You might also like
- ADB AGL3 - Module 6 CCR's & Associated EquipmentsDocument8 pagesADB AGL3 - Module 6 CCR's & Associated EquipmentsAnnisa Madaningrum100% (1)
- Performance Analysis of 33 11kv Substation and Its FeedersDocument6 pagesPerformance Analysis of 33 11kv Substation and Its FeedersShivang LowanshiNo ratings yet
- Astm A815-A815m-22Document8 pagesAstm A815-A815m-22ali ahmad100% (1)
- Iso+12312 3 2022Document12 pagesIso+12312 3 2022ali ahmadNo ratings yet
- Iso 18893-2014Document32 pagesIso 18893-2014ali ahmadNo ratings yet
- ASCE 7 Wind Load CalculationDocument22 pagesASCE 7 Wind Load Calculationani145yadavNo ratings yet
- SOCOMEC - 18013 - EN - Protection - Switching - Neutral - Issues - IECDocument21 pagesSOCOMEC - 18013 - EN - Protection - Switching - Neutral - Issues - IECAlexandru-Mihnea RaduNo ratings yet
- Investigation of The Sympathetic Tripping Problem in Power SystemsDocument15 pagesInvestigation of The Sympathetic Tripping Problem in Power SystemsSasi prasadNo ratings yet
- Analysis of Various Topologies and Control Circuit Used in Single Phase EV ChargerDocument13 pagesAnalysis of Various Topologies and Control Circuit Used in Single Phase EV ChargerIJRASETPublicationsNo ratings yet
- Izadfar 2005Document5 pagesIzadfar 2005pedramNo ratings yet
- XBDGNFGDocument5 pagesXBDGNFGehsan mirabadiNo ratings yet
- Fusing IGBT-based Inverters: Abstract. The Number of Applications Based OnDocument9 pagesFusing IGBT-based Inverters: Abstract. The Number of Applications Based OnMohammed Al gobariNo ratings yet
- Flyer 023Document4 pagesFlyer 023Pankaj Kumar SinghNo ratings yet
- 07 TT 01 Eskom Protection-SchemeDocument3 pages07 TT 01 Eskom Protection-Schemeakm-ntpcNo ratings yet
- 9AKK107992A9528 - Technical - Note - Site Planning ToolDocument14 pages9AKK107992A9528 - Technical - Note - Site Planning ToolKourosh52No ratings yet
- Introduction of Low-Voltage Circuit BreakersDocument39 pagesIntroduction of Low-Voltage Circuit BreakersvoNo ratings yet
- Cost State: Circuit BreakerDocument6 pagesCost State: Circuit Breakerrazila rasheedNo ratings yet
- 33kv Indoor Gas Insulated Switchgear - Rev 0Document8 pages33kv Indoor Gas Insulated Switchgear - Rev 0Koushik BhaumikNo ratings yet
- Biasing CircuitsDocument16 pagesBiasing CircuitsronaldbuijsNo ratings yet
- A Novel Voltage-Mode Universal Filter Composed of Two Terminal Active DeviceDocument8 pagesA Novel Voltage-Mode Universal Filter Composed of Two Terminal Active DeviceVinod Kumar VermaNo ratings yet
- Lok - TRAFO BCT Size R0Document9 pagesLok - TRAFO BCT Size R0Nageswar MakalaNo ratings yet
- Voltage Sag Mitigation by Using Photovoltaic Based Dynamic Voltage Restorer in Barak Valley Power SystemDocument7 pagesVoltage Sag Mitigation by Using Photovoltaic Based Dynamic Voltage Restorer in Barak Valley Power Systemashwani yadavNo ratings yet
- A Reliable Single-Phase Bipolar Buck-Boost Direct PWM AC-AC Converter With Continuous Input/ Output CurrentsDocument12 pagesA Reliable Single-Phase Bipolar Buck-Boost Direct PWM AC-AC Converter With Continuous Input/ Output CurrentsDar JahangeerNo ratings yet
- Power Electronics Lab Manual PDFDocument72 pagesPower Electronics Lab Manual PDFGopinath B L NaiduNo ratings yet
- Ieee 4 PDFDocument1 pageIeee 4 PDFJayagurunathanNo ratings yet
- Low Profile Power ModuleDocument6 pagesLow Profile Power Moduleamp divisionNo ratings yet
- Pel S6 Cel OkokDocument11 pagesPel S6 Cel Okokves vegasNo ratings yet
- Eciency Measurements of Ultrasonic Generator For Welding: W. Kardy and A. MilewskiDocument5 pagesEciency Measurements of Ultrasonic Generator For Welding: W. Kardy and A. MilewskiPhilip EgyNo ratings yet
- Expt 10 Bistable MultivibratorDocument4 pagesExpt 10 Bistable MultivibratorsamarthNo ratings yet
- B ELSB Cat 2020 II 01 MCBs Preview 26-10-2020Document204 pagesB ELSB Cat 2020 II 01 MCBs Preview 26-10-2020tan yangNo ratings yet
- REH984e 05Document16 pagesREH984e 05Jaya AdnyanaNo ratings yet
- Fuji IGBT Protection PDFDocument17 pagesFuji IGBT Protection PDFsamacda1000No ratings yet
- REH984b 05a PDFDocument17 pagesREH984b 05a PDFcritestachNo ratings yet
- Cahier Technique No. 199 Page 31 - 32Document2 pagesCahier Technique No. 199 Page 31 - 32Muklis AhmadNo ratings yet
- 66 11 KV Distribution Substation Design Ijariie2764Document11 pages66 11 KV Distribution Substation Design Ijariie2764Zoila Chang ChongNo ratings yet
- NextECMUpload 34264224 20201209145212Document14 pagesNextECMUpload 34264224 20201209145212karim_ouakliNo ratings yet
- Et01-Ag02-200-El-Sld-Sp-7041 R0Document44 pagesEt01-Ag02-200-El-Sld-Sp-7041 R0Darshit VyasNo ratings yet
- MODULE 6 Distribution of Electric PowerDocument54 pagesMODULE 6 Distribution of Electric PowerSharapov Mechanic (Все просто)100% (2)
- 66kV NER PDFDocument5 pages66kV NER PDFDEADMANNo ratings yet
- Bootstrap For IC PDFDocument5 pagesBootstrap For IC PDFDuc NguyenNo ratings yet
- PDF Cable Sizing 1 CompressDocument8 pagesPDF Cable Sizing 1 CompressrsdgdhNo ratings yet
- Switchyard Protections: By-Priyank ShahDocument38 pagesSwitchyard Protections: By-Priyank ShahSrikanth ReddyNo ratings yet
- LOW Voltage, Low Power, High Performance Current Conveyors: Rajpiit and JamiiarDocument4 pagesLOW Voltage, Low Power, High Performance Current Conveyors: Rajpiit and Jamiiarapi-3834272No ratings yet
- Solar Powered Reactive Power Compensation in Single-Phase Operation of MicrogridDocument18 pagesSolar Powered Reactive Power Compensation in Single-Phase Operation of MicrogridNarendra PatilNo ratings yet
- Oscilador RFDocument6 pagesOscilador RFmarta fakeNo ratings yet
- B Elsb Cat 2021 01 McbsDocument190 pagesB Elsb Cat 2021 01 McbsCr1234512No ratings yet
- Fault Current Limiting Dynamic Voltage RestorerDocument5 pagesFault Current Limiting Dynamic Voltage RestorerAnonymous DbmKEDxNo ratings yet
- Basic Mill Electrical CourseDocument116 pagesBasic Mill Electrical CourseUsop CRuzNo ratings yet
- Relay Coordination Calculations and Time Current CurvesDocument7 pagesRelay Coordination Calculations and Time Current CurvesFareh KhanNo ratings yet
- New Compact Gas-Insulated Switchgear: Table 1 Ratings and SpecificationsDocument5 pagesNew Compact Gas-Insulated Switchgear: Table 1 Ratings and SpecificationsNur FajarNo ratings yet
- Septum Magnet Power SuppliesDocument3 pagesSeptum Magnet Power SuppliesTrongTanLeNo ratings yet
- Power Electronics محاضراتDocument159 pagesPower Electronics محاضراتHasan Al-asadiNo ratings yet
- DC Ground Fault AnalysisDocument1 pageDC Ground Fault Analysisalvin meNo ratings yet
- Lead-Acid Charger Development System: Control of On-Board P-FET Switch-Mode RegulatorDocument8 pagesLead-Acid Charger Development System: Control of On-Board P-FET Switch-Mode RegulatorcnkoNo ratings yet
- Novel ForwardFlyback Hybrid Bidirectional DCDC ConverterDocument7 pagesNovel ForwardFlyback Hybrid Bidirectional DCDC ConverterHsekum RamukNo ratings yet
- Meeting The Challenges of Battery ProtectionDocument24 pagesMeeting The Challenges of Battery ProtectionMekaNo1DNo ratings yet
- Data Sheet RSTDocument4 pagesData Sheet RSTIndra Hans AditiyaNo ratings yet
- A Cascaded Schwarz Converter For High Frequency Power DistributionDocument8 pagesA Cascaded Schwarz Converter For High Frequency Power Distributionozoemena29No ratings yet
- High Voltage Engineering PDFDocument70 pagesHigh Voltage Engineering PDFNilNo ratings yet
- Schneider - ETC 5-Coordination of LV Protection Devices PDFDocument48 pagesSchneider - ETC 5-Coordination of LV Protection Devices PDFmanfredm6435No ratings yet
- Design Modelling Analysis and Implementation of Two Phase Interleaved Buck DC DC ConverterDocument8 pagesDesign Modelling Analysis and Implementation of Two Phase Interleaved Buck DC DC ConverterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Estimation of Junction Temperature and Power Loss of IGBT Used in VVVF Inverter Using Numerical Solution From Data Sheet ParameterDocument6 pagesEstimation of Junction Temperature and Power Loss of IGBT Used in VVVF Inverter Using Numerical Solution From Data Sheet Parameterzeevko1249No ratings yet
- BS 05944-1-1992 (1999) Iso 4412-1-1991Document26 pagesBS 05944-1-1992 (1999) Iso 4412-1-1991ali ahmadNo ratings yet
- Iec 60364-5-57 - 2022Document28 pagesIec 60364-5-57 - 2022ali ahmadNo ratings yet
- J6 - TPWRD 00370 2003Document16 pagesJ6 - TPWRD 00370 2003ali ahmadNo ratings yet
- 18-30368743 DC - (2021-05-10 - 06-12-41 PM)Document59 pages18-30368743 DC - (2021-05-10 - 06-12-41 PM)ali ahmadNo ratings yet
- BS 05944-2-1992 (2000) Iso 4412-2-1991Document24 pagesBS 05944-2-1992 (2000) Iso 4412-2-1991ali ahmadNo ratings yet
- Shear Adhesion of Pressure-Sensitive Tapes: Standard Test Methods ForDocument6 pagesShear Adhesion of Pressure-Sensitive Tapes: Standard Test Methods Forali ahmadNo ratings yet
- Single Line Drawing For 14x3MW Power Plant PDFDocument1 pageSingle Line Drawing For 14x3MW Power Plant PDFali ahmadNo ratings yet
- Shear Adhesion of Pressure-Sensitive Tapes: Standard Test Methods ForDocument6 pagesShear Adhesion of Pressure-Sensitive Tapes: Standard Test Methods Forali ahmadNo ratings yet
- Lessons Learned Quick Reference GuideDocument36 pagesLessons Learned Quick Reference Guideali ahmadNo ratings yet
- Organization For Management and Operation of Power PlantDocument14 pagesOrganization For Management and Operation of Power Plantali ahmadNo ratings yet
- LL20140601 Generation Relaying Underfrequency Protection Coordination FinalDocument2 pagesLL20140601 Generation Relaying Underfrequency Protection Coordination Finalali ahmadNo ratings yet
- Exceptions Doc V1 11Document38 pagesExceptions Doc V1 11ali ahmadNo ratings yet
- PRC-019-2 Coordination of Voltage Control Systems Protection Systems and Equipment Capabilities (RSTC)Document69 pagesPRC-019-2 Coordination of Voltage Control Systems Protection Systems and Equipment Capabilities (RSTC)ali ahmadNo ratings yet
- Jis G 4053-2008Document21 pagesJis G 4053-2008ali ahmadNo ratings yet
- تاسع unit 3 workbook3 PDFDocument3 pagesتاسع unit 3 workbook3 PDFali ahmadNo ratings yet
- BS 4415 1 1992 Determination of PDFDocument12 pagesBS 4415 1 1992 Determination of PDFali ahmadNo ratings yet
- Thyristor Static Excitation Systems PDFDocument2 pagesThyristor Static Excitation Systems PDFali ahmadNo ratings yet
- Iso Iec 14143-6-2012 PDFDocument28 pagesIso Iec 14143-6-2012 PDFali ahmadNo ratings yet
- تاسع اختبار الوحدة الخامسة 2 PDFDocument3 pagesتاسع اختبار الوحدة الخامسة 2 PDFali ahmadNo ratings yet
- تاسع مواضيع كل الكتاب-1Document4 pagesتاسع مواضيع كل الكتاب-1ali ahmadNo ratings yet
- Ma Shwe Myint NCSEDocument5 pagesMa Shwe Myint NCSEali ahmadNo ratings yet
- High Voltage Busbar Protection R1Document45 pagesHigh Voltage Busbar Protection R1ali ahmadNo ratings yet
- IEEE STD 142-2007 Errata 2014Document2 pagesIEEE STD 142-2007 Errata 2014ali ahmadNo ratings yet
- The Following Text and Tasks Below Ead R Following Text and Tasks Below: The ReadDocument2 pagesThe Following Text and Tasks Below Ead R Following Text and Tasks Below: The Readali ahmadNo ratings yet
- Cloud Point of Petroleum Products and Liquid Fuels: Standard Test Method ForDocument6 pagesCloud Point of Petroleum Products and Liquid Fuels: Standard Test Method Forali ahmadNo ratings yet
- Test Grade 2Document5 pagesTest Grade 2ali ahmadNo ratings yet
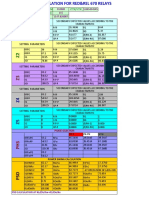
- Setting Calculation For Red&rel 670 RelaysDocument3 pagesSetting Calculation For Red&rel 670 Relaysali ahmadNo ratings yet
- First Final Examination in Science 7Document8 pagesFirst Final Examination in Science 7Teresa Marie CorderoNo ratings yet
- Pagine Per L'Insegnante: Idee Per Una Lezione DigitaleDocument6 pagesPagine Per L'Insegnante: Idee Per Una Lezione DigitaleVasile TurtaNo ratings yet
- Nanofiltration As A Pretreatment Step in Seawater Desalination: A ReviewDocument52 pagesNanofiltration As A Pretreatment Step in Seawater Desalination: A ReviewRaul RebolledoNo ratings yet
- Errata Aci 318-08aDocument3 pagesErrata Aci 318-08agodfreye1No ratings yet
- Iit Jam ChemistryDocument9 pagesIit Jam ChemistryUni ManchesterNo ratings yet
- Ch2 Aircraft LoadsDocument24 pagesCh2 Aircraft LoadsDragon ZNNo ratings yet
- Gas Chromatography - WikipediaDocument13 pagesGas Chromatography - WikipediaMuhammed BatureNo ratings yet
- 5kVA Dry Type Transformer SpecsDocument1 page5kVA Dry Type Transformer SpecsKillua X Ma'rufNo ratings yet
- Curs-3 Spatii Vectoriale, EuclidieneDocument50 pagesCurs-3 Spatii Vectoriale, Euclidieneprica_adrianNo ratings yet
- Neo2 BlendDocument2 pagesNeo2 BlendAlexandra JanicNo ratings yet
- Full-3D Seismic Waveform Inversion Theory, Software and Practice by Po Chen, En-Jui Lee PDFDocument543 pagesFull-3D Seismic Waveform Inversion Theory, Software and Practice by Po Chen, En-Jui Lee PDFMauricio MarentesNo ratings yet
- Voltage Regulation of Single Phase TransformerDocument6 pagesVoltage Regulation of Single Phase TransformerMuhammad Ali HaiderNo ratings yet
- Pipe Lukspam.Document477 pagesPipe Lukspam.Jm DaguimolNo ratings yet
- Radiation Protection in Digital Radiology: Optimisation of Digital Fluoroscopy L04Document60 pagesRadiation Protection in Digital Radiology: Optimisation of Digital Fluoroscopy L04Valantina ShapelNo ratings yet
- Review 2 ElectricalWiringDocument11 pagesReview 2 ElectricalWiringPriyaranjan DasNo ratings yet
- BS en 13001-3-4-2018Document114 pagesBS en 13001-3-4-2018Ash TurnerNo ratings yet
- G12 Unit and MeasurementsDocument19 pagesG12 Unit and MeasurementsAlgerd MoscosaNo ratings yet
- Thermodynamic Property Relations: Çengel BolesDocument19 pagesThermodynamic Property Relations: Çengel Boleskebaman1986No ratings yet
- 〈645〉 WATER CONDUCTIVITYDocument4 pages〈645〉 WATER CONDUCTIVITYliêmNo ratings yet
- Application of Jute Fiber in Soil StabilizationDocument8 pagesApplication of Jute Fiber in Soil StabilizationMary Joy ManayagaNo ratings yet
- M3 Full Syllabus in Simple ExplanationDocument2 pagesM3 Full Syllabus in Simple Explanationpraveen srikarNo ratings yet
- Bmz1Kas 1,8/3 KV - Medium Voltage Power Cable: DescriptionDocument3 pagesBmz1Kas 1,8/3 KV - Medium Voltage Power Cable: DescriptionMauricio AgudeloNo ratings yet
- Material Selection Using Ashby MethodDocument6 pagesMaterial Selection Using Ashby MethodRaúl AnelNo ratings yet
- Test3 ProblemBank Fa22Document7 pagesTest3 ProblemBank Fa22Pedro TNo ratings yet
- Allowable Settlement of FoundationsDocument6 pagesAllowable Settlement of Foundationssb1966No ratings yet
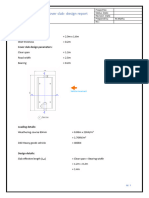
- D400-Precast Cover Slab Design ReportDocument8 pagesD400-Precast Cover Slab Design ReportmathuNo ratings yet
- Allengers HF 49 Service ManualDocument6 pagesAllengers HF 49 Service Manualdemon6592No ratings yet
- WEG Severe Duty Is Standard With W22 Motors USAW22SEVDUTY.7.2017 Brochure English WebDocument16 pagesWEG Severe Duty Is Standard With W22 Motors USAW22SEVDUTY.7.2017 Brochure English WebPAULO SOUZANo ratings yet
- E.M.D Chapter - 02Document69 pagesE.M.D Chapter - 02Adityasingh ChauhanNo ratings yet