package EBRA20-UCM Insert For Operation Manual PM.7.002883.ENВиктор АлимовNo ratings yet
- Use Manual: Goods / Passenger Lift GPL 25 GPL 40 GPL 40F GPL 80FDocument5 pagesUse Manual: Goods / Passenger Lift GPL 25 GPL 40 GPL 40F GPL 80FAnton LyakhovNo ratings yet
- Planos Schindler 2Document8 pagesPlanos Schindler 2equiser6131caNo ratings yet
- A-FLY Quotation For Schindler Parts-20170815-142636703Document2 pagesA-FLY Quotation For Schindler Parts-20170815-142636703habibullaNo ratings yet
- Hydraulic Car Frame WHF35 Direct and IndirectDocument38 pagesHydraulic Car Frame WHF35 Direct and Indirectmario escottoNo ratings yet
- TDI 300 TGL Manual Rev 10 March 2019 PDFDocument110 pagesTDI 300 TGL Manual Rev 10 March 2019 PDFMAYESTON0% (1)
- MUSE ED Elevator: Installation ManualDocument25 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
- PDF Translator 1678819931985 PDFDocument76 pagesPDF Translator 1678819931985 PDFMuMoMaNo ratings yet
- MUSE ED Elevator: Installation ManualDocument6 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
- 02 - Machine Room WiringWire ConnectingDocument3 pages02 - Machine Room WiringWire ConnectinggunawanNo ratings yet
- Icontrol DC Aug 08 Rel 42-02-7222 B7Document788 pagesIcontrol DC Aug 08 Rel 42-02-7222 B7ElputoAmo XDNo ratings yet
- ELEGOO HC-SR04 Ultrasonic Sensor ModuleDocument10 pagesELEGOO HC-SR04 Ultrasonic Sensor ModuleAhmadiAnouarNo ratings yet
- ELEGOO Smart Car Shield V3.0Document3 pagesELEGOO Smart Car Shield V3.0AhmadiAnouarNo ratings yet
- 01 - KIT33 UNO R3 BoardDocument8 pages01 - KIT33 UNO R3 BoardStephen J. RobertsNo ratings yet
- ELEGOO BT16 Bluetooth UART ModuleDocument10 pagesELEGOO BT16 Bluetooth UART ModuleAhmadiAnouarNo ratings yet
- ELEGOO SG90 9g Servo MotorDocument1 pageELEGOO SG90 9g Servo MotorAhmadiAnouarNo ratings yet
- Datasheet L298Document13 pagesDatasheet L298Anugera DewanggaNo ratings yet
- ELEGOO IR Remote ControllerDocument1 pageELEGOO IR Remote ControllerAhmadiAnouarNo ratings yet
- Magic Mirror: by Khinds10Document14 pagesMagic Mirror: by Khinds10AhmadiAnouarNo ratings yet
- ELEGOO Line Tracking Intergration ModuleDocument1 pageELEGOO Line Tracking Intergration ModuleAhmadiAnouarNo ratings yet
- What Is The Saddest Truth About Life?Document4 pagesWhat Is The Saddest Truth About Life?AhmadiAnouarNo ratings yet
- Coronavirus Update (Live) - 1,697,356 Cases and 102,667 Deaths From COVID-19 Virus Pandemic - Worldometer 10 APR 2020Document12 pagesCoronavirus Update (Live) - 1,697,356 Cases and 102,667 Deaths From COVID-19 Virus Pandemic - Worldometer 10 APR 2020AhmadiAnouarNo ratings yet
- Sensor Lm35Document0 pagesSensor Lm35Teguh Arif PratamaNo ratings yet
- Service Manual: Interchangeable Lens Digital CameraDocument43 pagesService Manual: Interchangeable Lens Digital CameraRicardo Jose Dos SantosNo ratings yet
- A Simple Floating MOS-Memristor For High-Frequency ApplicationsDocument11 pagesA Simple Floating MOS-Memristor For High-Frequency ApplicationsAnuradha KhalkhoNo ratings yet
- Pitot-Static/Air Data Tester: Operation and Maintenance ManualDocument29 pagesPitot-Static/Air Data Tester: Operation and Maintenance ManualVitaliy FedchenkoNo ratings yet
- ASML Veldhoven Visitor Information and Campus MapDocument1 pageASML Veldhoven Visitor Information and Campus MapForjohna ShaikNo ratings yet
- Negative Feedback and Negative Feedback Systems PDFDocument10 pagesNegative Feedback and Negative Feedback Systems PDFmarufuddin0No ratings yet
- HTB 313K (12V) Series Cyclic Performance V1.6, 21st Oct 2015Document5 pagesHTB 313K (12V) Series Cyclic Performance V1.6, 21st Oct 2015M. ShaatNo ratings yet
- Electrical Technology Tutorial Sheet 2: Single Phase AC NetworksDocument4 pagesElectrical Technology Tutorial Sheet 2: Single Phase AC NetworksShroyonNo ratings yet
- Chapter-3: Sequential Logic CircuitDocument15 pagesChapter-3: Sequential Logic CircuitPRABHAKAR MORENo ratings yet
- Stat Fax 2200: Microplate Incubator/Shaker Operator's ManualDocument13 pagesStat Fax 2200: Microplate Incubator/Shaker Operator's Manualzakarya alkubatiNo ratings yet
- Manual Reliance Shallow Base 8 and 12Document46 pagesManual Reliance Shallow Base 8 and 12sebastianNo ratings yet
- Science8 - q1 - Mod8 - Electric Circuit - v1Document24 pagesScience8 - q1 - Mod8 - Electric Circuit - v1Luanne Jali-JaliNo ratings yet
- Module 2 - Threshold Voltage and Body EffectDocument10 pagesModule 2 - Threshold Voltage and Body EffectSurya PrakashNo ratings yet
- Ex Long Short Stroke MKII Instruction Manual-022-UKDocument12 pagesEx Long Short Stroke MKII Instruction Manual-022-UKTom WtomNo ratings yet
- An Inexpensive Digital Gradient Controller For HPLCDocument1 pageAn Inexpensive Digital Gradient Controller For HPLCCamilo LaraNo ratings yet
- Stp9Nk60Z - Stp9Nk60Zfp STB9NK60Z - STB9NK60Z-1Document13 pagesStp9Nk60Z - Stp9Nk60Zfp STB9NK60Z - STB9NK60Z-1HerrOe ShieZhakaNo ratings yet
- Easty EDP Heat Press MANUALDocument13 pagesEasty EDP Heat Press MANUALAthenogenes GastadorNo ratings yet
- Department of Technical Education Board of Technical Examinations, BengaluruDocument9 pagesDepartment of Technical Education Board of Technical Examinations, BengaluruArindam SenNo ratings yet
- Rustomjee Uptown Urbania BrochureDocument38 pagesRustomjee Uptown Urbania BrochureShaniaNo ratings yet
- Aft3904 1am TransistorDocument6 pagesAft3904 1am TransistorBrayanJerezClaseAparteNo ratings yet
- Olympia Burner ManualDocument18 pagesOlympia Burner ManualRainiel C. Panti100% (1)
- Rondostar 5000 - All I Need - 04334 - EN - Original FileDocument12 pagesRondostar 5000 - All I Need - 04334 - EN - Original FileTrisha R.No ratings yet
- Notes - AC Circuit Part 2Document1 pageNotes - AC Circuit Part 2jhon casungcadNo ratings yet
- CAT24WC256: 256K-Bit I C Serial Cmos EepromDocument10 pagesCAT24WC256: 256K-Bit I C Serial Cmos EepromAntonio ManuelNo ratings yet
- DAF LF 321 (654-11) Injector 4 Bank 2Document6 pagesDAF LF 321 (654-11) Injector 4 Bank 2Rowan CorneliusNo ratings yet